

Лекция №7. Встроенные локальные сети цвм.
CAN-контроллерная местная сеть (Controller Area Network).
Сеть CAN.
CAN - название последовательного интерфейса, который был разработан компанией BOSCH - ведущим поставщиком автоэлектроники, в начале 90х годов, первоначально для использования в автомобильных приложениях. Сегодня на рынке можно найти более сотни реализаций протоколов CAN в виде отдельных микросхем или интерфейсов, интегрированных в оборудование, оснащенное микроконтроллерами.
Ныне CAN рассматривается как стандартный последовательный интерфейс - стандартная контроллерная сеть для распределенных систем управления в различных отраслях техники, в том числе в автомобильной, аэрокосмической, медицинской отраслях, а также в роботизированных промышленных установках.
Массовое производство компонентов CAN десятками известных производителей тиражами в десятки миллионов штук сделала технологию достаточно дешевой.
В качестве международного стандарта протокол CAN был признан в 1993г-ISO 11898.
Протокол отличается помехоустойчивостью и обладает следующими возможностями:
Распределенный доступ абонентов в сеть с неразрушающим арбитражем,
Обнаружение ошибок при передаче и информирование передатчика и получателей о них,
Возможность подключения в сеть дополнительных абонентов без уточнения ПО существующих, из-за оригинальной системы адресации сообщений.
Протокол CAN обеспечивает пользователю два коммуникационных сервиса: посылку сообщений (передача кадра данных) и запрос на сообщение (удаленный запрос на передачу или remote transmission request , RTR). Другие сервисы: сообщения об ошибках, повтор передачи после обнаружения ошибки и т.п. является для пользователя прозрачным, т.е. микросхемы CAN выполняют эти действия автоматически. В отличие от MILSTD1553В, где эти функции выполняются ПО прикладного уровня. В CAN четко просматривается физический и канальный уровни семиуровневой OSI. Верхние уровни OSI объединены и программируются пользователем.
Физический уровень сети CAN
Топология сети CAN - шина. Подключение абонентов к линии передачи без шлейфов. Физический уровень реализуется в виде трех проводов. Два сигнальных - экранированная витая пара, и один общий. Возможно использование неэкранированных параллельных проводов, однако при этом вероятность искажения кадров повышается в 50 раз. Скорость передачи информации до 1 Мбит/с, при длине линии 50 - 60 м. С увеличением длины линии допустимая скорость передачи падает. При длине линии 1000 метров скорость передачи 50 - 60 кбит/с поэтому CAN допускает программирование скорости обмена от 10 кбит/с до 1 Мбит/с. Наилучшая помехозащищенность достигается при волновом сопротивлении линии 120 ом.
Возможна реализация физического уровня на оптоволокне, в радиоканале, в ИК канале.
Формат кадров
Обмен информацией между узлами осуществляется кадрами переменного размера до 108 бит. При этом кадр начинается стартовым битом и идентификатором в 11 бит, длина поля данных может варьироваться от 0 до 8 байт. Сегмент контрольной суммы CRS занимает 15 бит. Обращает на себя внимание само поле данных - не более 8 байт. Это обеспечивает малое время задержки при передаче с одной стороны, а с другой стороны является достаточным для тех задач управления, которые решает сеть CAN. При необходимости длинное сообщение может быть фрагментировано на несколько коротких.
Общее количество CAN узлов в сети логически не ограничивается и имеются только ограничения, связанные с числом нагрузок на электронику передатчиков. Для передатчиков одного из типов число узлов в сети может достигать значения 110.
0-64 бит поля данных
Б


 ит
RTR
6 бит поля управления 3 бит поля
подтверждения
ит
RTR
6 бит поля управления 3 бит поля
подтверждения
. |
|
|
|
|
|
|
|
|
|
. |
|
. |
|
|
|
. |
|
|
… |
... |
|
|
|
|
|
|
|
|
. |
|



С тартовый
бит 15 бит поле CRS
тартовый
бит 15 бит поле CRS
11 бит идентификатора 7 бит поле конца кадра
Распределенный доступ абонентов в сети CAN
В отличии от сети MILSTD1553B, сеть CAN имеет не централизованный, а распределенный доступ абонентов на шину, т.е. передача может быть инициирована любым узлом сети CAN при условии свободной шины. Поэтому после мониторинга шины передача может быть начата одновременно несколькими узлами сети, т.е. возможно возникновение столкновении сообщений - коллизий (как в Ethernet). Каждый начавший передачу узел осуществляет мониторинг поля идентификатора и бита RTR, находящиеся в заголовках кадра.
Идентификатор передается в последовательности от старшего бита к младшему. Доминирующим уровнем принят логический 0. Одновременная передача по сети (столкновение) бита с доминирующим уровнем (лог.0)и рецессивным уровнем (лог.1) дает в результате уровень логического нуля. Столкновение бит одинакового логического уровня дает в результате сигнал на шине того же логического уровня.
В процессе передачи «поля арбитража» - идентификатора + RTR, каждый передатчик проверяет текущий уровень на шине и сравнивает его с тем значением уровня, который он только что отправил в шину. Как только одним из передающих узлов будет обнаружено, что он передал лог.1 ,а на шине она превратилась в лог.0, он поймет, что его «перешибло» более приоритетное сообщение и ему надо уступать - прекращать свою передачу, так как его сообщение имеет меньший приоритет из сообщений начавших передачу узлов. Таким образом, арбитраж при выходе на шину осуществляется не по приоритету передающего узла, а по приоритету передающегося сообщения, который заключен в его идентификаторе.
Узел 1 0 1 0 1 1 0 1 1 0 1 0 0
Узел 2 0 1 0 1 1 0 1 1 1
На линии 0 1 0 1 1 0 1 1 0 1 0 0
Таким образом, приоритетным в сети при столкновениях сообщений является сообщение с наименьшим номером. Чем больше нулей в старших разрядах идентификатора, тем выше приоритет сообщения.
После освобождения шины попытка передачи менее приоритетного сообщения может быть повторена.
Обеспечение надежности передачи
В отличие от многих других коммуникационных технологий, использующих принцип подтверждения (квитирования) факта получения узлом адресованного ему сообщения за требуемый интервал времени, в стандарте CAN подтверждения получения индивидуально узлом отсутствуют, и сообщается лишь о появлении кадров с ошибкой передачи, а также факт, что хотя бы один узел сообщение принял. Для этого используется кадр сообщения об ошибке, а также бит подтверждения (ASK поле) принятия сообщения. Получив кадр сообщения об ошибке, передающий узел повторяет передачу исходного сообщения. Таким образом, имеет место решающая обратная связь при передаче данных.
При появлении сообщения об ошибках переданные ошибочные сообщения уничтожаются во всех узлах сети. Имеется счетчик переданных ошибочных сообщений. Переполнение счетчика является основанием для запрета узлу передавать сообщения.
Поле подтверждения передачи работает следующим образом. Передающий узел посылает в этом поле рецессивный бит. Если приемник принял сообщение правильное (подтверждается контрольной суммой), то он устанавливает в это поле бит доминирующего уровня, который по определению «перешибает» рецессивный уровень, передатчик читает значение этого бита прямо в процессе передачи и понимает, что в случае наличия доминирующего бита в этом поле, хотя бы один узел принял сообщение правильно.
Необходимость резервирования элементов и ЛПИ определяется разработчиком сети и осуществляется, при необходимости, вне рамок протокола CAN.
Адресация сообщений в CAN
В протоколе CAN отсутствует прямая адресация сообщений по уникальному адресу абонента.
Имеется идентификатор сообщения, который определяет приоритет и тип информации сообщения. При передаче сообщение получают все абоненты и проверяют тип сообщения. Абонент берет в обработку только тот тип сообщения, идентификатор которого «зашит» у него. Каждый абонент может обрабатывать до 15ти типов сообщений.
Таким образом, в CAN имеется возможность одновременной передачи сообщений нескольким абонентам, в том числе синхросигналов.
Кроме того новые узлы, добавленные в сеть, не меняют ПО существующих узлов, если они являются потребителями или производителями имеющихся в сети типов сообщений.
8-1
Лекция 8. Сеть Space Wire
Физический уровень сети
Сетевая технология Space Wire [SW] предназначена для создания вычислительных коммуникационных сетей на борту летальных и космических аппаратов. SW продвигается NASA.
Основные отличия этой сети в высокой скорости и низкой мощности сигналов передачи, надежной синхронизации сообщений с выделенной линией синхросигналов, несколько путей передачи информации между абонентами за счет ячеистой топологии сети. Для каждого пакета данных может быть свой маршрут. Оригинальна и очень быстра буферная маршрутизация типа “на лету” или “червячный ход”.
Стандарт SW основывается на двух коммерческих стандартах – IEEE 1355-1995 и ANSI/TIA/EIA-644 и определяет средства физического уровня и протокол надежной передачи данных по высокоскоростным дуплексным каналам. Стандарт принят в 2003 году. Сейчас подготовлена вторая версия.
Сеть SW состоит из узлов(абонентов) и стоящих за ними host-устройств: компьютеров, коммутирующих маршрутизаторов и ЛПИ, которая называется DS-линки.
Скорость передачи данных ~400 Мбит/c на расстоянии 10 м. и 100 Мбит/c на расстоянии в 30 м. Дальность передачи можно увеличивать пропорционально с уменьшением скорости передачи до 2 Мбит/c. В перспективе 2.5 гигабайт/сeк на оптоволокне и расстоянии в сотни метров.
Возможное удвоение, учетверение и т.д. скорости передачи за счет удвоения, учетверения и т.д. числа поделенных линков – ЛПИ между узлами при параллельной передачи по ним информации.
Одно из решающих достоинств стандарта – компактность его реализации в СБИС. Упомянутые скоростные характеристики получаются уже на технологии уровня 0.25 мкм.
Кабель ЛПИ сети – восьмипроводной из четырех экранированных витых пар. D,S в два направления. К кабелю предъявляются жесткие требования к разбросу характеристик.
Кодирование бит информации. Синхронизация.
ЛПИ SW – это последовательные дуплексные каналы (DS- линки) с кодированием бит информации типа NRZ. Стандарт SW передает битовый поток путем кодирования двух сигналов по двум линиям – сигналов данных (D), и сигнала строба (S) – сигналов синхронизирующих импульсов. Сигнал данных повторяет значение бита данных, т.е. имеет высокий потенциал для логической “1” и низкий для логического “0”. Сигнал строба меняет свое состояние каждый раз, когда состояние линии данных остается неизменным для последующего бита.
8-2
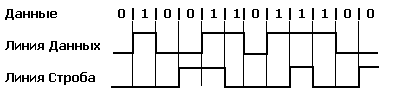
Таким образом, в DS кодировании обеспечивается синхронизация приемника и передатчика даже при приеме большого количества последовательных бит, имеющих одинаковое значение. При этом сигнал строба передается с той же частотой что и сигнал данных (в каждом такте меняется либо один сигнал, либо другой), тогда как в самосинхронизирующемся манчестерском коде синхронизация связанна с удвоением частоты передачи. Там 1 МГц это допустимо, здесь же 400 МГц, и этого допускать нельзя.
В результате DS кодирование позволяет передавать данные в большом диапазоне скоростей без предварительного согласования их между приемником и передатчиком это позволяет связывать в сеть разноскоростные устройства.
Битовый поток образует сообщения двух типов: данных и управления. Тип сообщения определяется в каждом слове в зависимости от значения флага «данные/управление». Данные передаются младшими разрядами вперед. Структура слова данных приведена ниже:
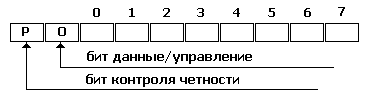
Таким образом, байт данных кодируется в 10 бит. Управляющее слово состоит из бита контроля четности, бита флага “данные управления” со значением “1” и для слова управления и двух бит кода управления (таким образом, всего управляющих слов 4).
Терминальные узлы и маршрутизаторы сети SW.
Структура пакетов SW.
Сеть SW состоит из терминальных узлов, линий информации – линков и коммутирующих маршрутизаторов. Терминальные узлы могут соединяться через маршрутизаторы. Сеть работает на принципе динамической маршрутизации. При этом пакеты передаются от узла к узлу через несколько маршрутизаторов. Для каждого пакета данных устанавливается свой маршрут. Пакеты передаются по сети, образуя различные виртуальные каналы на базе одной сети физических каналов.
8-3
Узлы – абоненты сети – устройства, передающие или принимающие потоки данных. Узел имеет несколько портов и интерфейс с источником данных – хост устройством (компьютером).
Узел абонент отличается от маршрутизатора – коммутатора тем, что трансляция данных между его линк-портами возможна только через ПО его хост компьютера.
Таким образом, сеть SW предусматривает двунаправленную передачу информации с коммутацией пакетов и с установкой логического соединения. Данные терминальных узлов, предназначенные для передачи делятся на пакеты, которые и передаются по сети друг за другом.
Разбиение данных на пакеты для прикладного уровня является прозрачным, т.е. не видимым.
Структура пакетов.
Пакет состоит из адреса назначения, данных и маркера конца пакета.
Адрес назначения состоит из нескольких идентификаторов назначения, но может быть и пустым, т.е. не содержать, ни одного идентификатора. Размер адреса назначения не ограничивается. Пустые адреса назначения могут применяться в сетях, организованных на соединениях типа ”точка-точка”. Использование адреса назначения из нескольких идентификаторов назначения поддерживает маршрутизацию пакета. При адресации указывается либо маршрут, либо логический адрес (почтовый).
Поле данных – полезная нагрузка пакета, может содержать одно или несколько слов данных. Размер поля данных стандартом не ограничивается. Его ограничивает прикладная задача абонента.
Пустое поле данных является ошибочной ситуацией.
Слово данных следующее за маркером конца пакета, воспринимается как начало следующего пакета.
Порядок доступа абонентов в сеть.
Каждому терминальному узлу и маршрутизатору в сети SW рекомендуется иметь буфер данных не менее 56 байт, который может быть организован разными способами. Рекомендуются FIFO- буферы. Отсутствие буфера тоже возможно, если узел или маршрутизатор оборудованы для маршрутизации типа “червячный ход” (коммутация на лету, on the fly).
Передающая сторона не должна передавать данные пока не готово логическое соединение, т.е. другая сторона не готова принимать их (иначе могут быть потери пакетов). При подготовке к передаче, стороны обмениваются служебными словами.
Для реализации механизма приема на каждой стороне необходимо иметь два счетчика: счетчик числа слов, разрешенных к передаче и счетчик числа слов, для приема которых есть свободное пространство в буфере приемника.
8-4
Значение счетчика приемника уменьшается на 1 при приеме каждого информационного слова.
После того, как соединение установлено, оно поддерживается постоянной передачей по нему слов данных, управляющих слов, а при отсутствии (паузе) – NULL маркеров. Если сигналы в канале не изменяются в течении 850 мс – это рассматривается как разрыв соединения.
Разрыв соединения производится по команде хоста. Установление соединения возможно автоматически без участия соответствующего хоста по умолчанию кода NULL, после чего абонент стартует и входит в соединение. Частый разрыв и повторное установление соединения – ситуация штатная и полезная в тех жестких помеховых условиях, в которых работает сеть на космических аппаратах.
Маршрутизация типа “Червячный ход”
При маршрутизации “на-лету“ маршрутизатор уже в начале получения заголовка сообщения на выходном порту очень быстро определяет и коммутирует номер выходного порта для него. Пакет сразу же без какой-либо буферизации, обычно для сетей с коммутацией пакетов, направляется на уже скоммутированный выходной порт. При коммутации “на лету” отпадает необходимость в буферной памяти маршрутизатора, ускоряется процесс передачи. Такая маршрутизация напоминает процесс продвижения червяка в яблоке и получила название “червячный ход”.
Если требуемый выходной порт занят, то при обычной коммутации пакетов пакет задерживается в буфере. При маршрутизации “на лету” в этом случае прием сообщения задерживается до тех пор, пока не освободится требуемый выходной порт. Приостанов передачи/приема реализуется при помощи механизма обмена служебными сообщениями для управления потоком.
Путевая (маршрутная) и логическая адресация пакетов
При путевой адресации адрес назначения пакета – последовательность номеров выходных портов маршрутизаторов, через которые должен пройти пакет. Такой способ характеризуется относительной простотой маршрутизатора и быстрой обработкой пакета. При прохождении пакета каждый маршрутизатор читает адрес – первый байт заголовка и направляет пакет на указанный в нем выходной порт, при этом эта часть адреса отбрасывается.
Следующий маршрутизатор также читает первый байт оставшейся части адреса и направляет пакет на указанный в нем выходной порт и так далее. При такой работе основная работа ложится на узел передатчик (его ПО), который составляет такой маршрутный составной адрес.
8-5
При логической адресации каждый узел сети получает свой уникальный логический адрес. Когда отправитель направляет свое сообщение, он в заголовке пакета указывает адрес получателя. Каждый из маршрутизаторов имеет у себя таблицу маршрутизации, по которой он определяет выходной порт для направления пакета ближайшему по маршруту хосту либо маршрутизатору.
Данный способ напоминает маршрутизацию в больших сетях.
В СТС целесообразно использовать маршрутизацию по первому варианту. Она быстра и больше соответствует “червячному ходу”.
Имеются комбинированные разновидности адресации, объединяющие оба описанных способа.
Сравнительные характеристики бортовых сетевых интерфейсов
Параметр
CAN
ГОСТ Р52070-2003
Space Wire
1
3
4
5
Среда передачи. Способ подключения
абонентов.
Витая пара или
плоская пара. Три провода (2 сигнальных,
1 общий). Безшлейфовый к шине. Возможно
оптоволокно, радио, ИК.
Витая пара
проводов в экране. Безшлейфовый или
шлейфовый с согласующим трансформатором
к шине.
9- проводной
кабель, состоящий из четырех витых
пар проводом (каждая витая пара в
своем экране) для дуплексной связи с
DS.
Вид сигналов (кодирование бит)
Потенциальное
кодирование. Перепад напряжения 0.2
до +12 В
Импульсное
кодирование. Биполярный фазоманипулированный
самосинхронизирующий код с уровнем
сигнала от 6 до 9 В. (манчестерский код)
Потенциальное
кодирование. Кодирование по двум
линиям: данные и строб (DS).
Перепад дифференциального напряжения
(до 350 мВ) код NRZ
Длина линий связи и скорость передачи
До 50 м*. До 1Мб/c
До 400 м**. До 1Мб/c
До 10 м*. До 400 Мб/c До
30 м. До 100 Мб/c
Структура сообщения
Сообщение объемом
до 111 бит включая до 8 битов полезной
информации.
Сообщение объемом
до 660 бит, включая до 64 байтов полезной
информации
Формат данных
стандартом Space
Ware
не ограничивается.
Метод доступа абонентов на линию
Распределенный.
Все узлы могут начать передачу при
свободной линии. При столкновении
пакетов прекращают передачу узлы
низшего приоритета.
Централизованный
под управлением контроллера. Запрос
на передачу в ответном слове при
опросе контроллером ОУ.
Ячеистая топология
маршрутизаторами. Виртуальный канал
с установкой логического соединения.
Способ адресации абонентов
Идентификатором
по типу информации. Один абонент может
понимать до 15 типов.
1. Адресу абонента 2.
Всем абонентам
1. Маршрутный 2.
По адресу абонента 3.
Безадресный (точка-точка)
Количество абонентов на линии
Логических
ограничений нет, но загрузочной
способностью до 110.
До 32
До 32***
Обеспечение надежности передачи
информации
Аппаратный
контроль. Поле CRS.
Передача ответного сообщения только
при наличии ошибки. Повторение передачи
в этом случае. Резервирование не
предусмотрено. Наличие поля ответа
в структуре сообщения.
Аппаратный
контроль. Бит четности. Передача
ответного слова с информацией о
наличии или отсутствии ошибки.
Повторение передачи ГОСТ не предусмотрено
(на усмотрение пользователя).
Предусмотрено резервирование.
Аппаратный
контроль. Бит четности на каждый байт.
Возможность передачи информации
одному абоненту различными путями.
Повторение передачи при ошибке.
Резервное не предусмотрено.
*С увеличением длины скорость передачи уменьшается.
**Возможно увеличение до 400 м без снижения скорости передачи за счет установки дополнительных трансляторов.
***При использовании одного маршрутизатора.