

7.3. Датчики систем силомоментного очувствления роботов
В настоящее время более 80 крупных фирм выпускают ССО и отдельные СМД роботов.
Основным элементом ССО робота является СМД, осуществляющий разложение многокомпонентного вектора F по компонентам вектора электрических сигналов U. Дальнейшее преобразование информации, в том числе и формирование управляющих воздействий в систему управления (СУ) робота реализуется либо непосредственно в датчике (концепция «интеллектуального СМД»), либо в управляющем процессоре СУ робота.
С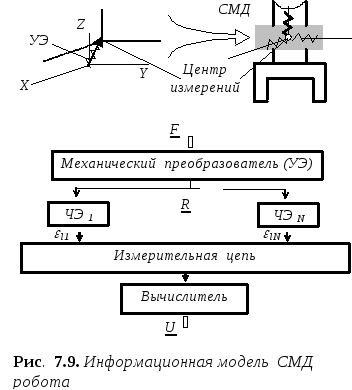 труктурно
СМД представляет собоймногоканальную
измерительную систему в виде совокупности
упругих и чувствительных
элементов, специальным образом
ориентированных в пространстве (рис.
7.9). Процедура преобразования информации
в СМД заключается в получении вектора
электрических сигналов U,
компоненты которого пропорциональны
компонентам главного вектора сил и
моментов F.
Следовательно, функцию преобразования
СМД можно описать выражением: U
= S
F,
где S
- матрица чувствительности. Данное
преобразование реализуется в три этапа:
труктурно
СМД представляет собоймногоканальную
измерительную систему в виде совокупности
упругих и чувствительных
элементов, специальным образом
ориентированных в пространстве (рис.
7.9). Процедура преобразования информации
в СМД заключается в получении вектора
электрических сигналов U,
компоненты которого пропорциональны
компонентам главного вектора сил и
моментов F.
Следовательно, функцию преобразования
СМД можно описать выражением: U
= S
F,
где S
- матрица чувствительности. Данное
преобразование реализуется в три этапа:
шестикомпонентный вектор F раскладывается в базисе УЭ и регистрируется ЧЭ датчика: el = f(F, R), R - вектор перемещения центра измерений;
сигналы с ЧЭ суммируются измерительной цепью СМД и нормируются с помощью измерительного усилителя: U = f(el) ;
вычисляется действующее значение: F = f(U).
Под центром измерений обычно понимается точка приложения вектора F.
Включение такой системы в контур управления робота, приводит к существенному влиянию ее параметров на динамические характеристики и точность приводов. Особенно большое влияние оказывает конструкция СМД; именно через нее осуществляется замыкание кинематической цепи робота. Поэтому к датчикам ССО предъявляются следующие требования:
высокая жесткость (собственные резонансные частоты с характерной массой, например, схватом, не менее 50 Гц);
уровень перекрестных связей между каналами измерения, не более 5%;
высокая линейность и малый гистерезис ( л и г, не более 1%);
быстродействие (время преобразования) Tп, не более 0,01 с;
малые массогабаритные и инерционные характеристики УЭ.
В настоящее время, промышленно выпускаются десятки моделей СМД. При этом все известные решения выполняются в рамках одной из двух базовых концепций построения ССО:
используются простые конструктивные схемы датчиков, требующие сложных вычислительных операций для определения компонент,
разрабатываются пространственно сложные конструкции, не требующие дополнительных вычислений.
Включение СМД в кинематическую цепь манипулятора предполагает, что его собственная жесткость должна быть ниже жесткости исполнительного механизма. Конструктивно любой СМД представляет собой пространственную пружину, допускающую упругое перемещение центра измерений относительно трех осей координат. Это перемещение в пределах зоны упругости описывается известной зависимостью: F = C R, где С - матрица жесткости СМД. Коэффициенты матрицы жесткости характеризуют величину номинальных деформаций УЭ датчика. Вид матрицы жесткости определяет перекрестные связи в механическом преобразователе и указывает, в каких направлениях будет перемещаться центр измерений СМД под действием некоторой компоненты вектора F. Следовательно, матрица жесткости является важнейшей характеристикой СМД, описывающей как параметрические, так и структурные свойства конструкции. Первые характеризуют собственно жесткость каналов измерения, вторые - перекрестные связи между ними. Эти признаки обычно применяют при классификации СМД.
По значениям коэффициентов жесткости конструкции различают: СМД высокой жесткости (используются измерители деформаций) и низкой жесткости (используются с измерителями перемещений).
По типу матрицы жесткости: соответственно СМД с матрицей жесткости общего вида и СМД с «разреженной» матрицей жесткости.
В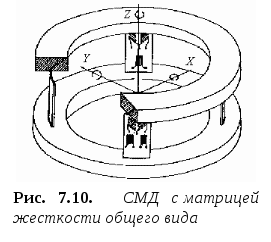 зависимости от типа матрицы жесткостиC
преобразование вектора F
в вектор U
производится либо в вычислительном
модуле СМД (для датчиков простой формы),
либо непосредственно в его конструкции
(для датчиков с преимущественно
механическим разделением компонент).
зависимости от типа матрицы жесткостиC
преобразование вектора F
в вектор U
производится либо в вычислительном
модуле СМД (для датчиков простой формы),
либо непосредственно в его конструкции
(для датчиков с преимущественно
механическим разделением компонент).
Наиболее распространенными измерителями деформаций являются ТР, а также пьезо- и магнитострикционные преобразователи, измерителями перемещений - оптронные пары или электромагнитные (реже - электростатические) ЧЭ.
Проведем краткий обзор основных конструктивных схем СМД.
СМД высокой жесткости строятся на базе УЭ типа балок равного сечения с наклеенными на них ТР. В системах управления сборочными манипуляторами широко используются запястные СМД, с матрицей жесткости общего вида. Базовые схемы таких датчиков были разработаны в середине 70-х годов ХХ века в Лаборатории Дрейпера (США) и Католическом Университете (Бельгия). Пример одной из них представлен на рис 7.10. Конструктивно датчик представляет собой два фланца, связанных между собой УЭ. При деформации фланцы упруго перемещаются друг относительно друга. На внутренней стороне трех (в других моделях - четырех) УЭ наклеены фольговые ТР, измеряющие деформации растяжения-сжатия, а на внешней стороне - сдвига. Поскольку, в каждом УЭ возникают деформации от всех шести компонент вектора F, функция преобразования датчика описывается матричным уравнением общего вида: U = S F, S - где матрица чувствительности. Каждая компонента вектора U является линейной комбинацией компонент вектора F. Для вычисления значений компонент вектора F необходимо провести обратное преобразование: F = S-1 U, где S-1 - матрица обратная к матрице S.
Коэффициенты матрицы чувствительности sij (i, j = 1 … 6) определяются при тарировке СМД. С этой целью к нему поочередно вдоль каждой координатной оси прикладываются силы и моменты заданной величины и определяются уровни выходных сигналов ui с каждого из ТР. В пределах упругости коэффициенты sij полагаются постоянными и их значения указываются в паспорте на датчик.
Е сли
матрицаS
не квадратная (прямоугольная), то
расчеты проводят на основании
псевдообратной матрицы S*-1,
равной: S*-1
=
(ST
S)-1
ST
.
сли
матрицаS
не квадратная (прямоугольная), то
расчеты проводят на основании
псевдообратной матрицы S*-1,
равной: S*-1
=
(ST
S)-1
ST
.
Датчики с матрицей жесткости общего вида при значительных габаритах измеряют достаточно высокие значения моментных компонент вектора нагрузки. Так, для датчика, представленного на рис. 7.11, с диаметром 120 мм, высотой 20 мм и размерами УЭ 61,5 мм диапазон измерения по силам составляет от 200 Н - для компонент Fx, Fy до 400 Н для Fz и моментам от 10 Нм для Mx, My до 20 Нм для Mz. Порог чувствительности по всем компонентам достигает 0,05%, максимальный уровень выходного сигнала 10 мВ.
Очевидны достоинством СМД с матрицей жесткости общего вида, является простота конструкции, что делает их весьма привлекательными для использования в робототехнике. Однако датчики этой группы обладают и существенными недостатками. Так, поскольку каждый из УЭ должен рассчитываться на действие всех компонент нагрузки, это приводит к низкому значению коэффициента использования диапазона линейных деформаций. Кроме того, таким датчикам свойственна разная чувствительность каналов измерения и низкое быстродействие (значительное время вычисления компонент).
Указанные обстоятельства привели к тому, что в современных ССО все чаще используются СМД с преимущественно механическим разделением компонент, очувствляющие захватное устройство, рабочую среду или запястье робота. Примерами таких датчиков являются конструктивные схемы, разработанные фирмой IBM (США) и Токийским университетом. Схема шестикомпонентного СМД, очувствляющего «пальцы» захватного устройства манипулятора строится из шести одинаковых взаимозаменяемых УЭ балочного типа. Каждый палец схвата (а всего конструкция СМД включает два пальца) представляет собой шесть модулей с ТР ЧЭ, плоскости которых ориентированы в трех взаимно перпендикулярных плоскостях (рис. 7.11). Центр измерений СМД совпадает с кончиком пальца (точка О). Любую силу, или момент, действующие на захватное устройство можно представить в виде проекций на оси подвижной системы координат OXYZ. Если сигналы с каждого ЧЭ обозначить Ui (i = 1… 6) и зная размеры УЭ, можно определить искомые проекции вектора сил и моментов F:
Fx = (U1 - U2)/(z1 - z2),
Fy = (U6 - U5)/(z6 - z5),
Fz = [U3 + Fy (z0 - z3) - Mx]/(y0 - y3),
Mx = [-U5(z0 - z6) + U6 (z0 - z5)]/(z6 - z5),
My = [U1 (z0 - z2) - U2 (z0 - z1)]/(z1 - z2),
Mz = U4 + Fx (y0 - y4).
С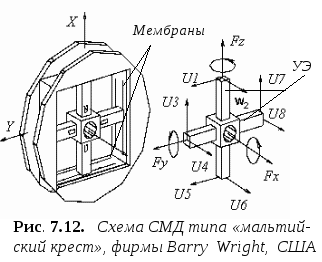 МД
подобного типа использовался в
роботизированном комплексе сборки
узлов пишущих машинок. (Диапазон измерения
сил составлял: 0 ... 10 Н, максимальный
выходной сигнал при использовании
полупроводниковых ТР - 1В).
МД
подобного типа использовался в
роботизированном комплексе сборки
узлов пишущих машинок. (Диапазон измерения
сил составлял: 0 ... 10 Н, максимальный
выходной сигнал при использовании
полупроводниковых ТР - 1В).
Схема «мальтийского
креста»
использует только изгибные УЭ (это
обеспечивает примерно равную
чувствительность каналов) и частичное
разделение компонент при сравнительно
простой конструкции механического
преобразователя (рис. 7.12). Датчик содержит
четыре УЭ (балки), связанные через
внутренний фланец (на рисунке не показан)
с запястьем робота, а через четыре
упругие мембраны с внешним фланцем.
Внешний фланец СМД соединен с захватным
устройством. Сигналы U
с восьми ТР, установленных попарно
на каждом УЭ связаны с главным вектором
сил и моментов F
выражением: U
= S
F,
где матрица чувствительности СМД S
имеет вид:
 .
.
Матрица жесткости C, связывающая компоненты вектора F и вектора перемещений центра измерений X (центра координат или центра симметрии) такого СМД диагональна: F = C X, C = diag cij; (i, j = 1, 2, .. 6). Запястные датчики типа «мальтийский крест» позволяют строить прецизионные ССО высокого быстродействия.
В о
всех рассмотренных примерах СМД в
качестве ЧЭ использовались измерители
деформаций. Если же к датчику предъявляются
требованиямалой
жесткости,
то ЧЭ целесообразно строить на базе
измерителей перемещений.
Наиболее известными ЧЭ этого типа
являются электромагнитные, реже емкостные
(электростатические) преобразователи.
Как правило, СМД с измерителями перемещений
не обладают высокими метрологическими
характеристиками, и, поэтому, измерение
в них выполняет лишь вспомогательную
(контрольную) функцию. Заметим, что схемы
на базе электромагнитных ЧЭ обладают
большой мощностью выходного сигнала и
не требуют использования усилительных
схем, однако их функция преобразования
нелинейна. Диапазон измерения сил
составляет
102
Н ... 107
Н. Что касается СМД на базе емкостных
преобразователей, то для них характерны
сравнительно малые размеры и широкий
диапазон измеряемых усилий, однако они
требуют применения высоких несущих
частот (для снижения утечек) и имеют
повышенную чувствительность
к загрязнению. В то же время, линейность
таких датчиков высока, и они стабильны
до очень высоких температур. Использование
высоких несущих частот обеспечивает
хорошую помехозащищенность к
магнитным полям. Диапазон измерения
сил лежит в пределах
10-3
Н ... 107
Н.
о
всех рассмотренных примерах СМД в
качестве ЧЭ использовались измерители
деформаций. Если же к датчику предъявляются
требованиямалой
жесткости,
то ЧЭ целесообразно строить на базе
измерителей перемещений.
Наиболее известными ЧЭ этого типа
являются электромагнитные, реже емкостные
(электростатические) преобразователи.
Как правило, СМД с измерителями перемещений
не обладают высокими метрологическими
характеристиками, и, поэтому, измерение
в них выполняет лишь вспомогательную
(контрольную) функцию. Заметим, что схемы
на базе электромагнитных ЧЭ обладают
большой мощностью выходного сигнала и
не требуют использования усилительных
схем, однако их функция преобразования
нелинейна. Диапазон измерения сил
составляет
102
Н ... 107
Н. Что касается СМД на базе емкостных
преобразователей, то для них характерны
сравнительно малые размеры и широкий
диапазон измеряемых усилий, однако они
требуют применения высоких несущих
частот (для снижения утечек) и имеют
повышенную чувствительность
к загрязнению. В то же время, линейность
таких датчиков высока, и они стабильны
до очень высоких температур. Использование
высоких несущих частот обеспечивает
хорошую помехозащищенность к
магнитным полям. Диапазон измерения
сил лежит в пределах
10-3
Н ... 107
Н.
На рис. 7.13а представлена схема СМД малой жесткости RCC-типа. ССО, использующие СМД с подобной конструктивной схемой, объединяют достоинства активного и пассивного принципов адаптации. УЭ датчика выполняются на базе эластомерных структур, обладающих преимущественно одноосным напряженным состоянием. Эластомер (рис. 7.13б) представляет собой набор из чередующихся резиновых и металлических дисков малой толщины склеенных между собой. Такая конструкция обладает достаточно высокой жесткостью на сжатие и легко деформируются на сдвиг, являясь, таким образом, УЭ сдвигового типа. Перемещения центра измерений СМД (его фокуса) производится четырьмя оптронными датчиками (светодиод и четыре фотодиода). При малых перемещениях фокуса четыре компоненты вектора F определяются из линеаризованных уравнений вида [ ]:
![]() ;
;
![]()
![]() ;
;
![]()
З десьU1
…U4
- выходные сигналы фотодиодов, L1
и L2
- базовые размеры оптронного блока. СМД
данного типа при размерах 12565
мм обладает невысокой жесткостью (
104
Н/м и 102
Нм/рад) и, в принципе, может работать как
датчик
перемещений.
Приведем основные характеристики
датчика - диапазон
измерения: перемещений
2мм, сил - 0 ... 30 Н, моментов - 0 ... 1,5 Нм,
основная погрешность
= 5%, уровень перекрестных связей ij
= 5%., разрешающая способность при измерении
перемещений
2,5 мкм.
десьU1
…U4
- выходные сигналы фотодиодов, L1
и L2
- базовые размеры оптронного блока. СМД
данного типа при размерах 12565
мм обладает невысокой жесткостью (
104
Н/м и 102
Нм/рад) и, в принципе, может работать как
датчик
перемещений.
Приведем основные характеристики
датчика - диапазон
измерения: перемещений
2мм, сил - 0 ... 30 Н, моментов - 0 ... 1,5 Нм,
основная погрешность
= 5%, уровень перекрестных связей ij
= 5%., разрешающая способность при измерении
перемещений
2,5 мкм.
Принцип очувствления рабочей среды реализуется 4-ым вариантом ССО, включающим «очувствленный» монтажный столик, оснащенный приводами «точного» позиционирования и шестикомпонентный СМД, установленный в основании столика. Схема разработана M. Касаи в Токийском университете, Япония (рис. 7.14). Нижняя часть датчика сборочной системы, выполненная в виде плоского креста, используется для определения компонент Мх, Му, Fz, а верхняя - компонент Fx, Fy, Mz. ТР на нижней крестовине (УЭ 5, 6, 7, 8) измеряют деформации изгиба, в то время как на верхней (УЭ 1, 2, 3, 4) - сдвига. Основные соотношения для определения компонент имеют вид:
Fx = U2 - U4,
Fy = U1 - U3,
Fz = U5 + U6 + U7 + U8,
Мх = U6 - U8,
Му = U5 - U7,
Mz = U1 + U2 + U3 + U4.
Чувствительность СМД составляет 0,1%, при диапазоне измерения сил 0 ... 20 Н, моментов 0 ... 0,1 Н м. «Адаптивный сборочный столик» использовался в задачах прецизионной сборки. Достоинством схемы является высокое быстродействие, т.к. управляющие сигналы поступают непосредственно на приводы исполнительного механизма. В то же время, собственно датчик не лишен недостатков: его каналы обладают разной чувствительностью (для каналов с изгибными деформациями она на порядок выше, чем со сдвиговыми). Кроме того, наличие инерционных составляющих вызывает динамические погрешности.