

4.2. Датчики динамических величин
К датчикам динамических величин (ДДВ) относятся информационные устройства, преобразующие изменение динамических факторов (силы, ускорения и давления) в изменение электрического сигнала.
Датчики этого типа весьма распространены в различных системах контроля и диагностики. Практически нет такой области техники, где в процессе измерения не использовались бы методы преобразования динамических параметров. Характерными задачами являются контроль параметров натяжения всевозможных лент и полос в бумажной промышленности и металлургии, измерение сил на валках клетей прокатных станов, предохранение от перегрузок в подъемных механизмах и транспортных средствах, наконец, контроль весовых и инерционных характеристик различных объектов. Использование ДДВ в системах управления и робототехнике позволяет регулировать момент на валу привода или ускорение выходного вала и реализовывать сложные законы управления звеньями исполнительного механизма.
ДДВ классифицируются по четырем основным признакам:
По назначению: датчики систем управления (к ним относятся измерители момента/силы на валу, давления в магистрали и акселерометры) и датчики контроля (в основном контроля технологических параметров и параметров безопасности).
По физическому принципу преобразования: пьезоэлектрические, магнитоупругие, тензометрические (омические), электродинамические, емкостные и индуктивные.
По способу создания противодействующей силы: датчики совмещенного преобразования (содержат электрически активный упругий преобразователь, реакция которого создается упруго-чувствительным элементом), датчики раздельного преобразования (включают электрически неактивный упругий преобразователь) и датчики с силовым уравновешиванием (сила реакция создается электрическими способами).
По виду выходной величины: генераторные («активные», выходной сигнал имеет форму заряда, напряжения или тока) и параметрические («пассивные», с выходным сигналом в виде изменения сопротивления, индуктивности и емкости).
Придерживаясь указанной классификации, рассмотрим способы построении ДДВ, основанных на наиболее известных принципах преобразования: пьезоэлектрических, магнитоупругих, емкостных и индуктивных.
4.2.1. Пьезоэлектрические датчики
П ьезоэлектрические
датчики динамических величин (ПДДВ)
представляют собой преобразователи
электрической энергии в механическую
(и наоборот). Основу ПДДВ составляют
один или несколько пьезоэлектрических
ЧЭ - пьезоэлементов,
электрически и механически связанных
между собой в измерительную схему.
Каждый пьезоэлемент выполнен в виде
кварцевой или керамической пластины
и является генераторным упруго-чувствительным
преобразователем, способным накапливать
электрическую энергию. Поэтому, при
построении измерительных цепей широко
применяются схемы последовательного
и параллельного соединения пьезоэлементов.
При последовательном соединении (рис.
4.9а) увеличивается напряжение в цепи,
а суммарная емкость уменьшается
соответственно числу ЧЭ, а при параллельном
(рис. 4.9б) увеличиваются и накопленный
заряд и емкость. Такая схема подобна
зарядовой батарее. В электрическом
смысле пьезоэлемент подобен конденсатору,
и, следовательно, он измеряет переменные
внешние воздействия. В то же время,
применением специальных схем (зарядовых
усилителей и др.) можно существенно
снизить граничные частоты (до 10-3
Гц) и повысить тем самым постоянную
времени до нескольких часов. Измерения
в этом случае получили название
квазистатических.
Таким образом, функция преобразования
ПДДВ примет вид:
F = k
i
= k
dQ/dt. В простых
расчетах полагают F
kU,
где F
- измеряемый параметр (например, сила),
i
и Q
- ток через
пьезоэлемент и его заряд.
ьезоэлектрические
датчики динамических величин (ПДДВ)
представляют собой преобразователи
электрической энергии в механическую
(и наоборот). Основу ПДДВ составляют
один или несколько пьезоэлектрических
ЧЭ - пьезоэлементов,
электрически и механически связанных
между собой в измерительную схему.
Каждый пьезоэлемент выполнен в виде
кварцевой или керамической пластины
и является генераторным упруго-чувствительным
преобразователем, способным накапливать
электрическую энергию. Поэтому, при
построении измерительных цепей широко
применяются схемы последовательного
и параллельного соединения пьезоэлементов.
При последовательном соединении (рис.
4.9а) увеличивается напряжение в цепи,
а суммарная емкость уменьшается
соответственно числу ЧЭ, а при параллельном
(рис. 4.9б) увеличиваются и накопленный
заряд и емкость. Такая схема подобна
зарядовой батарее. В электрическом
смысле пьезоэлемент подобен конденсатору,
и, следовательно, он измеряет переменные
внешние воздействия. В то же время,
применением специальных схем (зарядовых
усилителей и др.) можно существенно
снизить граничные частоты (до 10-3
Гц) и повысить тем самым постоянную
времени до нескольких часов. Измерения
в этом случае получили название
квазистатических.
Таким образом, функция преобразования
ПДДВ примет вид:
F = k
i
= k
dQ/dt. В простых
расчетах полагают F
kU,
где F
- измеряемый параметр (например, сила),
i
и Q
- ток через
пьезоэлемент и его заряд.
О братимый
характер пьезоэффекта позволяет
конструировать не только электромеханические
и механоэлектрические ПДДП, но и
преобразователи, использующие оба типа
пьезоэффекта. Так, ПДДВпрямого
пьезоэффекта
применяются в приборах для измерения
силы, давления, ускорения; ПДДВ обратного
пьезоэффекта,
используются в качестве излучателей
ультразвуковых колебаний,
преобразователей напряжения в
деформацию (в пьезоэлектрических
реле, исполнительных элементах
автоматических систем и т.д.). ПДДВ,
основанные одновременно на прямом и
обратном пьезоэффекте (к ним относятся
пьезорезонаторы, коэффициент
преобразования которых максимален
на резонансной частоте) применяются
в качестве узкополосных и резонансных
фильтров.
братимый
характер пьезоэффекта позволяет
конструировать не только электромеханические
и механоэлектрические ПДДП, но и
преобразователи, использующие оба типа
пьезоэффекта. Так, ПДДВпрямого
пьезоэффекта
применяются в приборах для измерения
силы, давления, ускорения; ПДДВ обратного
пьезоэффекта,
используются в качестве излучателей
ультразвуковых колебаний,
преобразователей напряжения в
деформацию (в пьезоэлектрических
реле, исполнительных элементах
автоматических систем и т.д.). ПДДВ,
основанные одновременно на прямом и
обратном пьезоэффекте (к ним относятся
пьезорезонаторы, коэффициент
преобразования которых максимален
на резонансной частоте) применяются
в качестве узкополосных и резонансных
фильтров.
В большинстве
случаев при построении ПДДВ
используется несколько ЧЭ в виде
кварцевых дисков, ориентированных
вдоль одной или нескольких осей
декартовой системы координат и
соединенных таким образом, чтобы
выходной сигнал каждого был максимальным
(рис. 4.10). Так, для датчиков силы, верхняя
граница измеряемого усилия
определяется площадью нагружаемой
поверхности и для промышленных образцов
составляет (2
…. 200) кН. Чувствительность такого диска
зависит от типа пьезоэффекта и
определяется значениями пьезоэлектрических
коэффициентов dij.
В частности (как отмечалось в разд.
2.1.5), матрица п ьезомодулей
кварца содержит только 5 коэффициентов
и чувствительность пьезоэлемента
Х-среза к растяжению-сжатию (при
отсутствии паразитных боковых
воздействий) проявляется через
коэффициентd11.
Аналогично, пьезоэлемент Y-среза
чувствителен к сдвигу (коэффициент
d26).
Следовательно, применяя ЧЭ разных
срезов можно построить многокомпонентный
датчик силы. Метрологические характеристики
ПДДВ, как правило, очень высокие. Для
них характерна высокая линейность
(вследствие высокой жесткости конструкции)
и малая зона нечувствительности.
ьезомодулей
кварца содержит только 5 коэффициентов
и чувствительность пьезоэлемента
Х-среза к растяжению-сжатию (при
отсутствии паразитных боковых
воздействий) проявляется через
коэффициентd11.
Аналогично, пьезоэлемент Y-среза
чувствителен к сдвигу (коэффициент
d26).
Следовательно, применяя ЧЭ разных
срезов можно построить многокомпонентный
датчик силы. Метрологические характеристики
ПДДВ, как правило, очень высокие. Для
них характерна высокая линейность
(вследствие высокой жесткости конструкции)
и малая зона нечувствительности.
Простейший ПДДВ представляет собой совокупность кварцевых или пьезокерамических пластин (рис. 4.11а) или колец, установленных соосно. (Обычно вместо дисков используются кольца). Каждое кольцо ПДДВ, представляющее собой совмещенный упруго-чувствительный элемент X-среза, работает на продольном пьезоэффекте (как известно, в этом случае плотность заряда не зависит от геометрических размеров кольца). Одна из наиболее известных конструкций ПДДВ этого типа была разработана фирмой Hellwett-Packard. Датчик состоял из двух колец, включенных последовательно относительно силы и параллельно электрически (такое соединение получило название конденсаторного). Верхний предел измерения составлял 1000 кН при диаметре датчика равном 10 см. Соединяя два таких датчика можно увеличить чувствительность конструкции, правда, с потерей жесткости.
П ромышленностью
выпускаются различные пьезокерамические
материалы, позволяющие конструировать
высокочувствительные датчики. Так,
серийные пьезокерамические диски
из материала ЦТС-19 имеют крутизнуku
1 ... 5 В/Н.
ромышленностью
выпускаются различные пьезокерамические
материалы, позволяющие конструировать
высокочувствительные датчики. Так,
серийные пьезокерамические диски
из материала ЦТС-19 имеют крутизнуku
1 ... 5 В/Н.
Существенный недостаток простых конструкций связан с эффектом стекания заряда, вызывающим постепенное уменьшение сигнала при статических измерениях. Этот эффект приводит к невозможности использования таких схем при длительных измерениях. (Как уже отмечалось, постоянная времени ПДДВ = 103 сек, при типичной емкости датчика Cд 100 пФ и суммарном сопротивлении изоляции Rиз 1013 Ом). Следовательно, нижняя частотная граница измеряемого сигнала составит fн = н /2 = 1,6 10-4 Гц. Поэтому, при статических измерениях уже через 10 с погрешность превысит 0,1%.
Для устранения
эффекта стекания заряда ПДДВ строят
по схеме пьезоэлектрического
трансформатора
переменного тока, работающие, в
зависимости от резонансной частоты, в
диапазонах от 20 Гц до 200 кГц. Одна из
первых конструкций поперечно-продольного
повышающего пьезотрансформатора,
предложенная С.А. Розеном приведена
на рис. 4.11б. Устройство состоит из двух
секций -входной и выходной. Направления
поляризации показаны стрелками.
Коэффициент трансформации подобных
систем, включенных в режиме Т-образного
четырехполюсника, достигает 1000 единиц
и более. На рис. 4.12 представлена схема
использования трансформаторного ПДДВ
в качестве датчика статической силы.
Особенностью конструкции является
использование трех обкладок, одной
общей для входной и выходной цепи и
двух изолированных. Переменное напряжение
Uи
подзаряжает датчик, при этом уровень
выходного сигнала Uи
пропорционален
величине измеряемой силы.В последние
годы в информационных системах все
чаще применяются резонаторные
ПДДВ, в том числе, основанные на
эффекте возбуждения поверхностных
акустических волн. Резонаторные датчики
выполняются в виде двухполюсника,
объединяющего систему электрического
возбуждения механических колебаний
и съема электрического сигнала. Если
частота приложенного напряжения
совпадает с одной из собственных
механических частот датчика, то возникнет
резонанс, сопровождающийся резким
уменьшением полного сопротивления Z
и у величением
тока через резонатор. Спектр колебаний
определяется размером, конструкцией
и упругими свойствами материала.
Резонансные свойства ПДДВ зависят от
его добротностиQ
= 2
fр
Lэ/Rд,
где fр
- резонансная
частота, Lэ
и Rд
- соответственно эквивалентная
индуктивность резонатора и его
динамическое активное сопротивление.
Наивысшей добротностью Q
= 107
обладают кварцевые резонаторы (для
сравнения Q
колебательного контура = 102,
Q
пьезокерамического резонатора = 103).
Полное сопротивление принимает два
экстремальных значения на частотах
fр
и fа,
называемые частотами резонанса и
антирезонанса.
величением
тока через резонатор. Спектр колебаний
определяется размером, конструкцией
и упругими свойствами материала.
Резонансные свойства ПДДВ зависят от
его добротностиQ
= 2
fр
Lэ/Rд,
где fр
- резонансная
частота, Lэ
и Rд
- соответственно эквивалентная
индуктивность резонатора и его
динамическое активное сопротивление.
Наивысшей добротностью Q
= 107
обладают кварцевые резонаторы (для
сравнения Q
колебательного контура = 102,
Q
пьезокерамического резонатора = 103).
Полное сопротивление принимает два
экстремальных значения на частотах
fр
и fа,
называемые частотами резонанса и
антирезонанса.
Резонаторные ПДДВ обычно включаются в измерительные схемы, использующие частотную или временную модуляцию сигналов.
П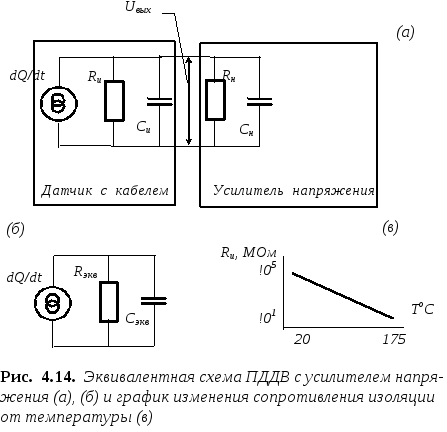 ри
расчете ПДДВ и выбора компонентов
измерительной цепи широко используютсяэквивалентные
схемы,
учитывающие особенности работы прибора.
Простая схема включения ПДДВ предполагает
использование следующих электрических
компонентов: собственно пьезоэлемента,
обладающего некоторым импедансом,
обкладок, подводящих проводов, а также
последующего усилителя сигнала. Как
отмечалось в разд. 1.1 ПДДВ относится к
датчикам второго порядка, и, следовательно,
его свойства зависят от рабочей частоты.
Поэтому, и эквивалентная схема ПДДВ
имеет разный вид на разных рабочих
частотах. (Действительно, такие параметры,
как сопротивление утечки, изоляции и
т.д. зависят от используемого диапазона
частот). Наибольшее распространение
получила эквивалентная схема Тевенина
(рис. 4.13б), и ее упрощенный вариант
(рис.4.13в), составленный в предположении,
что сопротивление изоляции пьезоматериала
достаточно велико. Заметим, что импеданс
ПДДВ на малых частотах в основном
определяется активной составляющей
сопротивления изоляции, в то время
как на средних и высоких частотах
проявляются реактивные составляющие.
На рис. 4.13 обозначено: Rд
- сопротивление изоляции (оно
соответствует импедансу датчика
на малых частотах),
Cд
- импеданс датчика на средних и высоких
частотах, Rк,
Cк
- сопротивление и емкость
коаксиального кабеля. Сопротивление
и емкость изоляции Rи,
Cи
определяются зависимостями:
ри
расчете ПДДВ и выбора компонентов
измерительной цепи широко используютсяэквивалентные
схемы,
учитывающие особенности работы прибора.
Простая схема включения ПДДВ предполагает
использование следующих электрических
компонентов: собственно пьезоэлемента,
обладающего некоторым импедансом,
обкладок, подводящих проводов, а также
последующего усилителя сигнала. Как
отмечалось в разд. 1.1 ПДДВ относится к
датчикам второго порядка, и, следовательно,
его свойства зависят от рабочей частоты.
Поэтому, и эквивалентная схема ПДДВ
имеет разный вид на разных рабочих
частотах. (Действительно, такие параметры,
как сопротивление утечки, изоляции и
т.д. зависят от используемого диапазона
частот). Наибольшее распространение
получила эквивалентная схема Тевенина
(рис. 4.13б), и ее упрощенный вариант
(рис.4.13в), составленный в предположении,
что сопротивление изоляции пьезоматериала
достаточно велико. Заметим, что импеданс
ПДДВ на малых частотах в основном
определяется активной составляющей
сопротивления изоляции, в то время
как на средних и высоких частотах
проявляются реактивные составляющие.
На рис. 4.13 обозначено: Rд
- сопротивление изоляции (оно
соответствует импедансу датчика
на малых частотах),
Cд
- импеданс датчика на средних и высоких
частотах, Rк,
Cк
- сопротивление и емкость
коаксиального кабеля. Сопротивление
и емкость изоляции Rи,
Cи
определяются зависимостями:
1/Rи = 1/Rд + 1/Rк и Cи = Cд + Cк
Н агрузкой
для ППДВ обычно служит усилитель заряда
или напряжения свысокоомным
входным сопротивлением. Его эквивалентная
схема также представляется параллельным
соединением резистора Rн
и конденсатора Cн.
Таким образом, суммарная эквивалентная
измерительная схема, включающая все
элементы цепи примет вид представленный
на рис. 4.14а. Эквивалентные сопротивление
и емкость измерительной схемы (рис.
4.14б) равны соответственно:
агрузкой
для ППДВ обычно служит усилитель заряда
или напряжения свысокоомным
входным сопротивлением. Его эквивалентная
схема также представляется параллельным
соединением резистора Rн
и конденсатора Cн.
Таким образом, суммарная эквивалентная
измерительная схема, включающая все
элементы цепи примет вид представленный
на рис. 4.14а. Эквивалентные сопротивление
и емкость измерительной схемы (рис.
4.14б) равны соответственно:
![]() ,Cэкв
= Си
+ Сн.
Характеристики ПДДВ определяются
стабильностью параметров элементов
образующих схему. Поэтому, для точных
измерений недопустимо заменять отдельные
элементы, даже на функционально подобные.
(Так, в [ ] приведен пример, показывающий,
что чувствительность датчика с
Сд
= 1000 пФ снижается на 11% при подключении
усилителя с Сн
= 10 пФ коаксиальным кабелем длиной
1 м с Ск
= 100 пФ/м). Кроме того, параметры всех
элементов зависят от температуры,
например, сопротивление изоляции
Rд
уменьшается на порядок каждые 33 оС
(рис. 4.14в).
,Cэкв
= Си
+ Сн.
Характеристики ПДДВ определяются
стабильностью параметров элементов
образующих схему. Поэтому, для точных
измерений недопустимо заменять отдельные
элементы, даже на функционально подобные.
(Так, в [ ] приведен пример, показывающий,
что чувствительность датчика с
Сд
= 1000 пФ снижается на 11% при подключении
усилителя с Сн
= 10 пФ коаксиальным кабелем длиной
1 м с Ск
= 100 пФ/м). Кроме того, параметры всех
элементов зависят от температуры,
например, сопротивление изоляции
Rд
уменьшается на порядок каждые 33 оС
(рис. 4.14в).
В ПДДВ используются измерительные схемы как генераторного, так и параметрического типов. Наиболее известными генераторными схемами являются усилители с высокоомным входом или специальные зарядовые усилители. Параметрические измерительные цепи строятся на основе мостовых схем.
В датчиках сил и аксельрометрах чаще всего используются усилители переменного тока с высоким входным сопротивлением (не менее 500 Мом) и относительно невысоким усилением 10 (рис. 4.15). Надежность схемы определяется стабильностью всех элементов, особенно конденсатора С1. Благодаря нему все изменения заряда Q, вызванные действием ускорений передаются на вход усилителя. Коэффициент преобразования измерительной схемы равен:
 ,
,
Усилитель необходимо размещать вблизи датчика.
Зарядовый усилитель (рис. 4.16а) представляет собой достаточно сложный функциональный преобразователь «заряд - напряжение».
 Первый блок
(собственно преобразователь заряда)
обычно устанавливается совместно (в
одном корпусе) с ПДДВ. Последующие
каскады, выполняющие функции согласования
и фильтрации сигналов, могут быть
отнесены от первого блока на некоторое
расстояние. Эквивалентная схема
зарядового усилителя представлена на
рис. 4.16б. На практике для измерения
квазистатических сигналов
стремятся максимально поднять постоянную
времени
= RиCу,
однако при этом возрастают пироэлектрические
шумы датчика, а также шумы линии связи.
Функция преобразования ПДДВ с зарядовым
усилителем в области низких частот
имеет вид:
Первый блок
(собственно преобразователь заряда)
обычно устанавливается совместно (в
одном корпусе) с ПДДВ. Последующие
каскады, выполняющие функции согласования
и фильтрации сигналов, могут быть
отнесены от первого блока на некоторое
расстояние. Эквивалентная схема
зарядового усилителя представлена на
рис. 4.16б. На практике для измерения
квазистатических сигналов
стремятся максимально поднять постоянную
времени
= RиCу,
однако при этом возрастают пироэлектрические
шумы датчика, а также шумы линии связи.
Функция преобразования ПДДВ с зарядовым
усилителем в области низких частот
имеет вид:
![]() .
.
Пьезоэлементы
могут объединяться в измерительную
схему не только генераторного, но и
параметрического типа. За последние
годы появились новые технологические
приемы, позволяющие выращивать
пьезоэлектрические структуры
непосредственно на поверхности упругого
элемента. Данные технологии, широко
применяемые в тензометрических
измерительных системах, теперь позволяют
строить интегральные ПДДВ по схеме
раздельного преобразования. В частности,
подобные датчики силы, давления,
аксельрометры разработаны фирмой
«Honeywell»,
США (рис. 4.17). Во всех датчиках используются
пьезорезистивные диффузионные ЧЭ,
объединенные в мостовую
измерительную
схему. Упругим элементом, на котором
расположены четыре ЧЭ, служит кремниевая
диафрагма. С целью с нижения
погрешности предусмотрены меры по
компенсации смещения нуля и изменения
температурной чувствительности. Для
этого используются внешние навесные
элементы, а питание датчиков осуществляется
от источника тока. На рис. 4.17 представлен
пример включения датчика усилий серииFS
с регулировкой смещения нуля и
чувствительности. Интегральная
измерительная цепь содержит усилитель
с буферными каскадами (разд. 2.3). Выходной
сигнал ПДДВ определяется выражением:
Uвых
= (U2
– U4)
(1+2R/R1)
+ Uсм.
нижения
погрешности предусмотрены меры по
компенсации смещения нуля и изменения
температурной чувствительности. Для
этого используются внешние навесные
элементы, а питание датчиков осуществляется
от источника тока. На рис. 4.17 представлен
пример включения датчика усилий серииFS
с регулировкой смещения нуля и
чувствительности. Интегральная
измерительная цепь содержит усилитель
с буферными каскадами (разд. 2.3). Выходной
сигнал ПДДВ определяется выражением:
Uвых
= (U2
– U4)
(1+2R/R1)
+ Uсм.
В завершение приведем характеристики некоторых моделей ПДДВ (табл. 4.5).
Таблица 4.5. Примеры промышленных ПДДВ
|
Модель |
Измеряемый параметр |
Диапазон |
S |
, % |
Размеры, мм |
m, кг |
|
ДХП 096 |
Звуковое давление |
0 ... 80 кГц |
4мкВ/Па |
2 |
425 |
0,005 |
|
ДПС 003 |
Динамическое давление |
0 ... 5 106 Па (f до 25 кГц) |
1 10-4 мВ/Па |
10 |
2755 |
0,25 |
|
АЛО 034 |
Ускорение |
0 ... 6 м/с2 |
1 В/м/с2 |
1 |
464647 |
0,4 |
|
|
Вибрации |
0 ... 1000 g |
10 мВ/g |
|
2025 |
0,005 |
|
K 9077 |
Усилия (Fx, Fy, Fz) |
0 ... 88 кН (Fx, Fy) 0 ... 200 кН (Fz) |
3,7 пКл/Н (Fx,Fy) 2 пКл/Н (Fz) |
1 (1) 3* |
10025 |
0,9 |
|
FSG15N1 |
Усилие |
15 Н |
0,24 мВ/г |
1,5 |
12,789 |
0,1 |
|
К 9233 |
Деформация |
0 ... 300 мСт |
6 пКл/мСт |
1 (2) |
304054 |
0,21 |
Примечание.
Модели K 9077 и К9233 разработаны фирмой Kistler, Германия, FSG15N1 -фирмой Honeywell.
* Погрешности датчиков K 9077, К 9233: 1% - линейность, в скобках - гистерезис, 3% - перекрестные влияния.
1 мСт (microstrain, ) единица применяемая фирмой Kistler для обозначения относительного удлинения 1 = 10-6 м/м.
ПДДВ в измерительных системах используются чрезвычайно широко. Их достоинства: высокая механическая жесткость, широкий диапазон измерения (для сил 10-1 Н ... 106 Н), малые габариты и вес, а также стабильность характеристик сделали их основой большинства силоизмерительных установок. Некоторые модели стали базовыми. Такой моделью, в частности, явился датчик силы фирмы Hellwett-Packard с двумя пластинами толщиной 1 мм. При механическом напряжении 15 кг/мм2 его деформация составляет всего 2 10-3 мкм. Однако, ПДДВ не лишены и недостатков. В первую очередь, это зависимость точности измерения от частоты входного сигнала и чувствительность к загрязнению, температуре и влажности.