

2.2. Измерительные схемы датчиков
 .Вариации импеданса
Zд
ЧЭ, связанные с изменениями измеряемой
величины x,
могут быть преобразованы в электрический
сигнал путем включения ЧЭ в измерительную
схему,
питаемую источником напряжения E
или тока I.
Измерительные схемы, называемые
также схемами формирования сигналов,
предназначены для преобразования
информации, полученной ЧЭ в
процессе измерения в электрический
сигнал (в форме вариаций
амплитуды, фазы или частоты).
.Вариации импеданса
Zд
ЧЭ, связанные с изменениями измеряемой
величины x,
могут быть преобразованы в электрический
сигнал путем включения ЧЭ в измерительную
схему,
питаемую источником напряжения E
или тока I.
Измерительные схемы, называемые
также схемами формирования сигналов,
предназначены для преобразования
информации, полученной ЧЭ в
процессе измерения в электрический
сигнал (в форме вариаций
амплитуды, фазы или частоты).
Наиболее распространены два типа измерительных схем датчиков: параметрические и генераторные.
В первом случае, функция преобразования измерительной схемы описывается выражением вида:
Uвыx = f(x) = E F (Zд, Zс )
Во втором: wвыx (x) = G(Zд, Zс),
Здесь Zс - собственный импеданс измерительной схемы, E - напряжение питания, wвыx - частота выходного сигнала.
Потенциометрическая схема (рис. 2.25) в измерительных цепях датчиков используется наиболее часто. ЧЭ Zд включается последовательно с дополнительным элементом Zс, образуя делитель напряжения. Главным достоинством потенциометрической схемы является простота, главным недостатком - чувствительность к паразитным помехам.
В мостовой схеме, являющейся модификацией потенциометрической и содержащей два дифференциально включенных делителя, удается существенно снизить влияние внешних факторов.
 Чувствительность
датчика Sд,
использующего измерительные схемы
этого типа определяется выражением:
Чувствительность
датчика Sд,
использующего измерительные схемы
этого типа определяется выражением:
Sд = DUвыx/Dx = (DUвыx/DZд)´( DZд/Dx) = Sс S
где DUвыx/DZд = Sс - чувствительность измерительной схемы, DZд/Dx = S - чувствительность ЧЭ.
В генераторных схемах (рис. 2.26), вариации импеданса ЧЭ вызывают изменение частоты генерации. В этом случае, выходной сигнал является частотно-модулированным. Такая схема обеспечивает хорошую защиту от паразитных влияний, особенно в случае использования длинных линий связи. Чувствительность генераторной схемы Sс = Dwвыx/DZд и тогда, также как и в предыдущем случае, получим:
Sд = Dwвыx/Dх = Sс S
Функция преобразования датчика будет линейна, если чувствительность измерительной схемы Sс не зависит от х.
2.2.1. Параметрические схемы
В параметрических схемах осуществляется преобразование импеданса ЧЭ или группы ЧЭ в электрический сигнал в форме напряжения или тока. Параметрическая схема может состоять исключительно из ЧЭ или включать наряду с ними и дополнительные элементы, корректирующие ее функцию преобразования. Среди всех параметрических схем наибольшее применение нашли потенциометрические и мостовые измерительные схемы.
Рассмотрим классическую потенциометрическую схему с резистивными элементами. ЧЭ Rд включен последовательно с резистором постоянного сопротивления R1 (рис. 2.27). Питание осуществляется от источника ЭДС E с внутренним сопротивлением R.
Выходное напряжение схемы Uвых, измеряемое прибором с собственным сопротивлением Rн (измерительный усилитель, вольтметр) будет равно:
![]()
 Общепринятым
требованием при построении измерительных
схем является условие Rн>>Rд.
В этом случае, напряжение Uвых
не зависит от нагрузки и является
нелинейной функцией:
Общепринятым
требованием при построении измерительных
схем является условие Rн>>Rд.
В этом случае, напряжение Uвых
не зависит от нагрузки и является
нелинейной функцией:
![]()
В большинстве случаев требуется, чтобы вариации напряжения Uвыx были пропорциональны вариациям сопротивлений ЧЭ Rд. Линеаризация потенциометрических схем достигается двумя основными способами: работой в малой (линейной) зоне и использованием дифференциального включения ЧЭ.
Работа в малой зоне предполагает, что сопротивление ЧЭ меняется от Rд0 до (Rд0 + DRд) вызывая изменения напряжения Uвыx от Uвыx0 до (Uвыx0 + DUвыx). Опуская промежуточные выкладки, получим:
![]()
При условии, что DRд << Rд0 + R1 + R с точностью до малых величин второго порядка имеем
![]()
Чувствительность измерительной схемы Sс = DUвыx/DRд максимальна, если выбрать R + R1 = Rд0; в этом случае функция преобразования будет равна:
![]()
 Дифференциальное
включение
образуется заменой постоянного
сопротивления R1
вторым ЧЭ, идентичным
первому, но с вариациями номинала
обратного знака R1=
Rд0
- DRд.
Тогда при включении этих двух ЧЭ навстречу
друг другу получим так называемую
двухтактную
схему. (Это могут быть, например, два
одинаковых ТР, подвергающихся
равным по величине, но противоположным
по знаку деформациям).
Дифференциальное
включение
образуется заменой постоянного
сопротивления R1
вторым ЧЭ, идентичным
первому, но с вариациями номинала
обратного знака R1=
Rд0
- DRд.
Тогда при включении этих двух ЧЭ навстречу
друг другу получим так называемую
двухтактную
схему. (Это могут быть, например, два
одинаковых ТР, подвергающихся
равным по величине, но противоположным
по знаку деформациям).
Тогда
![]()
откуда функция преобразования
![]()
Дифференциальное включение ЧЭ позволяет скомпенсировать влияние многих факторов. Рассмотрим потенциометрическую схему с двумя ЧЭ Rд1 и Rд2, вариации которых вызывают соответствующие приращения DUвыx1 и DUвыx2 измеряемой величины (рис. 2.28). Обозначено g - величина влияющего фактора, а Dg - ее приращение, одинаковое для двух ЧЭ.
До воздействия измеряемой величины имеем
x1 = x2, g = g0, Rд1 = Rд2 = Rд0, Uвыx = Uвыx0 =E/2
После воздействия измеряемой величины
Rд1 = Rд0 +DRд1, Rд2 = Rд0 +DRд2,
где DRд1 = Sg Dg + S Dx1, DRд2 = Sg Dg + S Dx2
Здесь Sg = DRд/Dg - чувствительность каждого ЧЭ к влияющему фактору, S =DRд/Dx - их чувствительность к измеряемой величине. Выходное напряжение равно Uвыx(x) = Uвыx0 +DUвыx. Полагая R << Rд0 получим:
![]()
Если первый из ЧЭ не подвергается воздействию измеряемой величины ( Dx1 = 0), то

![]()
при условии, что S Dx2 << Rд0
При совместных измерениях, когда Dx = Dx2 = - Dx1, имеем:
![]()
Следовательно, при дифференциальном включении влияющие факторы в функции преобразования представлены намного слабее, чем измеряемая величина.
Недостатком потенциометрической схемы является наличие в выходном сигнале постоянной составляющей, не содержащей полезной информации. Для выделения полезной DUвыx составляющей сигнала можно использовать емкостную связь между схемой и нагрузкой (рис. 2.27). В этом случае, конденсатор C и внутреннее сопротивление Rн образуют фильтр верхних частот.
 Для
устранения постоянной составляющей
используют также потенциометрическую
схему с симметричным питанием или
мостовую схему.
Для
устранения постоянной составляющей
используют также потенциометрическую
схему с симметричным питанием или
мостовую схему.
Мостовая схема представляет собой двойной потенциометр с дифференциальным включением. Ее основное преимущество заключается в большей точности и меньшей чувствительности к влияющим факторам, чем у потенциометрической схемы.
В зависимости от типа ЧЭ мостовые схемы получили собственные имена: мост Вина, мост Саути, мост Максвелла и др. (Два первых представлены на рис. 2.29). Наиболее известна резистивная мостовая схема Уитстона (рис. 2.30). Нагрузка Rн включается в диагональ моста. Мост находится в равновесии, когда напряжения в точках a и b равны ua= ub, т.е. iab = 0. Это условие достигается известным соотношением:
 R1
R4
=
R2 R3
R1
R4
=
R2 R3
Условие равновесия зависит только от сопротивления плеч моста, оно не зависит от внутреннего сопротивления источника питания R и сопротивления нагрузки Rн.
Обычно мост питают источником, внутреннее сопротивление которого мало: R << R1, R2, R3, R4, Rн. В идеальном случае R = 0 выражение для тока iab имеет вид [ ]:
![]()
Когда нагрузка (осциллограф, вольтметр или усилитель) имеет большое входное сопротивление Rн >> R1, R2, R3, R4, получим:
 и
и

Зависимость Uвых = f(R) описывает функцию преобразования мостовой схемы Уитстона. Чувствительность моста Sи максимальна в положении равновесия, когда R1 = R2 и R3 = R4. Для упрощения процедуры измерений часто выбирают сопротивления плеч моста одинаковыми: R1 = R2 = R3 = R4 = R0.
В общем случае, в мосте может быть одно-, два- и четыре рабочих плеча. Для схемы с четырьмя рабочими плечами (т.е. в каждое плечо включен ЧЭ) их вариации равны соответственно:
R1 = R0 + DR1, R2 = R0 + DR2, R3 = R0 + DR3, R4 = R0 + DR4
Тогда, напряжение разбаланса будет определяться соответствующей подстановкой значений R1, R2, R3, R4 в выражение для функции преобразования. Существенно, что это напряжение является нелинейной функцией вызвавших его изменений сопротивлений плеч моста. Так, если в схеме используется только один ЧЭ, например, R2, то
![]()
На рис. 2.31 представлена зависимость отношения Uвых/E от изменения одного из плеч DR/R0 моста, изначально находившегося в равновесии [ ]. Эта зависимость линейна в относительно узком диапазоне изменения R0 в обе стороны от положения равновесия. На практике ограничиваются |DR/R0| £ 0,1. Когда сопротивление источника R того же порядка, что и сопротивления плеч моста, а Rн намного больше, напряжение разбаланса можно выразить формулой

При прочих равных условиях увеличение чувствительности Sи мостовой схемы требует снижения сопротивления источника R.
Улучшение функции преобразования мостовой схемы заключается в линеаризации характеристики и компенсации влияющих факторов. Так же как и в потенциометрических схемах наиболее известны два способа: работа на малом участке характеристики и дифференциальное включение ЧЭ.
В первом случае, мост из четырех одинаковых ЧЭ R0, вариации которых DRi малы (DRi << R0) с точностью до величины второго порядка линеен близ положения равновесия:
![]()
Это соотношение отражает очень важное свойство моста, у которого все плечи в положении равновесия одинаковы: идентичные изменения сопротивлений в двух смежных плечах не приводят к разбалансу моста. Данное свойство позволяет компенсировать воздействия влияющих факторов, в том числе температурных изменений.
При дифференциальном включении плечи моста образованы из четырех одинаковых ЧЭ, изменения номиналов которых в смежных плечах попарно противоположны, т. е:
DR1 = - DR2 и DR3 = - DR4
Тогда, при линейных ЧЭ напряжение разбаланса будет строго линейно зависеть от изменений этих сопротивлений:

и при DR2 = DR3 = DR получим функцию преобразования в виде:
![]()
Если же ЧЭ имеют нелинейные характеристики, то их дифференциальное включение в мостовую схему уже не обеспечит строгой линейности функции преобразования. В этом случае часто говорят о квазилинейности этой функции, что вполне достаточно для инженерных расчетов. Однако такая схема не обеспечит полной компенсации влияющих факторов. Так, для схемы моста с четырьмя идентичными ЧЭ имеем
DR1 = - SDx + Sg Dg, DR2 = S Dx + SgDg, DR3 = SDx + Sg Dg, DR4 = - S Dx + SgDg
и общее выражение для Uвых приводится к виду
![]()
Видно, что напряжение Uвых пропорционально изменениям только измеряемой величины, но чувствительность схемы Sд = Uвых/Dx зависит от влияющей величины g из-за непостоянства чувствительности Sg датчика при воздействии величины g.
 Чаще
всего влияющим фактором является
температура
Т. Ее вариации
Dg
= DТ
=Т - Т0,
где Т0
- значение температуры при равновесии
моста, когда сопротивление каждого ЧЭ
равно R0.
Чувствительность Sg
= DR/DТ
= aRR0,
aR
-
температурный коэффициент сопротивления
ЧЭ. В этом случае напряжение разбаланса
Чаще
всего влияющим фактором является
температура
Т. Ее вариации
Dg
= DТ
=Т - Т0,
где Т0
- значение температуры при равновесии
моста, когда сопротивление каждого ЧЭ
равно R0.
Чувствительность Sg
= DR/DТ
= aRR0,
aR
-
температурный коэффициент сопротивления
ЧЭ. В этом случае напряжение разбаланса
![]()
Линеаризовать функцию преобразования в этом случае можно, включив последовательно с источником питания температурно-зависимые резисторы с сопротивлением R/2 (рис. 3.32), вариации которых с температурой изменяют напряжение питания U моста таким образом, что чувствительность всей схемы остается постоянной. Так, если в диапазоне температур, в которых используется схема, тепловые вариации вызывают квазилинейные изменения сопротивлений схемы и источника вида: Rд(T) = Rд0 (1 + aR DT) и S(T) = S0 (1 + b DT)
то, напряжение Uвых не зависит от Т, если для сопротивления источника R справедлива зависимость
![]()
здесь aR и a - температурные коэффициенты сопротивлений (ТКС) ЧЭ и источника, b - температурный коэффициент чувствительности (ТКЧ) ЧЭ.
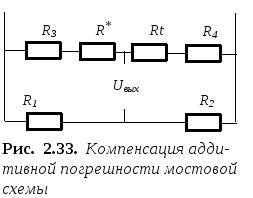
Номинальные значения ЧЭ во всех плечах моста, так же, как их температурные коэффициенты, никогда не оказываются строго идентичными. Поэтому, даже в отсутствие измеряемой величины, наблюдается отличное от нуля напряжение разбаланса, изменяющееся в функции температуры. Это напряжение называется сдвигом (или дрейфом) нуля. Оно образует аддитивную погрешность, входящую в результат измерения.
Коррекция дрейфа нуля осуществляется включением в смежные плечи моста двух резисторов: Rt и R* (рис. 2.33). Сопротивление первого зависит от температуры, так, что знак изменения сопротивления противоположен знаку ЧЭ. Сопротивление второго не зависит от температуры и служит для начального симметрирования моста.