

7.2. Принципы силомоментного очувствления роботов
С истемой
силомоментного очувствления
(ССО) робота называется СИС, включенная
в его контур управления и
предназначенная для измерения компонент
главного вектора сил и моментов,
действующих на схват или инструмент
манипулятора и формирования логического
или непрерывного управляющего воздействия
на исполнительный механизм в проекциях
на связанную с ним систему координат.
Типовая структура ССО приведена на
рис. 7.3. В отличие от СТЗ вычислительные
средства ССО обычно локальны и реализуются
на базе контроллеров и однокристальных
ЭВМ.
истемой
силомоментного очувствления
(ССО) робота называется СИС, включенная
в его контур управления и
предназначенная для измерения компонент
главного вектора сил и моментов,
действующих на схват или инструмент
манипулятора и формирования логического
или непрерывного управляющего воздействия
на исполнительный механизм в проекциях
на связанную с ним систему координат.
Типовая структура ССО приведена на
рис. 7.3. В отличие от СТЗ вычислительные
средства ССО обычно локальны и реализуются
на базе контроллеров и однокристальных
ЭВМ.
Современные ССО классифицируются по трем основным признакам.
По принципу измерения компонент главного вектора нагрузки: системы прямого измерения (включают СМД, устанавливаемый в разрыве кинематической цепи), системы косвенного измерения (используют вариации моментов нагрузки в приводах).
По способу очувствления: «очувствленный манипулятор» и «очувствленная среда».
По объекту управления: управляется непосредственно манипулятор робота и управляется автономный модуль.
Учитывая данную классификацию, выделяют пять типовых вариантов построения ССО (табл.7.2).
Таблица 7.2. Схемы построения ССО роботов
|
Вариант (тип ССО) |
Принцип измерения |
Место установки СМД |
Управляемый механизм | |||
|
прямой |
косвенный |
на манипуляторе |
вне манипулятора |
манипулятор |
автономный модуль | |
|
1 |
+ |
|
+ |
|
+ |
|
|
2 |
+ |
|
+ |
|
|
+ |
|
3 |
+ |
|
|
+ |
+ |
|
|
4 |
+ |
|
|
+ |
|
+ |
|
5 |
|
+ |
|
|
+ |
|
Так, например, первый вариант построения ССО предполагает управление манипулятором с помощью установленного на нем СМД. Рассмотрим эти варианты подробнее.
Заметим, что определение реакции между предметом в захватном устройстве робота и некоторой поверхностью (при абразивной обработке), или двумя предметами (при сборке) возможно несколькими способами. Обычно выделяют три: «очувствление» рабочей среды (в этом случае объект устанавливается на оснащенную датчиками платформу), «очувствление» захватного устройства или запястья робота, а также использование информации об усилиях, действующих на приводы робота через следящую систему.
С пособ«очувствления»
рабочей среды
был разработан в Стенфордском
исследовательском институте (США) П.
Уотсоном и С. Дрейком (рис. 7.4). В соответствии
с ним измерение силовых факторов
проводилось на системе из трех подвижных
платформ, оснащенных датчиками. Внешние
силовые факторы F
и M
вызывают взаимное перемещение платформ,
измеряемое вдоль осей X,
Y,
Z
с помощью восьми тензодатчиков,
расположенных между платформами.
Обозначив буквами
и
сигналы с
тензодатчиков, а l
сторону платформы получим:
пособ«очувствления»
рабочей среды
был разработан в Стенфордском
исследовательском институте (США) П.
Уотсоном и С. Дрейком (рис. 7.4). В соответствии
с ним измерение силовых факторов
проводилось на системе из трех подвижных
платформ, оснащенных датчиками. Внешние
силовые факторы F
и M
вызывают взаимное перемещение платформ,
измеряемое вдоль осей X,
Y,
Z
с помощью восьми тензодатчиков,
расположенных между платформами.
Обозначив буквами
и
сигналы с
тензодатчиков, а l
сторону платформы получим:
Fx = 4 + 2, Fy = 3 + 1, Fz = 2 + 4 + 1 + 3,
Mx = [(4 + 1) - (3 + 2)] l/2, My = [(4 + 3) - (1 + 2)] l/2, Mz = (1 - 2 - 3 + 4) l/2.
Тогда, если на платформу действует некоторая сила, то координаты точки ее приложения P определяются выражениями:
Zp = 0, Xp = - My/Fz, Yp = Mx/Fz.
В частности, по показаниям датчиков i (i = 1 ... 4) можно вычислить положение центра тяжести объекта Rцт, установленного на платформе и его изменение во времени:
Fx = Fy = 0, Fz = 2 + 4 + 1 + 3, Mx = [(4 + 1) - (3 + 2)] l/2, My = [(4 + 3) - (1 + 2)] l/2, Mz = 0.
Если же в качестве объектов используются сборочные единицы, то проекции центра тяжести, например, втулки, однозначно определяются по формулам:
![]() и
и

Указанные зависимости использовались при формировании закона управления роботом при сборке цилиндрической пары.
При «очувствлении» рабочей среды возможно появление значительных динамических ошибок из-за инерционности платформ. Кроме того, такой подход усложняет организацию рабочего места. Поэтому, многие структуры СИС используют многокомпонентные СМД, расположенные на схвате, максимально близко к области, в которой возникают усилия. (Первые разработки в области роботизированной сборки с использованием СМД проводились К. Розеном, Р. Грумом и А. Бейтси в США, а также Т. Гото в Японии).
В рамках концепции «очувствленного запястья» существует несколько конструктивных схем СМД. Выбор той или иной схемы определяется реализуемым принципом силомоментной адаптации. Различают три основные модели: активная силомоментная адаптация, пассивная аккомодация и «адаптивное запястье».
М одельактивной
силомоментной адаптации является
наиболее распространенной. В соответствии
с ней СМД выполняется в виде совокупности
упруго-чувствительных элементов,
измеряющих силовые факторы по трем осям
связанной с ним системы координат (рис.
7.5). Первый подобный датчик был разработан
сотрудником Массачусетского
технологического института (США) В.
Шейнманом в 1951 г. Управление приводами
исполнительного механизма
осуществляется по информации от СМД.
Системы этого типа впервые позволили
избежать заклинивания при сборке
цилиндрической пары: еще в 1976 г. П. Уотсон
осуществил установку цилиндра
диаметром 40 мм в отверстие с допуском
15 мкм за 0,2 с.
одельактивной
силомоментной адаптации является
наиболее распространенной. В соответствии
с ней СМД выполняется в виде совокупности
упруго-чувствительных элементов,
измеряющих силовые факторы по трем осям
связанной с ним системы координат (рис.
7.5). Первый подобный датчик был разработан
сотрудником Массачусетского
технологического института (США) В.
Шейнманом в 1951 г. Управление приводами
исполнительного механизма
осуществляется по информации от СМД.
Системы этого типа впервые позволили
избежать заклинивания при сборке
цилиндрической пары: еще в 1976 г. П. Уотсон
осуществил установку цилиндра
диаметром 40 мм в отверстие с допуском
15 мкм за 0,2 с.
Модель пассивной аккомодации предназначена для сборочных операций и основана на построении СМД в виде пассивного центрирующего устройства. В этом случае, измерения силовых факторов не производится, а сопряжение объектов осуществляется за счет специальной конструкции центрирующего устройства. Наиболее известная конструкция, названная устройством с вынесенным центром податливости или RCC (от англ. Remote Center Compliance), была разработана в 1972 г. сотрудником Стенфордского исследовательского института Ч. Дрейпером (рис. 76)
У стройство,
закрепленное в запястье манипулятора,
состоит из двух функциональных модулей
- силового, представляющего собой
упругий параллелограмм и моментного в
виде упругого треугольника (рис. 7.6а).
Упругие элементы (УЭ), в качестве которых
используются штыри на упругих шарнирах,
испытывают деформации изгиба под
действием четырех компонент главного
вектора сил и моментовFx,
Fy,
Mx
и My.
В ненагруженном состоянии фокус
устройства (точка f),
являющийся точкой приложения силовых
факторов и совпадающий с точкой контакта
объектов находится на оси захватного
устройства. При действии компонент Fx
и Fy
деформируются УЭ силового модуля, смещая
фокус в направлении действующей силы
(рис. 7.6б). При возникновении моментов
Mx
и My
происходит деформирование УЭ моментного
модуля, и ось устройства поворачивается
относительно оси симметрии на некоторый
угол (рис. 7.6в). В результате действия
указанных силовых факторов фокус f
всякий раз перемещается в направлении
действующей компоненты. (На рис. 7.6
показаны деформации устройства под
действием компонент Fx
и My).
В настоящее время существует много
модификаций схемы RCC.
В большинстве из них вместо штыревых
УЭ применяются эластомерные
конструкции.
стройство,
закрепленное в запястье манипулятора,
состоит из двух функциональных модулей
- силового, представляющего собой
упругий параллелограмм и моментного в
виде упругого треугольника (рис. 7.6а).
Упругие элементы (УЭ), в качестве которых
используются штыри на упругих шарнирах,
испытывают деформации изгиба под
действием четырех компонент главного
вектора сил и моментовFx,
Fy,
Mx
и My.
В ненагруженном состоянии фокус
устройства (точка f),
являющийся точкой приложения силовых
факторов и совпадающий с точкой контакта
объектов находится на оси захватного
устройства. При действии компонент Fx
и Fy
деформируются УЭ силового модуля, смещая
фокус в направлении действующей силы
(рис. 7.6б). При возникновении моментов
Mx
и My
происходит деформирование УЭ моментного
модуля, и ось устройства поворачивается
относительно оси симметрии на некоторый
угол (рис. 7.6в). В результате действия
указанных силовых факторов фокус f
всякий раз перемещается в направлении
действующей компоненты. (На рис. 7.6
показаны деформации устройства под
действием компонент Fx
и My).
В настоящее время существует много
модификаций схемы RCC.
В большинстве из них вместо штыревых
УЭ применяются эластомерные
конструкции.
Достоинствами средств пассивной аккомодации типа RCC является возможность «слепой» сборки цилиндрических объектов при начальных рассогласованиях до 1 … 3 мм и 2 … 50 и простота конструкции. В то же время, этот подход не позволяет проводить операции с контролем качества (выдержкой заданных усилий) и применим преимущественно для осевой сборки. В настоящее время подобные упругие устройства применяются совместно с соответствующими поисковыми алгоритмами. Так, сборка цилиндрической пары классу H6-G7 выполняется за 2 ... 8 с (В. Халил и П. Борель, США).
Модель адаптивного запястья, учитывающая достоинства обоих подходов, связана с использованием систем активно-пассивной адаптации (рис. 7.7). Она была разработана сотрудником фирмы Hitachi (Япония) T. Готo в 1982 г. Устройства, построенные в соответствии с данным подходом используются в сборке типа «вал-втулка» с допусками менее 2 мкм, абразивной обработке и других операциях с замкнутой кинематической цепью.
Н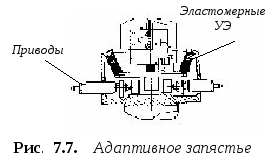 аконец,
способкосвенного
измерения
вообще не требует никакого дополнительного
оснащения манипулятора. Здесь используется
тот принцип, что если робот содержит
привода с обратимыми редукторами, то
любая сила, действующая ниже
некоторого i-го
сочленения исполнительного механизма,
оказывает влияние на все движущие
моменты, управляющие сочленениями
выше данного (рис. 7.8). Тогда, внешнее
воздействие F
можно определить, измеряя разность
между моментами в приводах (косвенно,
например, через токи двигателей) при
его наличии и отсутствии. В состоянии
равновесия имеем:
аконец,
способкосвенного
измерения
вообще не требует никакого дополнительного
оснащения манипулятора. Здесь используется
тот принцип, что если робот содержит
привода с обратимыми редукторами, то
любая сила, действующая ниже
некоторого i-го
сочленения исполнительного механизма,
оказывает влияние на все движущие
моменты, управляющие сочленениями
выше данного (рис. 7.8). Тогда, внешнее
воздействие F
можно определить, измеряя разность
между моментами в приводах (косвенно,
например, через токи двигателей) при
его наличии и отсутствии. В состоянии
равновесия имеем:
P + Г = 0,
здесь P - вектор моментов, возникающих под действием веса звеньев робота, Г - вектор моментов в сочленениях.
Сила реакции внешней среды F создает вектор момента M и уравнение равновесия изменяется:
P + Г + M = 0,
где M - вектор момента от силы F.
О ба
уравнения соответствуют одной и той же
конфигурацииq0,
когда следящая система робота поддерживает
заданные значения углов q
= q0.
Используя принцип виртуальных работ,
запишем
ба
уравнения соответствуют одной и той же
конфигурацииq0,
когда следящая система робота поддерживает
заданные значения углов q
= q0.
Используя принцип виртуальных работ,
запишем
FТ x = ГТ q + PТ q,
При этом, x = JТ(q) q. Здесь J(q) - матрица Якоби, связывающая пространство задачи с пространством обобщенных координат. Тогда получим:
FТ = ГТ J-1(q) + PТ J-1(q).
Следовательно, внешняя сила F вычисляется косвенно через моменты в приводах Г, при известной кинематической схеме манипулятора J(q) и его весовых параметрах P. Заметим, что когда манипулятор принимает сингулярную конфигурацию, при которой det J(q) = 0, производить измерения нельзя.
Этот подход, предложенный Р. Полом для сборки узлов водяного насоса в проекте «Stanford Arm», вызвал большой интерес и использовался также Х. Иноки, П. Борелем и др. Однако, очевидное достоинство способа, связанное с его практичностью и дешевизной решения не компенсируется недостатками. Важнейшее из них - неоднородность инерционных сил робота в зависимости от его конфигурации, наличия груза, упругости в шарнирах и т.д. требует очень точного моделирования динамики.