25. Правило Верещагіна
За правилом Верещагіна для обчислення інтеграла \MjMpdx достатньо помножити площу
епюри
![]() I
на ординату епюри,
I
на ординату епюри,
![]() що
береться під
центром
тяжіння
епюри
що
береться під
центром
тяжіння
епюри![]() (рис.3.8):
(рис.3.8):
Я кщо
ордината yt
i
площа А
розташовані
по
один і
той
самий бік
стержня,
добуток береться зі
знаком
"плюс". Насправді,
розглянемо
обчислення інтеграла
кщо
ордината yt
i
площа А
розташовані
по
один і
той
самий бік
стержня,
добуток береться зі
знаком
"плюс". Насправді,
розглянемо
обчислення інтеграла
 на
прикладі
перемножения
двох
на
прикладі
перемножения
двох
епюр
(рис.3.9), одна з яких![]() мае
довільний
характер,
а друга -обмежена
мае
довільний
характер,
а друга -обмежена![]() прямою.
Добуток
прямою.
Добуток![]() є
елементарною
площею, яка береться на епюрі
є
елементарною
площею, яка береться на епюрі![]()
![]()
О рдинату
на прямолінійній
епюрі можна
представити у вигляді
Мі
=
xtg(3
. Зрештою інтеграл
набуває вигляду:
рдинату
на прямолінійній
епюрі можна
представити у вигляді
Мі
=
xtg(3
. Зрештою інтеграл
набуває вигляду:
Інтеграл
у
правій
частині співвідношення -
це
статичний момент
Sp
площі
епюри![]() стосовно осі у\,
яка
проходить через точку перетину епюри
стосовно осі у\,
яка
проходить через точку перетину епюри
![]() з
прямою, що збігається
з
віссю
стержня.
Як відомо,
статичний
момент площі
дорівнює добутку площі на
координату центра її
тяжіння
з
прямою, що збігається
з
віссю
стержня.
Як відомо,
статичний
момент площі
дорівнює добутку площі на
координату центра її
тяжіння![]() .
На цій
під ставі маємо
.
На цій
під ставі маємо
Необхідно звернути увагу:
принаймні одна з епюр , які перемножуються, має бути прямолінійною;
ордината уі повинна бути взята на прямолінійній епюрі.
I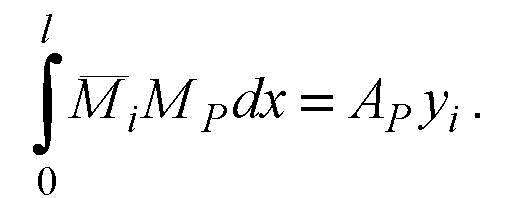 нарешті,
помітивши, що
нарешті,
помітивши, що![]() остаточно
одержуємо:
остаточно
одержуємо:
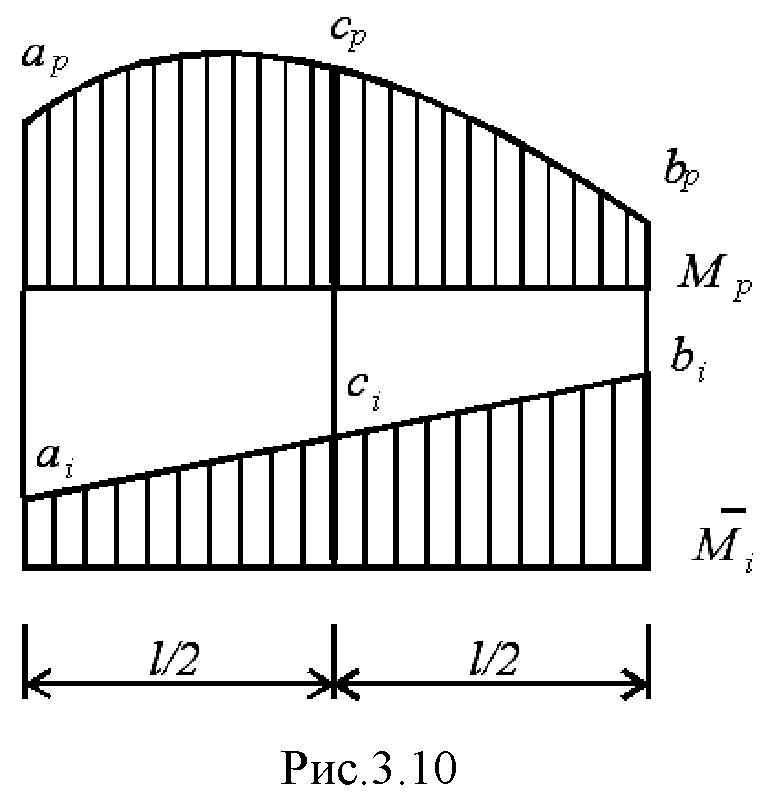
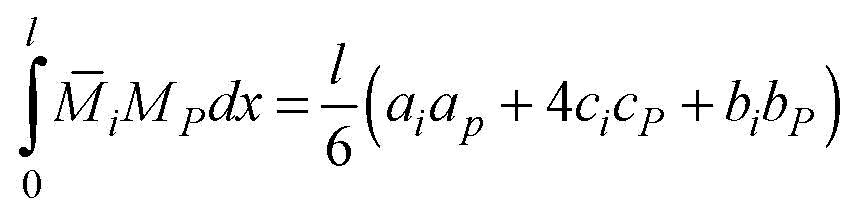
26.Формула Сімпсона–Корноухова
– це
окремий випадок відомої з математичного
аналізу формули Сімпсона (формули
парабол)
для
обчислення
визначених інтегралів, коли
інтервал
інтегрування розкладається на
дві
ділянки (рис.3.10):
це
окремий випадок відомої з математичного
аналізу формули Сімпсона (формули
парабол)
для
обчислення
визначених інтегралів, коли
інтервал
інтегрування розкладається на
дві
ділянки (рис.3.10):
При використанні формули Сімпсона–Корноухова необхідно, щоб обидві перемножувані епюри не мали зламів, розривів та точок перегину. В противному разі інтервал інтегрування треба розкласти на окремі підінтервали.
Приклад 3.1. Обчислити кут повороту в перерізі k рами (рис.3.11,а).
П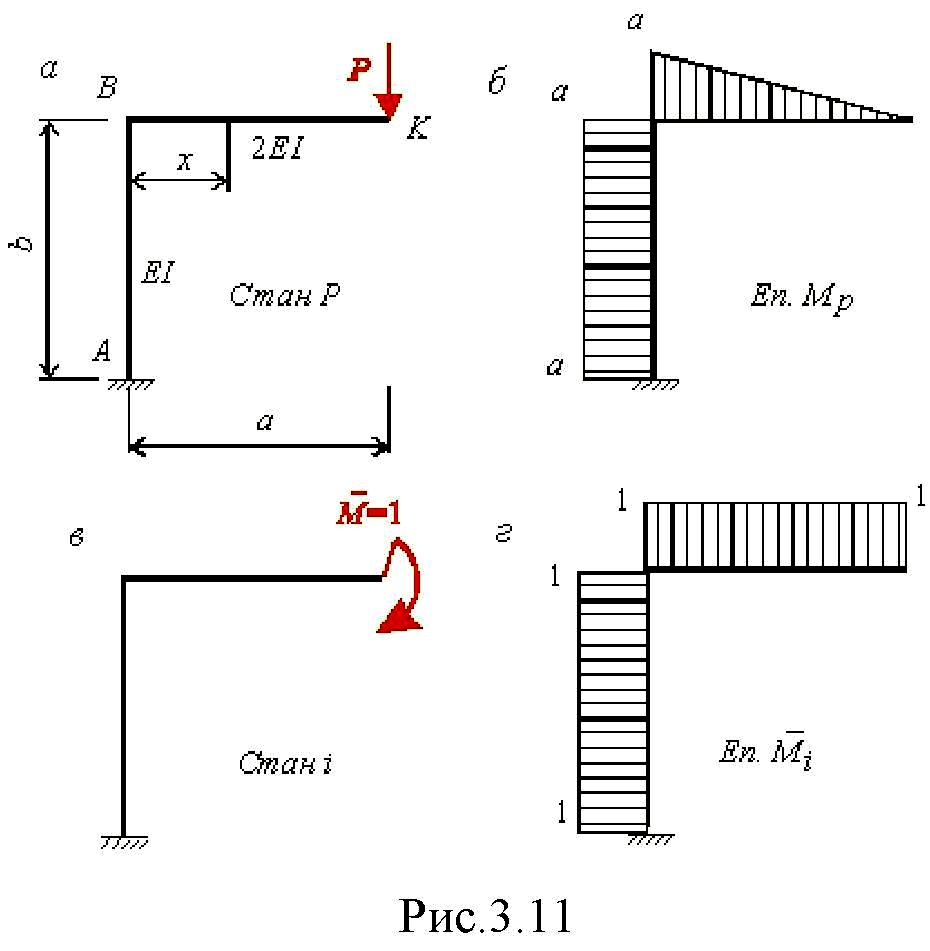 роцес
розв’язання містить чотири етапи:
роцес
розв’язання містить чотири етапи:
1. Визначення зусилля від зовнішнього навантаження. На ригелі: M p = P( a - x ), на стійці
Mp = Pa. Епюру Mp побудовано на рис.3.11,б.
Створення допоміжного стану. Допоміжний стан (стан i) зображено на рис.3.11,в.
Визначення зусиль в допоміжному стану: на ригелі Mi =1, на стояку Mi =1. Епюру Mi
побудовано на рис.3.11,г.
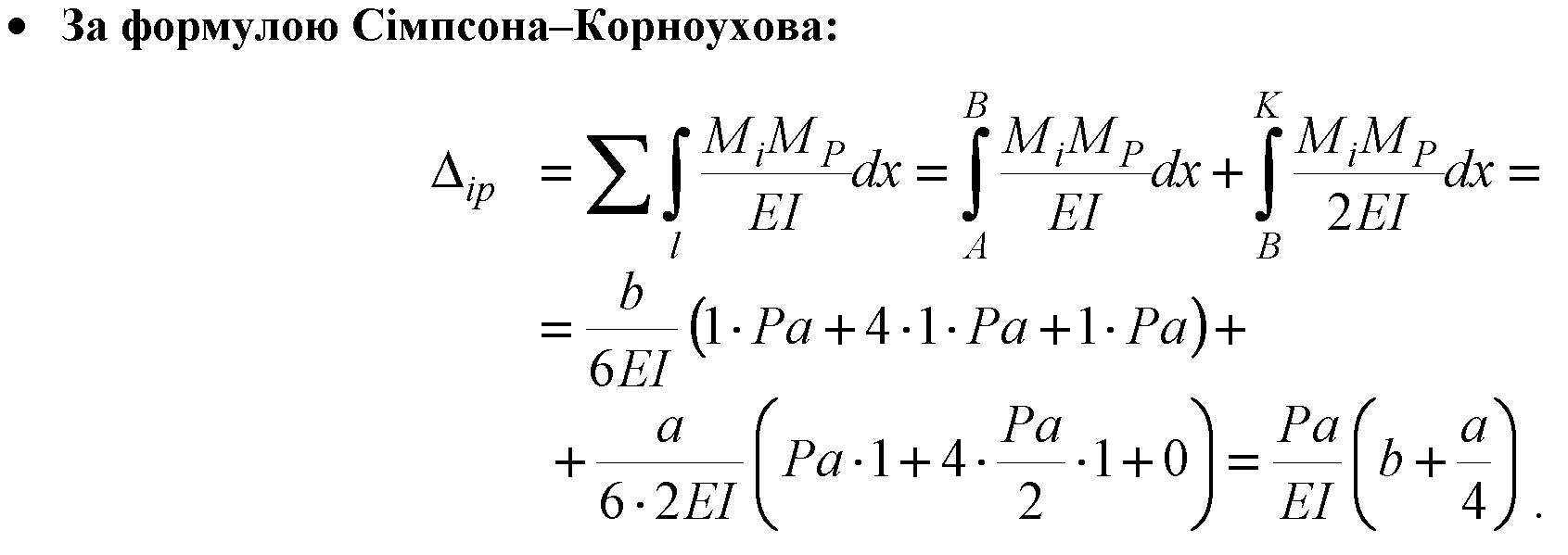 4. Обчислення
переміщення за
формулою Мора.
4. Обчислення
переміщення за
формулою Мора.
27. Обчислення переміщень, зумовлених зміщеннями опор
Якщо опори споруди зміщуються, то споруда змінює своє розташування, а її точки одержують переміщення. При цьому неважко впевнитись у тому, що в статично визначуваних системах опорні реакції, внутрішні зусилля і деформації елементів дорівнюють нулю.
Для обчислення якогось переміщення, зумовленого зміщенням опор споруди, скористаємось принципом можливих переміщень. Розглянемо два можливі стани споруди.
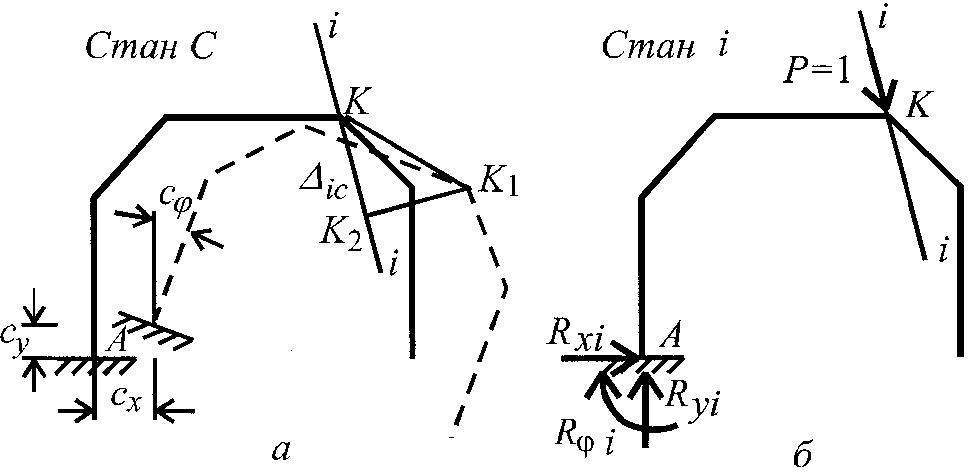
Перший стан С зумовлено поступальними переміщеннями затиснення Cx і Cy в напрямі координатних осей і поворотом на кут Cф. Як уже згадувалось, деформації елементів у цьому стані не виникають. У допоміжному стані і на раму в напрямі і-і діє одинична зосереджена сила, яка спричинює опорні реакції Rxi, Ryi і Rфi . Розглянемо роботу сил стану і на переміщеннях стану С. Згідно з принципом можливих переміщень.
Аіс+иіс=0. (3.36)