

35.Представление в пространстве состояний и модель «вход-выход»
П редставление
в пространстве состояний.
dx/dt
=
Ax + Bu + Гd;
x(0)
– начальные условия
y
= Cx
x
- n-мерный вектор состояний; u
-
m-мерный вектор управления; d
-
k-мерный вектор возмущений; y
- l-мерный
вектор выхода;
А=[n´n]
Г=[n´k]
В=[n´m]
С=[l´n]
редставление
в пространстве состояний.
dx/dt
=
Ax + Bu + Гd;
x(0)
– начальные условия
y
= Cx
x
- n-мерный вектор состояний; u
-
m-мерный вектор управления; d
-
k-мерный вектор возмущений; y
- l-мерный
вектор выхода;
А=[n´n]
Г=[n´k]
В=[n´m]
С=[l´n]
Модель «выход-вход»

![]() -
частотная область
-
частотная область
L - преобразование Лапласа
Преобразование Лапласа - представление в частотной области . Обозначим: f(t) – оригинал; F(s)- изображение.
![]() -
одностороннее преобразование
Лапласа.
Условия, необходимые для
использования преобразования Лапласа:
1.
f(t)
непрерывна на интервале t
³
0,
непрерывность может быть нарушена
только лишь конечным числом разрывов
1-го рода.
2.
f(t) = 0
при t
< 0
3.
f(t)
не должна иметь неограниченного роста
-
одностороннее преобразование
Лапласа.
Условия, необходимые для
использования преобразования Лапласа:
1.
f(t)
непрерывна на интервале t
³
0,
непрерывность может быть нарушена
только лишь конечным числом разрывов
1-го рода.
2.
f(t) = 0
при t
< 0
3.
f(t)
не должна иметь неограниченного роста
По одной и той же передаточной функции можно построить целое семейство уравнений в пространстве состояний. Это происходит потому, что передаточная функция - это рациональная дробь, а числитель и знаменатель ее представлены в виде полиномов, часто имеющих общие корни. При сокращении нарушается эквивалентность представления. Условиям однозначного перехода от частотной области к временной является выполнение условий управляемости и наблюдаемости.
34. Единый подход к линеаризации.

Ф(x) - нелинейный элемент; Примеры нелинейных элементов.
1. Логистическая кривая, сигмоидальная
2.Характеристика зоны нечувствительности.
3. Гистерезис.
у=
Ф(x) -
нелинейная характеристика
![]() -
линеаризованная характеристика
1.
K(s)
- коэффициент статической линеаризации
2. K(d)
- коэффициент динамической (дифференциальной)
линеаризации
3. K(h)
- коэффициент гармонической линеаризации
4.
K(st)
- коэффициент статистической
линеаризации
Коэффициенты типа 1, 2
(k(s),
k(d))
y
= Ф(x)
-
линеаризованная характеристика
1.
K(s)
- коэффициент статической линеаризации
2. K(d)
- коэффициент динамической (дифференциальной)
линеаризации
3. K(h)
- коэффициент гармонической линеаризации
4.
K(st)
- коэффициент статистической
линеаризации
Коэффициенты типа 1, 2
(k(s),
k(d))
y
= Ф(x)
![]()
![]()
![]()
![]()
Коэффициенты типа 3 (k(h)) x(t) = Asin(wt) y =Ф(x)=Ф(Asin(wt))
![]()
![]()
а)
![]()
б)
![]()
![]()
![]()
а)
![]() ;
б)
;
б)
![]()
![]()
![]()
![]()
Используется при создании нелинейных систем уравнений. Коэффициент k(st)

![]() где
x(t)
- случайный процесс
где
x(t)
- случайный процесс
![]()
![]()
![]()
![]()
![]()
![]()
33. Общая схема нечеткого вывода.
Нечеткие правила вывода.
Базовое правило вывода типа "если - то" (англ.: if - then rule) называется также нечеткой импликацией, принимающей форму если x это A, то y это B , где А и В - это лингвистические значения, идентифицированные нечетким способом через соответствующие функции принадлежности для переменных х и у. Часть "х это А" называется условием (предпосылкой), а "у это В" - следствием (заключением).
Нечеткое рассуждение - это процедура, которая позволяет определить заключение, вытекающее из множества правил "если - то".
Такое множество при N переменных Xi может принять вид: если X1 это A1 и X2 это A2 …. и Xn это An, то y это B ,
Структура нечеткой системы с фуззификатором и дефуззификатором.
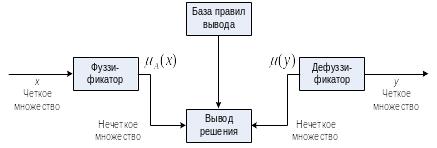
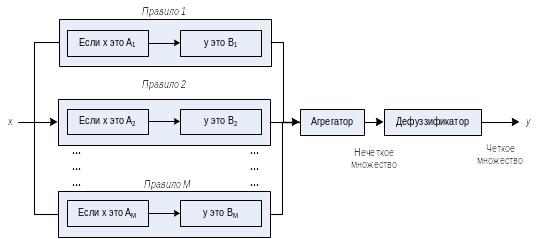
Организация вывода в нечеткой системе при наличии M правил вывода.
Основные этапы нечеткого вывода
Диаграмма деятельности процесса нечеткого вывода.
 =>
формирование базы правил => фаззификация
входных переменных => агрегирование
подусловий => активизация подзаключений
=> аккумулирование заключений =>
=>
формирование базы правил => фаззификация
входных переменных => агрегирование
подусловий => активизация подзаключений
=> аккумулирование заключений =>
Формирование базы правил систем нечеткого вывода.
База правил систем нечеткого вывода предназначена для формального представления эмпирических знаний или знаний экспертов в той или иной проблемной области.
В системах нечеткого вывода используются правила нечетких продукций, в которых условия и заключения сформулированы в терминах нечетких лингвистических высказываний рассмотренных выше видов.
Совокупность таких правил называется базами правил нечетких продукций.