

2.3. Работа мпт в режиме генератора
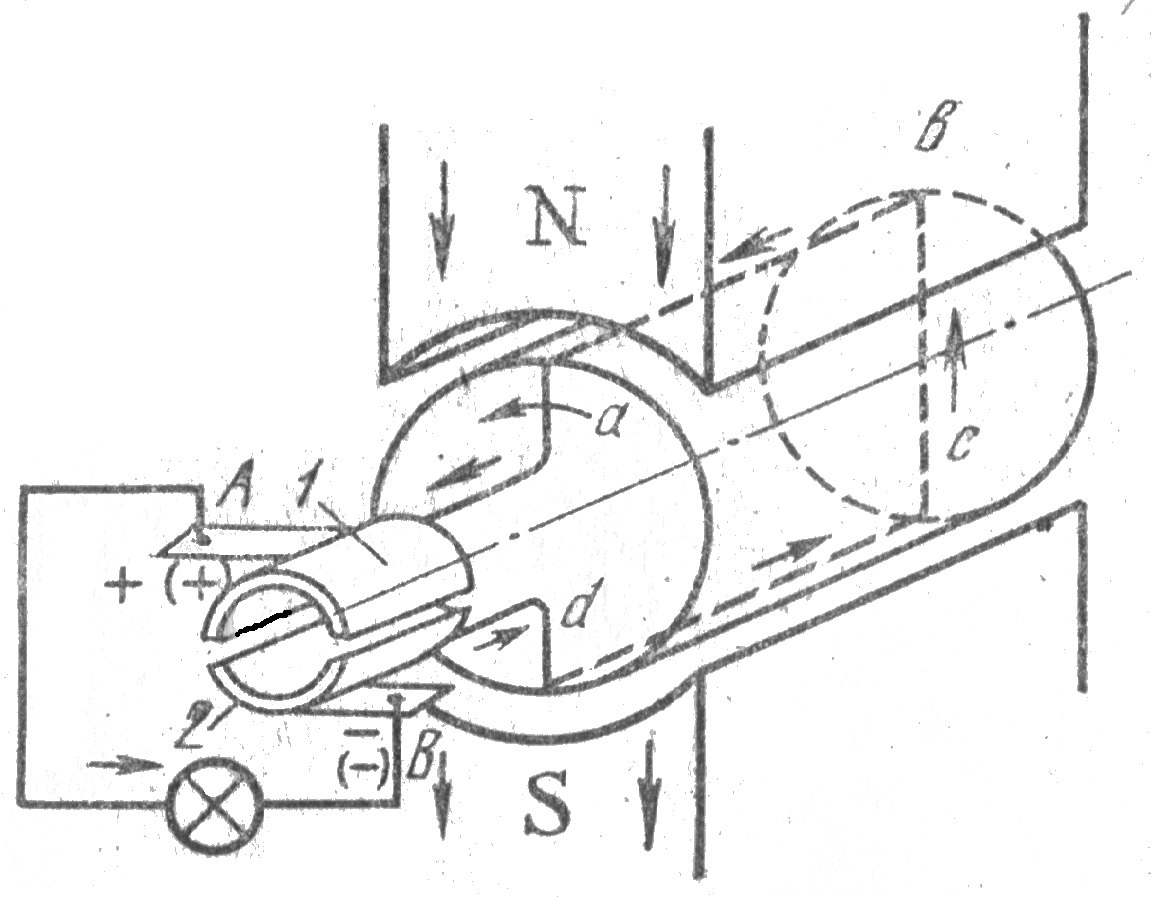
Рис. 2.3
На
рис. 2.3 обмотка якоря состоит из одного
витка abcd, концы которого подключены к
изолированным друг от друга полукольцам,
образующим простейший коллектор. При
вращении витка сторонним двигателем с
частотой n в нем наводится ЭДС в
соответствии с формулой (1.18). Закон
изменения нормальной составляющей
индукции в рабочем зазоре близок к
синусоидальному. В вертикальном положении
витка на рис. 2.3
![]() .
.
В
горизонтальном положении витка
![]() .
Когда проводник ab переходит при вращении
под другой полюс, знак ЭДС меняется на
противоположный. Следовательно, в рамке
при вращении наводится переменная
синусоидальная ЭДС.
.
Когда проводник ab переходит при вращении
под другой полюс, знак ЭДС меняется на
противоположный. Следовательно, в рамке
при вращении наводится переменная
синусоидальная ЭДС.
Ввиду того, что вместе с витком abcd вращаются коллекторные пластины, а щетки остаются неподвижными, ЭДС относительно щеток не меняется по ”направлению”, т.е. щеточно-коллекторный узел является в генераторе механическим выпрямителем. Для уменьшения пульсаций напряжения на щетках обмотку якоря выполняют из большого числа рамок (секций), сдвинутых в пространстве на определенный угол друг относительно друга и подключенных к своим пластинам коллектора. При восьми коллекторных пластинах на полюс пульсация составляет 1% от Uср. Каждой паре полюсов статора соответствует пара щеток, из которых одноименные по знаку напряжения соединяются между собой последовательно-параллельно.
2.4. Эдс генератора
Среднее значение ЭДС генератора определяется соотношением:
![]() ,
(2.2)
,
(2.2)
где N – общее число секций (рамок) на якоре; 2а – число параллельных ветвей, образованных секциями обмотки якоря.
В одну ветвь объединяются секции, в которых ЭДС имеет один знак, т.е. такие секции, которые находятся под одним полюсом.
Среднее
значение ЭДС в одной рамке
![]() ,
(2.3)
,
(2.3)
где:
![]() – скорость перемещения “активной”
стороны рамки,
– скорость перемещения “активной”
стороны рамки,
![]() (2.4)
(2.4)
n – частота вращения якоря; D – диаметр якоря; l – длина пакета якоря.
Среднее
значение индукции
![]() ,
(2.5)
,
(2.5)
где
Ф – магнитный поток полюса;
![]() -
сечение полюса статора
-
сечение полюса статора
![]() (2.6)
(2.6)
- размер полюсного деления; р – число пар полюсов статора.
Подставив уравнения (2.4), (2.5), (2.6) в (2.3), получим
 (2.7)
(2.7)
Подставим формулу (2.7) в (2.2)
![]() (2.8)
(2.8)
где
![]() – конструктивная константа при расчете
ЭДС.
– конструктивная константа при расчете
ЭДС.
2.5. Классификация генераторов
По способу возбуждения генераторы делятся на две группы:
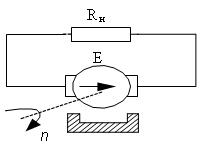
Рис. 2.4
а) генераторы с независимым возбуждением, ОВ которых питается от внешнего источника постоянного тока. У генераторов малой мощности поток Ф создается постоянными магнитами, обычно закрепленными на статоре (рис. 2.4);
б) генераторы с самовозбуждением, ОВ которых питается от самого генератора. В свою очередь такие генераторы в соответствии со схемой подключения обмотки якоря (ОЯ) и ОВ делятся на следующие виды:
– генераторы параллельного возбуждения (рис. 2.5);
– генераторы последовательного возбуждения (рис. 2.6);

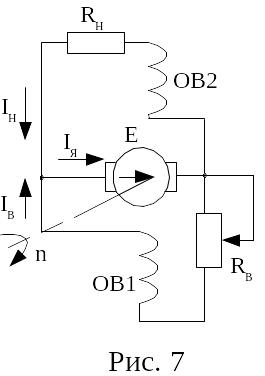
Рис.
2.5 


 Рис. 2.6
Рис. 2.7
Рис. 2.6
Рис. 2.7
– генераторы смешанного возбуждения (рис. 2.7).
У генератора смешанного возбуждения имеются две обмотки возбуждения:
– обмотка параллельного возбуждения ОВ1;
– обмотка последовательного возбуждения ОВ2.
Потоки обмоток ОВ1 и ОВ2 складываются (направлены согласно). По ОВ2 течет ток нагрузки IН, который практически равен току якоря, т.к. ОВ1 – многовитковая обмотка с большим сопротивлением и IB<<IH.
Под процессом самовозбуждения генератора понимают процесс наведения номинальной ЭДС в ОЯ, когда источником питания ОВ1 является сам генератор.Процесс самовозбуждения генератора основан на явлении остаточного намагничивания ферромагнитных материалов, из которых выполнена машина (стальной корпус, “железо” якоря и полюсов). Его осуществляют на холостом ходу генератора при закороченном регулировочном реостате RB.

Рис. 2.8
Наибольшее
распространение получили генераторы
с параллельным возбуждением. Для них в
соответствии со вторым законом Кирхгофа
можно записать
![]() .
Поэтому напряжение в нагрузке
.
Поэтому напряжение в нагрузке
![]() .
(2.9)
.
(2.9)
Это выражение называют внешней характеристикой генератора. Вид ее для генератора независимого возбуждения показан на рис. 2.8 (кривая 1). Падение напряжения на щетках мало, поэтому в формуле (2.9) им пренебрегли. Внешняя характеристика генератора снимается при n =const. В генераторах смешанного возбуждения ОВ2 при токах I<I ном частично компенсирует падение напряжения на ОЯ за счет роста Е при увеличении тока нагрузки (кривая 3 на рис. 2.8).