

3.1.1. Резистивные датчики положения
Резистивный датчик положения (РДП) представляет собой включенный по схеме делителя напряжений резистивный ЧЭ, информативный параметр которого - сопротивление регулируется положением подвижного контакта.
РДП относятся к преобразователям с абсолютным отсчетом - их функция преобразования монотонна и непрерывна. Датчики этого типа не требуют подсчета полных циклов измерения. Благодаря этому, кратковременная потеря информации не приводит к накоплению погрешности.
РДП классифицируются по следующим признакам:
По типу ЧЭ: проволочные (реостатные) и пленочные.
По траектории перемещения скользящего контакта: линейные, круговые (amax < 360o) и геликоидальные (amax > 360o).
По способу съема сигнала: контактные и бесконтактные.
Конструктивно РДП выполнен в виде потенциометра с подвижным движком. В большинстве случаев движок механически связан с потенциометром и представляет собой скользящий контакт. В некоторых моделях контакт заменен оптической или магнитной связью. На рис. 3.2 представлены схемы кругового и линейного РДП.
Сопротивление РДП в процессе работы изменяется по закону:

![]()
где R0
- сопротивление
РДП,
![]() - относительное перемещение
движка.
- относительное перемещение
движка.
Простейшими РДП являлись реостаты или системы Рустрата. Они состояли из константановой или никелиновой проволоки, навитой на корпус, по которой перемещался медный ползунок. Элемент сопротивления современных РДП также выполнен в виде проволоки, обладающей малым температурным коэффициентом сопротивления aR, малой термоЭДС и коррозионной стойкостью. Таким требованиям удовлетворяют материалы на основе константана (Cu-Ni-Mn), манганина и других медно-никелевых сплавов, нихрома. Витки проволоки изолированы друг от друга эмалью, открыта лишь та часть проволоки, по которой скользит контакт. Другим типом элемента сопротивления являются проводящие углеродные пленки (размер зерен ~ 0,01 мм).
РДП используются в измерительных системах как постоянного, так и переменного тока. При этом во втором случае, для проволочных РДП проявляется реактивная составляющая сопротивления обмотки, обусловленная индуктивностью и межвитковой емкостью.
Включение РДП в цепь осуществляется по схеме делителя напряжения (со средней точкой или без нее). В этой схеме РДП сопротивлением R0 подключается к источнику ЭДС Eи, с собственным сопротивлением Rи (рис. 3.3).
В общем случае, напряжение на выходе РДП Uвых, подаваемое на следующий каскад преобразователя (например, ИУ), с входным сопротивлением Rн равно:


В частном случае, при питании датчика от источника напряжения (Rи = 0), имеем Eи = Uи. При этом выходной сигнал РДП Uвых = U23 пропорционален сопротивлению R23 (образованному частью РДП R(x) = R2 и нагрузкой Rн = R3):
![]()
где
![]() .
Запишем:
.
Запишем:

Тогда, при отсутствии нагрузки на РДП R3 = ¥, R0=R1+R2, и поэтому Uвых /Uи » R2/R0, и, следовательно, зависимость U2 от R2 - линейна.
В линейной схеме делителя напряжения (с параметрами R0, Uи, R3) относительное перемещение c подвижного контакта резистора R0 меняется от 0 до 1. Функция преобразования РДП в относительных единицах Uвых= U23 = f(c) определяется из выражения:

Зависимость напряжения Uвых от R2 при наличии нагрузки нелинейна. Обозначим R2 = cR0, R1 = (1-c) R0. Тогда:


Вводя понятие коэффициента нагрузки kн = R3/R0 получим (рис. 3.4):
![]()
Следовательно,
функция преобразования нагруженного
РДП примет окончательный вид:
![]()
Заметим, что функции преобразования существенно зависит от коэффициента нагрузки и меняется в процессе перемещения движка РДП.
Характеристики РДП разделяют на две группы: эксплуатационные и метрологические.
К первым относятся: номинальное сопротивление R0 (обычно 0,1 ... 100 кОм ), допуск на номинал DR0 (± 1%), максимальная частота входного воздействия fmax (до 1 кГц ) и срок службы (измеряется в циклах полного преобразования: 106 циклов для реостатного РДП, 108 - для пластикового).
Среди метрологических характеристик выделяют: погрешность нелинейности eнл, разрешающая способность (погрешность нечувствительности eнч), погрешность люфта eл и погрешность вследствие шума сигнала. В соответствии со значением полной погрешности РДП отечественные модели, используемые в робототехнике, принято разделять на три класса точности (табл. 3.2).
Таблица 3.2. Классы точности отечественных РДП
|
Класс точности |
I |
П |
Ш |
|
Погрешность, % |
+ 0,25 |
+ 0,5 |
+ 1,0 |
Рассмотрим основные характеристики РДП, а также их влияние на свойства системы управления более подробно. Так, например, точность системы управления, практически не зависит от допуска DR0 на номинальное значение сопротивления РДП. В типовых режимах включения РДП измеряет лишь приращение сопротивления, следовательно, точность определяется, главным образом, линейностью функции преобразования.
Одним из важнейших параметров РДП является максимальная скорость перемещения движка, определяющая верхний частотный предел входных воздействий - частоту среза РДП. Рассмотрим линейный РДП, и, для простоты расчета допустим, что, движок совершает в окрестности положения равновесия l0 синусоидальное движение с амплитудой 1l = l0 + l1 sin wt. (w= 2pf). Следовательно, для максимальной скорости будет справедливо выражение:
![]() ,
,
Очевидно, что данное значение должно быть меньше заданного максимума Vmax, и тогда:
f < Vmax/2p l1.
(Например, для типичных значений Vmax = 2 м/с, l1= 0,3 мм, получим f < 1,1 кГц). Аналогично, для круговых РДП получим:
f < 3600 Nmax/2p a1
где a1 - амплитуда перемещений в градусах. (При Nmax = 40 об/с, a1 = 2о, f < 1,1 кГц).
Частотные электрические свойства определяются реактивными составляющими сопротивления. Постоянная времени t не зависит от частоты f и при w <<w0 равна:
![]()
где
w
- круговая
частота переменного тока,
L,
C
- соответственно межвитковая индуктивность
и емкость,
![]() - собственная круговая частота РДП.
- собственная круговая частота РДП.
Проволочные низкоомные (до 10 кОм) РДП имеют постоянную времени t ~ 10-6 ... 10-7 c, высокоомные ~10-4 ... 10-5 c и не используются при частотах сети выше 10 ... 50 кГц. На таких частотах применяются пленочные датчики.
 Погрешность
нелинейности
(мультипликативная составляющая
полной погрешности) обусловлена
отклонением отношения Uвых/Uи
нагруженного датчика от ненагруженного.
Величина относительной погрешности
eнл
равна:
Погрешность
нелинейности
(мультипликативная составляющая
полной погрешности) обусловлена
отклонением отношения Uвых/Uи
нагруженного датчика от ненагруженного.
Величина относительной погрешности
eнл
равна:
![]()
Значение eнл, а, следовательно, чувствительность РДП зависит от величины относительного перемещения движка и сопротивления нагрузки. Наибольшее отклонение реальной кривой от идеальной имеет место при c= 2/3:
![]() .
.
(Например, для Rн > 100 R0, eнл max не превышает 0,15%, а при Rн = 2 R0 она составляет 17%).
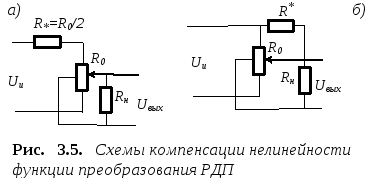
Линеаризация
достигается двумя способами: включением
резистора R*
последовательно РДП (рис. 3.5а), или
R*
= R3
параллельно
верхнему плечу РДП (рис. 3.5б). В первом
случае, обозначив
![]() ,
получим:
,
получим:
![]() .
Оптимальная линеаризация достигается
при k =
1,5.
.
Оптимальная линеаризация достигается
при k =
1,5.
Разрешающая способность РДП характеризуется зоной нечувствительности D, равной: D = xmax/n, где xmax - диапазон измерения (линейный или угловой) РДП, n - число витков. Для проволочных РДП разрешение D, определяется максимальным перемещением, необходимым для перехода движка из своего положения в ближайшее соседнее. Оно зависит от формы и толщины проволоки, размеров движка и меняется по мере их износа. (Для увеличения разрешающей способности РДП используют проволоку малого диаметра, правда это приводит к более быстрому износу). В абсолютном измерении для лучших линейных РДП D ~ 10 мкм.
 Величина
погрешности нечувствительности
eнч
проволочного
РДП определяется выражением:
Величина
погрешности нечувствительности
eнч
проволочного
РДП определяется выражением:
eнч = DR/R0
где DR - минимальная величина изменения сопротивления РДП.
Значение eнч для РДП с проволочными ЧЭ составляет ~ 0,1 ... 3%, достигая для прецизионных моделей ~ 0,002%. Зона нечувствительности зависит от количества витков проволоки, замыкаемых движком, которое, даже в лучших моделях изменяется по длине датчика (рис. 3.6). Поэтому, функция преобразования РДП будет «ступенчатой», причем размеры ступенек неодинаковы. Это приводит к расширению полосы погрешностей за счет дополнительной нелинейности. Учитывая это обстоятельство, получим: DR = R0/2n, и следовательно
 (eнч ) min
= 1/2n
(eнч ) min
= 1/2n
В целом аддитивная погрешность РДП оценивается значением 1/n … 2/n.
Дискретность функции преобразования проволочных РДП составляет для однооборотного типа ПТП-1 -150 мВ, для геликоидального двадцатиоборотного типа ППМЛ -10 мВ.
Наилучшее разрешение обеспечивают полосковые РДП, имеющие мелкозернистую структуру. (Для них погрешность нечувствительности составляет ~ 0,1 мкм).
Для увеличения разрешающей способности РДП используют рычажный привод, увеличивающий масштаб перемещения движка (рис. 3.7).
Люфт РДП обусловлен зазором между движком и осью датчика. В первом приближении справедливо:
 DR
=
R0
d/gr,
DR
=
R0
d/gr,
где d - радиальный зазор между осью и втулкой, r - длина движка, g - угол дуги, занимаемый обмоткой. Тогда, погрешность люфта eл будет равна:
eл = DR/R0 = d/gr
Для уменьшения величины eл в конструкциях РДП используются осевые подшипники (например, в отечественных моделях СП5-21, СП4-8).
Шумы РДП обусловлены как свойствами ЧЭ датчика, так и наводками в измерительной цепи датчика. В первом случае - это аддитивная помеха, обусловленная изменением сопротивления РДП при перемещении движка. Она является следствием разнородности структуры ЧЭ в зоне контакта, вибраций и т.д. Запишем: Uвых(x) = Uсигн(x) + u(x), причем u(х) = Rш(x) i. Здесь Uсигн(x) - напряжение «чистого» сигнала, u(x) - составляющая шума, i - ток через подвижный контакт (i обычно не более 1 мА), Rш(x) - шумовое сопротивление РДП.
Допустимый уровень
шума РДП указывается в паспорте на
датчик. Например, для однооборотного
РДП типа СП4-8 u(х)
составляет
2 мВ. Величина Rш
полосковых РДП существенно больше, чем
проволочных и достигает 2%. Наличие шумов
РДП, приводит к большим погрешностям
при дифференцировании сигналов (например,
при определении скоростей). Для их
уменьшения, разрабатываются бесконтактные
пленочные схемы с полосой из фотопроводящего
слоя. Такие датчики (рис. 3.8), выпускаются
в настоящее время многими фирмами
(например, Segor, Франция и др.) Резистивный
слой фотопотенциометра
представляет собой пластинку, покрытую
тонким слоем сернистого кадмия.
Принцип действия РДП основан на внутреннем
фотоэффекте. При освещении поверхности
пластины образуется проводящая перемычка,
сопротивление которой на несколько
порядков ниже сопротивления  затененных
участков фоточувствительного
слоя. Потенциал резистивного слоя
снимается в точкех,
и, следовательно, выходное напряжение
является функцией координаты светового
пятна. Если сопротивление нагрузки Rн
>>
Rосв,
то данный прибор работает как обычный
потенциометр. (Rосв
- сопротивление освещенного участка).
Чувствительность (крутизна)
фотопотенциометра S
составляет
~
10 … 50 мВ/мм, при световой чувствительности
Sс
= Rосв/Rтем
достигающей
106.
Недостатком РДП этого типа является
низкое быстродействие t
~
1 … 5 мс. По такой схеме строят
однокоординатные и двухкоординатные
амплитудные следящие устройства (рис.
3.9). Технические характеристики
промышленных РДП приведены в табл. 3.3.
Обозначено: N
- количество полных оборотов РДП (циклов
преобразования).
затененных
участков фоточувствительного
слоя. Потенциал резистивного слоя
снимается в точкех,
и, следовательно, выходное напряжение
является функцией координаты светового
пятна. Если сопротивление нагрузки Rн
>>
Rосв,
то данный прибор работает как обычный
потенциометр. (Rосв
- сопротивление освещенного участка).
Чувствительность (крутизна)
фотопотенциометра S
составляет
~
10 … 50 мВ/мм, при световой чувствительности
Sс
= Rосв/Rтем
достигающей
106.
Недостатком РДП этого типа является
низкое быстродействие t
~
1 … 5 мс. По такой схеме строят
однокоординатные и двухкоординатные
амплитудные следящие устройства (рис.
3.9). Технические характеристики
промышленных РДП приведены в табл. 3.3.
Обозначено: N
- количество полных оборотов РДП (циклов
преобразования).
Таблица 3.3. Примеры промышленных РДП
|
Модель |
Тип |
Диапазон, мм (град) |
Быстродействие, м/с, (рад/с) |
e, % |
N, цикл |
m, кг |
Габариты, мм |
|
Вт-721 |
линейный |
0 ... 16000 |
0,3 |
1 |
5 103 |
0,9 |
43´76´120 |
|
Вт-712 |
круговой |
(0 ... 688) |
(1,3) |
1 |
6,5 103 |
0,2 |
Æ53´56 |
|
Вт-714 |
комбинированный |
0 ... 16000 (±70) |
|
1,5 (2) |
3 104 (5 104) |
1,0 |
56´120´133 |
|
LP-250F |
линейный |
0 ... 250 |
1,2 |
0,1 |
106 |
0,3 |
Æ34´272 |
Примечание. Модель LP-250F разработана фирмой Midory Sokky, Япония.
К достоинствам РДП следует отнести простоту построения измерительных схем, высокий уровень выходного сигнала, малогабаритность и «встраиваемость» в оборудование. Следует отметить также, что они обладают радиационной стойкостью; и низкой стоимостью.
Недостатками РДП являются нелинейность характеристики при нагрузке, наличие зоны нечувствительности и малая износостойкость (не более 107 поворотов оси) для лучших моделей контактных РДП. Для них характерна также сравнительно малая частота вращения (до 100 ... 200 об/мин); чувствительност к вибрациям и загрязнению.