

3.1.2.1. Резольверы
 Резольвер
- это четырехобмоточная двух- и более
полюсная электрическая машина,
использующая индукционное взаимодействие
роторных и статорных обмоток. (Р
применяются в качестве угловых ЭДП, а
также в качестве решающих устройств в
аналоговых системах автоматики).
Резольвер
- это четырехобмоточная двух- и более
полюсная электрическая машина,
использующая индукционное взаимодействие
роторных и статорных обмоток. (Р
применяются в качестве угловых ЭДП, а
также в качестве решающих устройств в
аналоговых системах автоматики).
В зависимости от формы выходного сигнала выделяют три основных типа Р: синусно-косинусный; линейный и Р-построитель. Для получения Р различных типов можно использовать одну и ту же машину с двумя обмотками на статоре и двумя на роторе при различных способах их включения.
 Конструктивно Р
выполнен подобно асинхронному двигателю
с фазным
ротором, который, также как и статор,
представляет собой многополюсный
сердечник из листов электротехнической
стали (или пермаллоя). В пазах ротора и
статора (или между зубьями магнитопровода)
размещены по две распределенные обмотки,
сдвинутые на 900
друг относительно друга. В общем случае,
пазов может быть больше, чем
полюсов. Концы обмоток выводятся на
клеммник, причем статорных - непосредственно,
а роторных - посредством 4-х токосъемных
колец ротора и щеток. На рис. 3.12а
представлена обмотка синусной фазы с
осью S,
а также магнитопровод с 2 парами полюсов
и тремя пазами (рис. 3.12б). Эта схема
адекватна конструкции с, например, 32
парами полюсов и 48 пазами.
Конструктивно Р
выполнен подобно асинхронному двигателю
с фазным
ротором, который, также как и статор,
представляет собой многополюсный
сердечник из листов электротехнической
стали (или пермаллоя). В пазах ротора и
статора (или между зубьями магнитопровода)
размещены по две распределенные обмотки,
сдвинутые на 900
друг относительно друга. В общем случае,
пазов может быть больше, чем
полюсов. Концы обмоток выводятся на
клеммник, причем статорных - непосредственно,
а роторных - посредством 4-х токосъемных
колец ротора и щеток. На рис. 3.12а
представлена обмотка синусной фазы с
осью S,
а также магнитопровод с 2 парами полюсов
и тремя пазами (рис. 3.12б). Эта схема
адекватна конструкции с, например, 32
парами полюсов и 48 пазами.
Выпускаются также бесконтактные Р с подключением роторных обмоток посредством плоских пружин, с углом поворота до 7000 и Р со вспомогательными переходными трансформаторами.
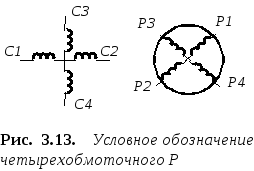
Схема Р показана на рис. 3.13. Обмотки С1С2 и С3С4 называются главной и квадратурной обмотками статора, а Р1Р2 и Р3Р4 - синусной и косинусной обмотками ротора.
При подключении обмотки возбуждения (главной обмотки Р) к сети переменного тока в машине возникает продольный магнитный поток Фпр пульсирующий с частотой сети. Этот поток в обмотках ротора индуцирует две ЭДС Eс0 и Eк0, частота которых равна частоте сети, а действующие значения зависят от положения ротора относительно статора.
Каждая замкнутая обмотка Р эквивалентна магниту, представляемому в виде пары полюсов S-N.
В многополюсных машинах с p парами полюсов за один полный поворот ротора изменение магнитного поля (период изменения выходного сигнала) соответствует пространственному углу q* = 360p0. Этот принцип, получивший название «электрической редукции» позволяет существенно повысить точность Р, и в настоящее время является общепринятым. В соответствии с этим принципом, фаза Uвых меняется в р раз чаще, чем фаза угла поворота ротора. «Электрические» градусы qэл, Uвых связаны с «геометрическими» градусами qгеом угла поворота соотношением qэл = p qгеом (рис. 3.14).
 В
Р число пазов (или зубцов) полюса, а также
распределение обмоток в пазах (т.е.
распределение магнитного потока на
полюсе) определяют, насколько точно
выходной сигнал соответствует функции
синуса угла. Так, если в двухполюсном
Р число пазов (зубцов) статора zс
= 20, а число пазов
(зубцов) ротора zр
= 12, то в выходном сигнале будут
значительно ослаблены 3 и 5-ая гармоники.
С той же целью в многополюсном
Р имеющем p
пар полюсов должны быть выполнены на
роторе zр
= 12 p зубцов,
а на статоре zс
= 20 p зубцов.
В
Р число пазов (или зубцов) полюса, а также
распределение обмоток в пазах (т.е.
распределение магнитного потока на
полюсе) определяют, насколько точно
выходной сигнал соответствует функции
синуса угла. Так, если в двухполюсном
Р число пазов (зубцов) статора zс
= 20, а число пазов
(зубцов) ротора zр
= 12, то в выходном сигнале будут
значительно ослаблены 3 и 5-ая гармоники.
С той же целью в многополюсном
Р имеющем p
пар полюсов должны быть выполнены на
роторе zр
= 12 p зубцов,
а на статоре zс
= 20 p зубцов.
 Важным
достоинством Р является высокий уровень
выходного сигнала, достигающий 100%
величины напряжения возбуждения.
Важным
достоинством Р является высокий уровень
выходного сигнала, достигающий 100%
величины напряжения возбуждения.
В зависимости от характеристик обмоток и способа их соединения различают синусно-косинусную (СКР) и линейную (ЛР) схемы включения Р.
Сначала рассмотрим схемы СКР (рис. 3.15а). Для него формат выходных напряжений Uс и Uк записывается выражениями:
Uс = kс Uв sin (wt + a1) sin q,
Uк = kк Uв sin (wt +a2) cos q.
Здесь w - несущая частота Р (частота тока возбуждения), kс, kк - коэффициенты трансформации синусной и косинусной обмоток (они равны отношению числа эффективных витков соответствующей роторной обмотки к числу эффективных витков статорной), a1, a2 - фазовые сдвиги (погрешности намоток).
Информационное преобразование СКР описывается функцией вида U = f(q). На холостом ходу (т.е. без нагрузки) при kс = kк = k напряжения на обмотках равны соответствующим ЭДС (рис. 3.15б):
Uс0 = Eс0 = k Eв sin q;
Uк0 = Eк0 = k Eв cos q.
Здесь Eв - ЭДС обмотки возбуждения (частота тока - 400 ... 4000 Гц), q - угол поворота ротора относительно статора, k - коэффициент трансформации.
ЭДС обмотки возбуждения Eв определяется значением магнитного потока в этой обмотке:
Eв = 4,44 fв Nв Kв Фпр,
где fв - частота тока возбуждения, Nв, Kв - число витков и обмоточный коэффициент обмотки возбуждения.
В простейшей схеме включения Р, когда выходной сигнал снимается с синусной обмотки, его величина меняется в функции синуса угла поворота q.
Функция преобразования такого СКР в режиме холостого хода примет вид:
Eс0 = Uс max sin q = k Eв sin q.
(Например, при k = 1 и q = 300 получим Eс0 = Umax/2).
Реальный режим работы СКР отличен от режима холостого хода. Если к синусной обмотке подключить нагрузку Zнс то по обмотке потечет ток Iс:
Iс = Eс/(Zс + Zнс),
где Zс - сопротивление синусной обмотки.
При этом в соответствии с формулой Гопкинсона, магнитодвижущая сила (МДС) ротора Fс, вызванная током синусной обмотки Ic равна:
Fc = Фс Rmc = Iс Nс,
где Iс, Nс - ток в цепи и число витков синусной обмотки ротора, Фс - магнитный поток, наводимый в цепи синусной обмотки, Rmc - полное магнитное сопротивление синусной обмотки.
 Поскольку
ось этой МДС совпадает с осью синусной
фазы (рис. 3.16), ее можно представить в
виде векторной суммы двух составляющих
(по отношению к потоку возбуждения
статора Фв
= Фпр0):
продольной Fс
пр
= Fс
sin q
и поперечной
Fс поп
= Fс
cos q.
Поскольку
ось этой МДС совпадает с осью синусной
фазы (рис. 3.16), ее можно представить в
виде векторной суммы двух составляющих
(по отношению к потоку возбуждения
статора Фв
= Фпр0):
продольной Fс
пр
= Fс
sin q
и поперечной
Fс поп
= Fс
cos q.
Продольная составляющая МДС ротора создает в обмотке возбуждения статора компенсирующий ток, МДС которого Fк, также как и в двухобмоточном трансформаторе, компенсирует действие Fс пр. Результирующий продольный поток (Фпр = Фв - Fк/Rmc) индуцирует ЭДС в синусной обмотке:
Eс пр = k Eв sin q.
ЭДС обмотки возбуждения Eв вследствие размагничивающего действия Fк уменьшается, что приводит к уменьшению составляющей ЭДС синусной обмотки Eс пр: Eс пр < Eс0.
Поперечная составляющая МДС Fс поп создает в роторе поперечный поток Фпоп, относительно которого синусная обмотка является косинусной (см. рисунок) и в ней индуцируется ЭДС:
Eс поп = 4,44 fв Nс Kс Фпоп cos q = C Fc cos2 q,
где Kс - обмоточный коэффициент роторной синусной обмотки, С - константа.
Таким образом, при нагрузке в синусной обмотке кроме «информативной» ЭДС, пропорциональной синусу угла поворота, индуцируется ЭДС, пропорциональная току нагрузки и квадрату косинуса угла поворота. Эта составляющая существенно искажает синусный характер функции преобразования.
Eс = Eс пр + Eс поп = k Eв sin q + C Fc cos2 q.
Добавочная составляющая ЭДС вызывает появление погрешности, величина которой тем больше, чем меньше Zнс. Искажениям подвергаются как амплитуда, так и фаза сигнала Eпр, причем амплитудные искажения достигают 20% от Eс пр.
Аналогично, в косинусной обмотке индуцируется добавочная ЭДС, пропорциональная току нагрузки и квадрату синуса.
 Для
устранения амплитудных и фазовых
искажений сигнала Eс
используется
симметрирование
СКР, которое заключается в компенсации
поперечной
составляющей потока реакции ротора.
Для
устранения амплитудных и фазовых
искажений сигнала Eс
используется
симметрирование
СКР, которое заключается в компенсации
поперечной
составляющей потока реакции ротора.
Выделяют три способа симметрирования Р: первичное, вторичное и комбинированное.
 Первичное
симметрирование (рис.3.17) проводится с
использованием квадратурной обмотки
статора, к которой подключается
сопротивление Zк.
Ток, возникающий в замкнутом на нагрузку
контуре обмотки С3С4 создает поперечную
составляющую МДС Fк,
которая направлена противоположно
Fс поп:
Первичное
симметрирование (рис.3.17) проводится с
использованием квадратурной обмотки
статора, к которой подключается
сопротивление Zк.
Ток, возникающий в замкнутом на нагрузку
контуре обмотки С3С4 создает поперечную
составляющую МДС Fк,
которая направлена противоположно
Fс поп:
Fпоп = Fс поп - Fк.
Встречное направление векторов Fк и Fс поп обусловлено тем, что квадратурная обмотка относительно поперечного потока Фпоп представляет собой «вторичную» обмотку трансформатора, и ее МДС Fк направлена против МДС Fс поп «первичной» обмотки. Следовательно, результирующая МДС Fпоп будет значительно меньше МДС Fс поп,а значит, величина поперечного потока Фпоп и вызванная им погрешность также резко уменьшатся.
Если сопротивление источника питания обозначить Zп, то для наилучшего симметрирования нужно выполнить условие:
Zк = Zп.
При питании СКР от сети переменного тока, сопротивление которой считается равной нулю, квадратурная обмотка С3С4 закорачивается.
Вторичное симметрирование выполняется с помощью роторной косинусной обмотки Р3Р4, к которой подключается нагрузка Zнк. Магнитный поток в этой обмотке ослабляет поток реакции, поскольку поперечные составляющие их МДС Fс поп и Fк поп направлены встречно (рис. 3.18). Наилучшая компенсация получается при условии, что:
 Zк
+ Zнк
= Zс
+ Zнс,
Zк
+ Zнк
= Zс
+ Zнс,
где Zс, Zк - сопротивления обмоток Р1Р2 и Р3Р4.
Полное симметрирование достигается при равенстве комплексных сопротивлений в синусной и косинусной цепях ротора (рис. 3.19). Это условие, в свою очередь, требует постоянства сопротивления нагрузки. Наибольшая линейность функции преобразования СКР достигается при комбинированном первично-вторичном симметрировании. Запишем в комплексных переменных:
![]()
![]() и
и
![]()
Здесь jс и jк - фазы отставания токов Iс и Iк от ЭДС в цепях роторных обмоток.
Zс = Zр + Zнс
Результирующие МДС по осям статора равны:
![]()
![]()
При малом Rв получим Eв » Uв » const, Zc » Zк и, следовательно, МДС по поперечной оси Fпоп = 0.
 В ряде случаев
целесообразно получить линейную
зависимость выходного напряжения от
угла поворота ротора. Для этого могут
использоваться обычные Р включенные
по линейной схеме или специализированные
ЛР. Схема включения Р по линейной схеме
моделирует зависимость вида (рис. 3.20):
В ряде случаев
целесообразно получить линейную
зависимость выходного напряжения от
угла поворота ротора. Для этого могут
использоваться обычные Р включенные
по линейной схеме или специализированные
ЛР. Схема включения Р по линейной схеме
моделирует зависимость вида (рис. 3.20):
Eс = k Eв sin q/(1 + y cos q)
где q - угол поворота, y - независящий от q комплексный множитель.
(При - 550 < q < + 550 и коэффициенте трансформации k = 0,52 ... 0,56 относительная погрешность линейности eнл составляет ~ 1%).
В простых режимах функция преобразования апроксимируется приближенным выражением:
 Eс
»
k'
Eв
q
Eс
»
k'
Eв
q
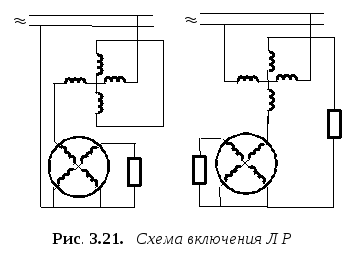
Также как и для синусно-косинусных схем, в ЛР применяют первичное и вторичное симметрирование (рис. 3.21).
Точность Р оценивают по погрешности отображения синуса (для СКР) и погрешность линейности (для ЛР), а также по величине остаточной ЭДС. Погрешность от «обмоточных гармоник» компенсируется выбором количества зубцов, их формы и скоса.
Р выпускают 6 классов точности: 0,01; 0,02; 0,05; 0,1; 0,2; 0,3. В таблице 3.6 приведены сведения по трем классам точности Р).
Таблица 3.6. Классы точности Р
|
Назначение |
Параметр |
Значение параметра для класса точности | ||
|
Величина |
0,01 |
0,05 |
0,3 | |
|
СКР |
Погрешность отображения синуса, % |
± 0,01 |
± 0,05 |
± 0,3 |
|
СКР |
Остаточная ЭДС, %, не более |
0,006 |
0,025 |
0,15 |
|
ЛР |
Погрешность линейности, % |
- |
± 0,05 |
± 0,3 |
|
ЛР |
Остаточная ЭДС, %, не более |
- |
0,025 |
0,15 |
Для использовании Р в качестве высокоточных ДПП, их обычно включают в измерительную цепь по схеме фазовращателя (Ф). В этой схеме информация об угловом положении вала преобразуется в сдвиг фазы выходного напряжения Отметим, что Ф представляет собой самостоятельный вид ЭДП, но традиционно для указанной цели также используются Р.
По конструкции Ф представляет собой электрическую машину неявнополюсного типа. Разработаны двухфазные Ф с вращающимся магнитным полем и однофазные с пульсирующим полем. Для повышения точности используют двойные и мостовые фазосдвигающие RC-фильтры, что уменьшает погрешность в 2 ... 3 раза. Точностные характеристики определяются величиной фазовой погрешности. В зависимости от нее Ф имеют 15 классов точности от 0,1’ до 600’. Номинальные коэффициенты трансформации k соответствуют ряду: 0,2; 0,4; 0,6; 0,8; 1,0.
Для получения функции преобразования Р в виде jU = f(q), где jU - фаза Uвых используются два подхода.
Первый - это создание потока возбуждения в виде вращающегося кругового магнитного поля. Второй подход предполагает суммирование выходных напряжений Р с помощью фазосдвигающих цепочек.
Для получения вращающегося магнитного поля статорные обмотки Р запитываются двумя синусоидальными напряжениями одинаковой амплитуды Uв max и сдвигом по фазе p/2 радиан (рис. 3.22). Сдвиг формируется фазовым расщепителем:
U1 = Uв max sin wt
U2 = Uв max sin (wt + p/2) = Uв max cos wt
Напряжение на роторе будет равно:
Uвых = Uc = k (U1 cos q + U2 sin q)
Подставляя значения U1 и U2, получим:
Uвых = k Uв max sin (wt + q)
 Таким
образом, при изменении q
фаза
Uвых
вращается относительно одного из
напряжений (U1)
синхронно с поворотом ротора на угол
q.
Таким
образом, при изменении q
фаза
Uвых
вращается относительно одного из
напряжений (U1)
синхронно с поворотом ротора на угол
q.
Полученное выражение функции преобразования справедливо, если амплитуды напряжений питания равны, и сдвиг фаз между ними равен p/2. Так, для получения фазовой погрешности ~ 0,1 % фазовый сдвиг не должен отличаться от p/2 более чем на (3 ... 5)‘, а разность амплитуд не должна превышать 0,3 … 0,5 %.
Принцип действия схемы с фазосдвигающим устройством (рис. 3.23) основан на получении сигнала несущей частоты, фаза которого сдвинута по отношению к опорному сигналу на угол, совпадающий с угловым отклонением вращающегося вала.
Учитывая, что
U1 = k1 Uв sin (wt + a1) sin q,
U2 = k2 Uв sin (wt +a2) cos q.
Тогда, при равенстве k1 и k2, а также wRC = 1, получим:
 Ua
= kUв
[sin wt
cos q
+ sin (wt
+p/2)
cos q]
Ua
= kUв
[sin wt
cos q
+ sin (wt
+p/2)
cos q]
или Ua = kUв sin (wt +q).
Параметры фазосдвигающей цепочки выбираются из условия: R = 1/wC >> r, где r - активное сопротивление роторной обмотки.
При Rн > 2R будем иметь окончательно
Uвых = Uа » k Uв sin (wt -y),
где y = q - a ; a - погрешность, связанная с постоянным сдвигом фаз, зависящим от асимметрии обмоток, температуры и т.п.).
 Следовательно,
фаза Uвых
пропорциональна фазе q
с точностью до параметра a.
В целом, такие схемы не позволяют достичь
высокой точности. Суммарная погрешность,
как правило, достигает 0,50
или 0,1%.
Следовательно,
фаза Uвых
пропорциональна фазе q
с точностью до параметра a.
В целом, такие схемы не позволяют достичь
высокой точности. Суммарная погрешность,
как правило, достигает 0,50
или 0,1%.
Частота сети (частота напряжения питания статора) fс = w/2p, и составляет 400 ... 4000 Гц.
С помощью триггера Шмитта опорное синусоидальное напряжение Uв и напряжение Uа преобразуются в прямоугольные сигналы и используются для формирования старт - и стоп-импульсов счетчика (рис. 3.24).
На основе Р строятся
разнообразные индукционные ДПП.
Рассмотрим в качестве примера датчик
угла, разработанный фирмой Muirhead,
Англия (рис. 3.25). Измерительная схема
датчика - двухшкальная, т.е. она
содержит каналы грубого (ГО) и точного
(ТО) отсчетов. Канал ГО служит для подсчета
количество полных оборотов ротора, ТО
- для определения величины угла в пределах
одного оборота. Генератор, делитель и
низкочастотный фильтр  формируют
синусоидальный сигнал возбуждения с
несущей частотой 1 кГц. Выходом Р является
роторная обмотка, на которой образуется
сигнал той же частоты, сдвинутый по фазе
относительно исходного на уголq.
Точностные характеристики датчика
зависят от частоты магнитного поля и
скорости вращения ротора. В стандартном
режиме частота вращения кругового
поля составляет 1 кГц. Поэтому, если Р
содержит одну пару полюсов, то за 1 мс
ротор повернется на 1 оборот, или 360о,
и за это время в счетчике накопится 360
импульсов. (Это значит, что выходной код
- девятиразрядный). Таким образом,
разрешающая способность датчика Dq
составит 10.
Следовательно, для поддержания
такой точности, необходимо, чтобы
изменение угла поворота ротора не
превышало 10
за 1 мс, что накладывает ограничение
на скорость вращения вала Nmax
- не более 15 об/мин. Погрешность линейности
схемы eнл
= 0,28%.
Частота среза fср
Р определяется той же формулой, что и
для РДП:
формируют
синусоидальный сигнал возбуждения с
несущей частотой 1 кГц. Выходом Р является
роторная обмотка, на которой образуется
сигнал той же частоты, сдвинутый по фазе
относительно исходного на уголq.
Точностные характеристики датчика
зависят от частоты магнитного поля и
скорости вращения ротора. В стандартном
режиме частота вращения кругового
поля составляет 1 кГц. Поэтому, если Р
содержит одну пару полюсов, то за 1 мс
ротор повернется на 1 оборот, или 360о,
и за это время в счетчике накопится 360
импульсов. (Это значит, что выходной код
- девятиразрядный). Таким образом,
разрешающая способность датчика Dq
составит 10.
Следовательно, для поддержания
такой точности, необходимо, чтобы
изменение угла поворота ротора не
превышало 10
за 1 мс, что накладывает ограничение
на скорость вращения вала Nmax
- не более 15 об/мин. Погрешность линейности
схемы eнл
= 0,28%.
Частота среза fср
Р определяется той же формулой, что и
для РДП:
fср = 3600 Nmax/2p a1
(При Nmax = 15 об/с, a1 = 2о, получим fср = 430 Гц).
Промышленно выпускаются и другие датчики, использующие ту же схему. Существенно, что них также справедливо ограничение на скорость вращения вала.
Схема Р, использующая преобразование «фаза-код» и основанная на принципе фазовращателя представлена на рис. 3.26.

Делитель частоты ДЧ формирует меандр частотой fn = fген/2n. Формирователь Ф1 преобразует его в синусоидальный сигнал той же частоты. Выходное напряжение Uвых с фазой пропорциональной углу поворота ротора q подается на блокинг-генератор (триггер Шмитта) Ф2, снова формирующий меандр в момент изменения знака напряжения Uвых. RS-триггер, элемент & (логическое «И») и линия задержки ЛЗ используются для синхронизации с генератором Г и ликвидации неоднозначности считывания (импульсы не попадают на фронты переключения триггеров T1, ... Tn). Разрешающая способность схемы зависит от числа пар полюсов p:
Dq = qmax/2n = 3600/p 2n
Так, при p = 512, n = 8, Dq » 10” и диапазон преобразования составит 360´ 60´60/10 = 1,3 105.
Р широко используются в качестве ДПП с системах управления оборудованием, роботов и манипуляторов.. Пример использования Р в системе управления копирующим манипулятором представлен на рис. 3.27, где система управления построена по принципу двухстороннего действия.
 Системы
двустороннего
действия
изначально разрабатывались для
манипулирования удаленными объектами
в экстремальных условиях, например, в
экологически вредном производстве.
Затем они нашли широкое применение и в
других задачах дистанционного
управления. (В частности, такие
устройства используются при управлении
концертными телекамерами). В системе
управления, представленной на рис.
3.27 обеспечивается двунаправленная
передача положений и усилий, что позволяет
оператору ощущать то, что он делает на
расстоянии. Такой подход существенно
повышает эффективность работы оператора
при значительно меньших физических и
умственных нагрузках. Копирующий
манипулятор представляет собой
сочетание двух пространственных
механизмов, образующих задающий и
исполнительный органы. По каждой степени
подвижности i
копирующего
манипулятора в системе двустороннего
действия имеются четыре функциональные
координаты: координаты вала на задающей
qзi
и исполнительной qиi
стороне и соответствующие координаты
моментов Мзi
и Миi.
В задачу системы ДСД входит обеспечение
согласованного движения органов и
поддержание соответствия между моментами
на стороне оператора и стороне нагрузки.
Включение Р в кинематическую цепь
копирующего манипулятора позволяет
согласовать движения задающего и
исполнительного органов. Расмотренная
схема получила название индикаторной
синхронной передачи. Обозначено:
Jоп,
Jн
- моменты инерции роторов Р и подвижных
частей на стороне оператора и нагрузки;
Mн
- момент нагрузки, вызванный переносимым
грузом.
Системы
двустороннего
действия
изначально разрабатывались для
манипулирования удаленными объектами
в экстремальных условиях, например, в
экологически вредном производстве.
Затем они нашли широкое применение и в
других задачах дистанционного
управления. (В частности, такие
устройства используются при управлении
концертными телекамерами). В системе
управления, представленной на рис.
3.27 обеспечивается двунаправленная
передача положений и усилий, что позволяет
оператору ощущать то, что он делает на
расстоянии. Такой подход существенно
повышает эффективность работы оператора
при значительно меньших физических и
умственных нагрузках. Копирующий
манипулятор представляет собой
сочетание двух пространственных
механизмов, образующих задающий и
исполнительный органы. По каждой степени
подвижности i
копирующего
манипулятора в системе двустороннего
действия имеются четыре функциональные
координаты: координаты вала на задающей
qзi
и исполнительной qиi
стороне и соответствующие координаты
моментов Мзi
и Миi.
В задачу системы ДСД входит обеспечение
согласованного движения органов и
поддержание соответствия между моментами
на стороне оператора и стороне нагрузки.
Включение Р в кинематическую цепь
копирующего манипулятора позволяет
согласовать движения задающего и
исполнительного органов. Расмотренная
схема получила название индикаторной
синхронной передачи. Обозначено:
Jоп,
Jн
- моменты инерции роторов Р и подвижных
частей на стороне оператора и нагрузки;
Mн
- момент нагрузки, вызванный переносимым
грузом.
Характеристики промышленных Р приведены в табл. 3.7
Таблица 3.7. Примеры промышленных Р
|
Модель |
Тип |
U, В |
f, кГц |
k |
Rвх, кОм |
e, % (‘) |
Æ, мм |
l, мм |
m, кг |
|
МВТ-2А |
СКР |
30 |
0,4 |
1 |
0,5 ... 2,0 |
0,02 |
35 |
72 |
0,35 |
|
СКТД-6465 |
СКР* |
36 |
0,4 .. 4 |
|
|
(± 2’) |
65 |
16 |
0,3 |
|
1,2ВТ-2ТВ |
ЛВТ |
6 |
0,4 |
0,5 |
0,2 |
0,04 |
12 |
47 |
0,02 |
|
TS-152 |
СКР |
26 |
0,4 |
1,1 |
0,5 ... 3,0 |
0,01 |
19 |
32 |
0,05 |
Примечания.
Модель TS-152 - разработана фирмой Tamagawa, Япония.
СКТД-6465 - многополюсный СКР, с р = 16.
В целом, погрешности Р с одной парой полюсов в режиме фазовращателя составляют 15 ... 25', многополюсного СКР ~ 5 … 10".
В завершение раздела подведем некоторые итоги. Достоинства Р: малые габариты, высокая надежность и помехозащищенность, высокий уровень выходного сигнала и умеренная стоимость привели к тому, что в течение почти семидесяти лет на основе этих датчиков строятся измерители углов разного назначения. В то же время Р не лишены недостатков. К ним относятся: необходимость симметрирования обмоток и использования измерительных схем, высокие требования к точности сборки пакетов магнитопроводов, наличие щеточного узла, зависимость точности от скорости вращения ротора, а также чувствительность к изменению внешних факторов - температуры среды, частоты и амплитуды напряжения возбуждения. Все это требует разработки других измерительных схем и поиска более точных решений.
В последнее время в связи с резко возросшими требованиями к точностным и динамическим характеристикам систем управления в различных мехатронных устройствах все чаще стали использоваться высокоточные и малоинерционные ДПП. Они имеют бесконтактную конструктивную схему и применяют электрическую редукцию, причем статор и ротор содержат зубцовые сопряжения определенных типов. Среди таких преобразователей наибольшую известность получили растровые ЭДП, редусины (РД) и индуктосины (И).