

2.11. Тормозные режимы работы двигателей постоянного тока
При торможении двигатель выполняет следующие функции:
ограничивает скорость вращения рабочего механизма;
обеспечивает быструю и точную остановку механизма.
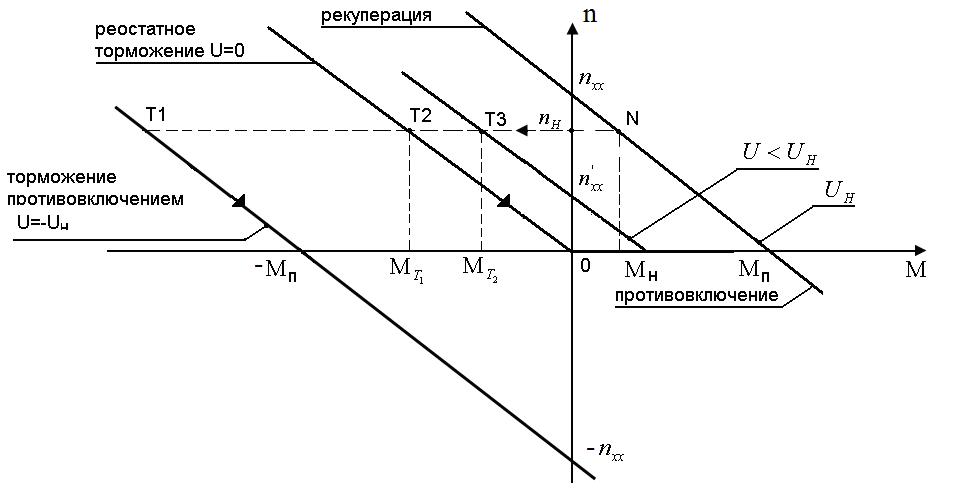
Рис. 2.13
На рисунке 2.13 изображены основные тормозные режимы ДПТ.
Из предыдущих параграфов известно, что для ДПТ
![]() ,(2.17)
,(2.17)
![]() ,(2.19)
,(2.19)
![]() . (2.12).
. (2.12).
При реализации электромагнитного торможения необходимо, чтобы при неизменном направлении вращения механизма изменился знак электромагнитного момента, либо при неизменном знаке электромагнитного момента изменилось направление вращения якоря двигателя. Существует ряд способов электромагнитного торможения двигателя.
1.
Генераторное
(рекуперативное) торможение.
В этом случае при разгоне механизма
обороты двигателя становятся больше
оборотов идеального холостого хода.
При этом противоЭДС двигателя становится
больше напряжение питания и
![]() ,
момент меняет знак в соответствии с
(2.19) и (2.12). Такое торможение можно создать
также путем снижения напряжения питания
якоря до уровня, при котором новое
значение оборотов
,
момент меняет знак в соответствии с
(2.19) и (2.12). Такое торможение можно создать
также путем снижения напряжения питания
якоря до уровня, при котором новое
значение оборотов
![]() идеального холостого хода станет меньше
номинального, т.е.
идеального холостого хода станет меньше
номинального, т.е.
![]() .
Достоинства такого торможения - высокая
экономичность.
.
Достоинства такого торможения - высокая
экономичность.
2. Торможение противовключением возможно двумя способами:
а)
полярность питающего якорь напряжения
меняется на противоположное. Тогда,
![]() >>
>>
![]() .
Момент М,
как и ток якоря также становится
отрицательным(тормозящим).
.
Момент М,
как и ток якоря также становится
отрицательным(тормозящим).
б)
путем изменения полярности противоЭДС
двигателя. При этом момент нагрузки,
преодолев пусковой момент двигателя
Мп,
начинает раскручивать его якорь в
противоположную сторону, т.е. n<0
и
![]() =
=![]() >>
>>![]() .
.
3. При реостатном торможении напряжение питания отключается от якоря, а якорь «закорачивается» на сопротивление реостата. В образовавшемся контуре ток якоря под действием противоЭДС двигателя начинает протекать в противоположном ранее направлению, что и обуславливает появление тормозящего электромагнитного момента вплоть до полной остановки механизма.
2.12. Технические системы для управления двигателями постоянного тока
Известные способы управления – якорное и полюсное реализируются в следующих технических системах:
Система «Генератор-двигатель»(Г-Д). В этом случае при неизменных оборотах стороннего двигателя, вращающего вал генератора, за счет изменения потока возбуждения генератора, меняется ЭДС и, следовательно, напряжение питания двигателя
 .
Такой способ управления экономически
оправдан при групповом управлении
двигателей от одного генератора
(двигатели гребных винтов судов,
прокатных станов и т.п.)
.
Такой способ управления экономически
оправдан при групповом управлении
двигателей от одного генератора
(двигатели гребных винтов судов,
прокатных станов и т.п.)
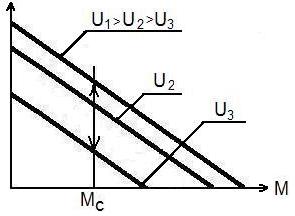
Рис.2.14. Семейство механических характеристик двигателя
При постоянной нагрузке MС угловая скорость ω двигателя линейно зависит от напряжения на якоре (рис. 2.14).
Система «Управляемый выпрямитель-двигатель»(УВ-Д).
Система «Широтно - импульсный преобразователь - двигатель»
(ШИП-Д).
В системах 2 и 3 меняется среднее значение напряжения на выходе преобразователя, к которому подключен якорь двигателя.
Система «Магнитный усилитель-двигатель»(МУ-Д).
Рассмотрим кратко систему УВ-Д при однофазном питании управляемого выпрямителя (рис.2.15), где сокращенно обозначены:
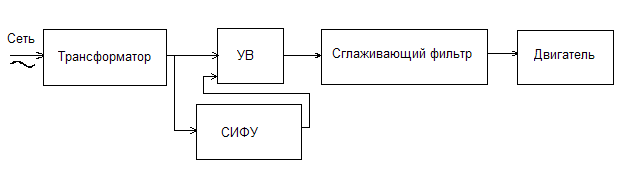
Рис.2.15. Структурная схема системы УВ-Д
УВ – мостовой управляемый выпрямитель.
СИФУ – система импульсно-фазового управления УВ.
При питании двигателя от трёхфазной сети с помощью двухполупериодного управляемого выпрямителя сглаживающий фильтр не нужен.
Принципиальная схема силовой части УВ - Д показана на рис.2.16,где использованы следующие обозначения.
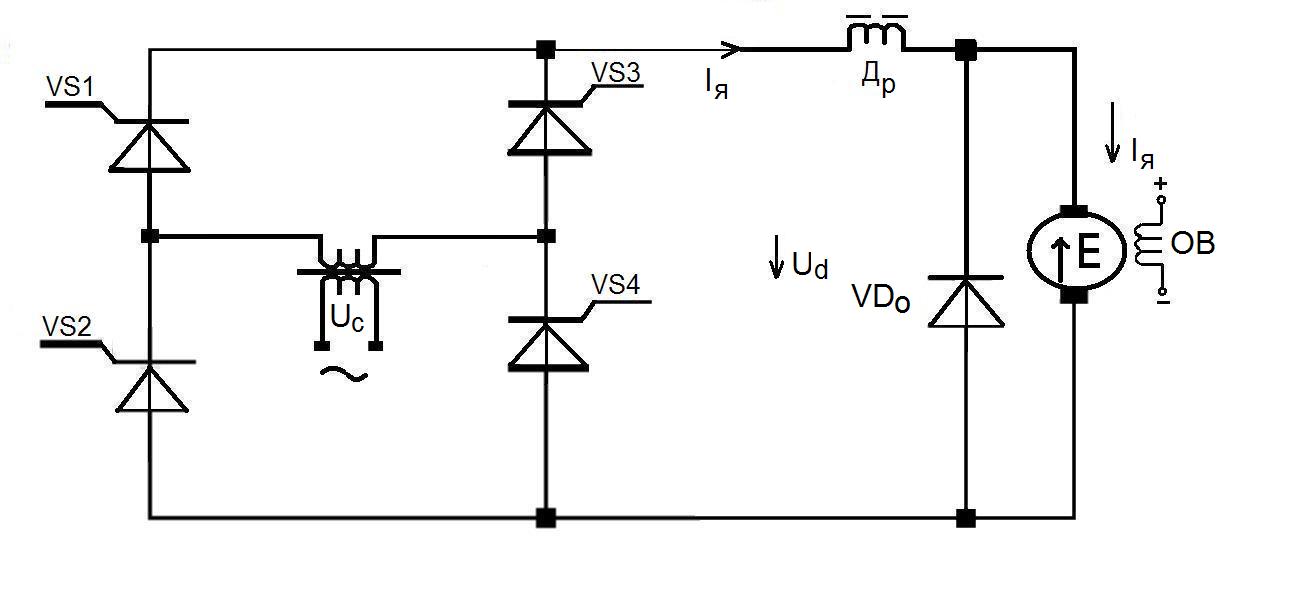
Рис.2.16
![]() р
– дроссель,
р
– дроссель,
![]() – вентиль нулевого тока, через который
протекает
– вентиль нулевого тока, через который
протекает
![]() после
того, как выпрямленное напряжение
Ud
станет меньше противоэдс двигателя
E=CenФ.
Когда Ud
после
того, как выпрямленное напряжение
Ud
станет меньше противоэдс двигателя
E=CenФ.
Когда Ud
![]() открытая пара тиристоров (VS1,
VS4
или VS2,
VS3
) закрывается. На рис. 2.17 показаны
осциллограммы ряда величин, характеризующие
работу системы УВ-Д. Заштрихованные
участки соответствуют временным
интервалам протекания тока через
тиристоры УВ.
открытая пара тиристоров (VS1,
VS4
или VS2,
VS3
) закрывается. На рис. 2.17 показаны
осциллограммы ряда величин, характеризующие
работу системы УВ-Д. Заштрихованные
участки соответствуют временным
интервалам протекания тока через
тиристоры УВ.

![]()
Рис. 2.17
Синхроимпульсы
СИФУ формируются в моменты перехода
![]() через
0, сдвигаются на заданную фазу и управляют
моментом включения силовых тиристоров
VS1-
VS4
мостовой схемы. Тем самым изменяется
среднее значение напряжения Ud
на выходе
моста. Дроссель
р
уменьшает
пульсацию тока якоря, а вентиль нулевого
тока
обеспечивает
замыкание тока якоря на интервале
времени, когда противоэдс Е превышает
мгновенные значения напряжения Ud
(в эти интервалы времени все тиристоры
моста заперты, а ток из-за индуктивности
обмотки якоря скачком оборваться не
может).
через
0, сдвигаются на заданную фазу и управляют
моментом включения силовых тиристоров
VS1-
VS4
мостовой схемы. Тем самым изменяется
среднее значение напряжения Ud
на выходе
моста. Дроссель
р
уменьшает
пульсацию тока якоря, а вентиль нулевого
тока
обеспечивает
замыкание тока якоря на интервале
времени, когда противоэдс Е превышает
мгновенные значения напряжения Ud
(в эти интервалы времени все тиристоры
моста заперты, а ток из-за индуктивности
обмотки якоря скачком оборваться не
может).
Упрощенная принципиальная схема силовой части системы ШИП-Д показана на рис.2.18.
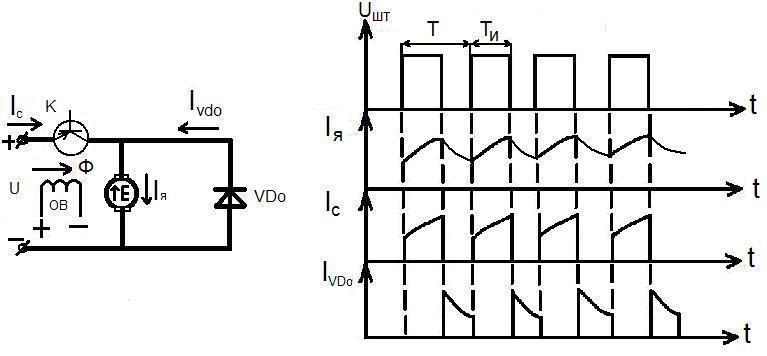
Рис.2.18 Рис.2.19
По
первому закону Кирхгофа
![]() .
.
![]() -
частота коммутации транзисторного
ключа К.
-
частота коммутации транзисторного
ключа К.
Осциллограммы установившегося режима работы силовой части системы ШИП-Д показаны на рис. 2.19. Уравнение механической характеристики двигателя в системе ШИП-Д
![]() ,
,
где
Kэм
-
электромагнитный коэффициент, определяемый
по данным технического паспорта,
![]() –
коэффициент продолжительности включения,
–
коэффициент продолжительности включения,
![]() .
При выборе
.
При выборе
![]() необходимо учитывать, что граничная
величина среднего значения тока якоря,
при которой наступает «неприятный» для
двигателя режим прерывистого тока
якоря, связана с пусковым током
необходимо учитывать, что граничная
величина среднего значения тока якоря,
при которой наступает «неприятный» для
двигателя режим прерывистого тока
якоря, связана с пусковым током
![]() формулой
формулой
![]() ,
,
где
![]() -
пусковой ток.
-
пусковой ток.
При
![]() механические характеристики двигателя
постоянного тока независимого и
параллельного возбуждения становятся
нелинейными, что неблагоприятно
сказывается на точности управления.
Поэтому необходимо минимизировать
величину
механические характеристики двигателя
постоянного тока независимого и
параллельного возбуждения становятся
нелинейными, что неблагоприятно
сказывается на точности управления.
Поэтому необходимо минимизировать
величину
![]() .
Если принять коэффициент
.
Если принять коэффициент
![]() равным 0.5, то выражение для
принимает вид
равным 0.5, то выражение для
принимает вид
![]() .
.
Увеличивать
![]() для минимизации
путём включения дросселя в цепь якоря
нецелесообразно, т.к. это снижает
быстродействие системы с двигателем.
Наиболее целесообразно увеличивать
частоту коммутации ШИП до 15-20 кГц.
для минимизации
путём включения дросселя в цепь якоря
нецелесообразно, т.к. это снижает
быстродействие системы с двигателем.
Наиболее целесообразно увеличивать
частоту коммутации ШИП до 15-20 кГц.