

5.2. Электромагнитные локационные системы
Принцип работы электромагнитных локационных систем (ЭЛС) основан на взаимодействии электромагнитного поля преобразователя с металлическими объектами. ЭЛС чаще всего выполняют функции информационных средств параметрического контроля и дефектокопов, реже - измерителей расстояний, вибраций и др. В качестве ЧЭ ЭЛС используются дроссели и трансформаторы различной формы.
В зависимости от типа преобразователя и частоты магнитного поля ЭЛС разделяются на 3 группы:
м
 агнитные
ЛС (индуктивные и индукционные) - в них
применяется постоянное или низкочастотное
магнитное поле;
агнитные
ЛС (индуктивные и индукционные) - в них
применяется постоянное или низкочастотное
магнитное поле;вихретоковые - возбуждение осуществляется переменным магнитным полем частотой 2 102 ... 5 106 Гц;
радиоволновые - основаны на использовании электромагнитных излучений СВЧ диапазона (длина волны 0,1 ... 10 мм).
5.2.1. Магнитные локационные системы
Магнитные ЛС широко
используются в дефектоскопии
для выявления нарушений сплошности
предметов из ферромагнитных материалов,
обнаружения мелких трещин (размером 3
… 10 мкм) на их поверхности, определения
толщины немагнитных покрытий на магнитной
основе и толщины стенок изделий из
магнитных и немагнитных материалов.
Принцип магнитной дефектоскопии
иллюстрирует рис.5.16. Если ферромагнитный
объект помещен в однородное магнитное
поле, то при отсутствии дефектов в
материале объекта м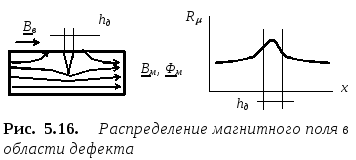 агнитный
поток Ф
практически
не выходит за пределы объекта, т.к.
магнитная индукция в воздухе Bв
в
раз меньше,
чем в металле
Bм:
Bм
=
Bв.
Следовательно, магнитное сопротивление
R,
например, трещины шириной hд
будет намного выше, чем участка материала
ферромагнетика. Использование магнитных
ЛС в задачах дефектоскопии требует
создания достаточно высоких уровней
магнитной индукции в материале объекта.
Поэтому, определяющее значение приобретают
собственно магнитные характеристики
объекта, для оценки которых, наряду с
рассмотренным ранее параметром -
величиной остаточной индукции Bост,
используются также намагниченность
и магнитная
восприимчивость материала .
Намагниченность
представляет собой векторную
величину, характеризующую состояние
вещества при воздействии на него
магнитного поля напряженностью H:
агнитный
поток Ф
практически
не выходит за пределы объекта, т.к.
магнитная индукция в воздухе Bв
в
раз меньше,
чем в металле
Bм:
Bм
=
Bв.
Следовательно, магнитное сопротивление
R,
например, трещины шириной hд
будет намного выше, чем участка материала
ферромагнетика. Использование магнитных
ЛС в задачах дефектоскопии требует
создания достаточно высоких уровней
магнитной индукции в материале объекта.
Поэтому, определяющее значение приобретают
собственно магнитные характеристики
объекта, для оценки которых, наряду с
рассмотренным ранее параметром -
величиной остаточной индукции Bост,
используются также намагниченность
и магнитная
восприимчивость материала .
Намагниченность
представляет собой векторную
величину, характеризующую состояние
вещества при воздействии на него
магнитного поля напряженностью H:
![]()
где V - объем вещества, m - элементарный магнитный момент. Индукция в намагниченном материале определяется формулой: Bм = 0 (H + ), где 0 = 4 10-7 Гн/м. Напомним, что остаточной индукцией Bост называется та ее часть, которая остается в намагниченном до насыщения материале после снятия с него магнитного поля.
Второй важной характеристикой вещества (магнетика), учитывающей его способность намагничиваться в магнитном поле является магнитная восприимчивость , равная: = /H. Для всех металлов зависит от : = 1+ , причем для диамагнетиков < 0, а для парамагнетиков > 0. Поскольку, в обоих случаях не зависит от напряженности магнитного поля H и мало отличается от единицы, значения магнитной восприимчивости для этих материалов весьма малы. 10-6 … 10-4 - для диамагнетиков, и 10-7 … 10-6 - для парамагнетиков.
Магнитные дефектоскопы позволяют обнаруживать подповерхностные трещины и раковины на глубине до 20 мм.
Д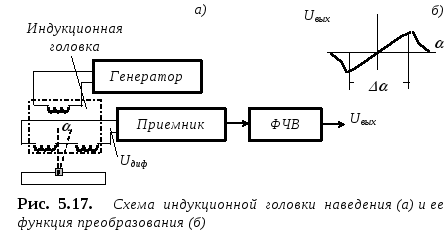 ругой
областью применения магнитных ЛС
являетсяизмерение
зазоров
в магнитных цепях. В системах этого типа
используются как индуктивные, так и
индукционные датчики (рис. 5.15). В первых
- вариации магнитного сопротивления
зазора R
вызывает изменение индуктивности
катушки L,
во втором под действием того же фактора
изменяется ЭДС индукции Е.
В простейших магнитных ЛС возбуждение
катушки внешним источником питания не
производится; при этом выходной сигнал
Uс
возникает только при движении объекта
относительно датчика. На этом принципе
построены магнитные головки разных
типов, использующиеся в системах
магнитной записи сигналов (рис. 5.15а).
Для повышения эффективности магнитных
головок их сердечник выполняется из
материала с большой магнитной
проницаемостью (феррита, пермаллоя
и др.). В системах измерения зазоров или
малых расстояний (рис. 5.15б) головка
содержит две катушки - первичная
запитывается от внешнего источника
питания Uп,
а вторая является сигнальной.
ругой
областью применения магнитных ЛС
являетсяизмерение
зазоров
в магнитных цепях. В системах этого типа
используются как индуктивные, так и
индукционные датчики (рис. 5.15). В первых
- вариации магнитного сопротивления
зазора R
вызывает изменение индуктивности
катушки L,
во втором под действием того же фактора
изменяется ЭДС индукции Е.
В простейших магнитных ЛС возбуждение
катушки внешним источником питания не
производится; при этом выходной сигнал
Uс
возникает только при движении объекта
относительно датчика. На этом принципе
построены магнитные головки разных
типов, использующиеся в системах
магнитной записи сигналов (рис. 5.15а).
Для повышения эффективности магнитных
головок их сердечник выполняется из
материала с большой магнитной
проницаемостью (феррита, пермаллоя
и др.). В системах измерения зазоров или
малых расстояний (рис. 5.15б) головка
содержит две катушки - первичная
запитывается от внешнего источника
питания Uп,
а вторая является сигнальной.
Пример использования индукционной головки наведения для управления подвижным мобильным средством приведен на рис. 5.17а. Головка была включена в состав навигационной системы транспортной тележки, перемещающейся внутри цеха вдоль уложенных в подповерхностном слое металлических шин. Катушка возбуждения создает высокочастотное электромагнитное поле, которое на поверхности металлической шины наводит соответствующее магнитное поле, под действием которого во вторичных (сигнальных) катушках генерируются переменные напряжения. Обмотки катушек соединены дифференциально, в результате чего их суммарный сигнал соответствует разности напряжений в каждой катушке. Угловое рассогласование вызывает на выходе фазочувствительного выпрямителя ФЧВ сигнал Uвых, амплитуда которого пропорциональна напряжению Uдиф, а знак соответствует фазе (рис. 5.17б).
 Магнитные
ЛС на базе индуктивных датчиков расстояния
широко используются в робототехнике.
На рис. 5.18 представлена функция
преобразования и схема включения
индуктивного датчика в контур управления
сварочным роботом. Выходные сигналы
поступают в регулятор привода, который
перемещает горелку по соответствующей
оси до тех пор, пока не будет достигнуто
требуемое расстояние Lраб
между
электродом и поверхностью заготовки.
Это расстояние, определяемое
эмпирически, составляет в среднем
6, 4 и 3 мм соответственно для черных
металлов, алюминия и меди. Точность
отслеживания траектории достигает
0,4 мм.
Магнитные
ЛС на базе индуктивных датчиков расстояния
широко используются в робототехнике.
На рис. 5.18 представлена функция
преобразования и схема включения
индуктивного датчика в контур управления
сварочным роботом. Выходные сигналы
поступают в регулятор привода, который
перемещает горелку по соответствующей
оси до тех пор, пока не будет достигнуто
требуемое расстояние Lраб
между
электродом и поверхностью заготовки.
Это расстояние, определяемое
эмпирически, составляет в среднем
6, 4 и 3 мм соответственно для черных
металлов, алюминия и меди. Точность
отслеживания траектории достигает
0,4 мм.
В качестве первичных преобразователей магнитных ЛС также служат феррозонды (полемеры), преобразователи Холла и др.
Магнитные ЛС являются основными средствами неразрушающего контроля в литьевом и прокатном производстве. К их достоинствам относятся: простота конструкций, большая глубина зоны контроля, высокая надежность (на показания датчика практически не влияют климатические факторы, загрязнения поверхности). Недостатками магнитных ЛС являются низкая разрешающая способность и нелинейность функции преобразования.