

1.3. Основные законы, лежащие в основе анализа работы электрических машин
Несмотря на широкое функциональное и конструктивное разнообразие электрических машин их принцип действия основывается на двух фундаментальных законах.
Закон
электромагнитной индукции
определяет, какая ЭДС наводится в рамке,
движущейся со скоростью
![]() в магнитном поле с индукцией
в магнитном поле с индукцией
![]() и (или) возникающей в неподвижной рамке,
сцепляющейся с изменяющимся во времени
потоком Ф
и (или) возникающей в неподвижной рамке,
сцепляющейся с изменяющимся во времени
потоком Ф
![]() ,
(1.17)
,
(1.17)
где
d![]() -
элемент длины рамки.
-
элемент длины рамки.
Второе слагаемое уравнения (1.17) для однородного поля имеет вид
![]() (1.18)
, где
(1.18)
, где
![]() .
.
Знак ЭДС определяется известным правилом правой руки [1].
Закон Ампера. В соответствии с ним на проводник длиной l и током I, находящийся в магнитном поле, действует выталкивающая сила
![]() .
(1.19)
.
(1.19)
В
однородном магнитном поле
![]() .
.
Направление силы F определяют по правилу левой руки.
2. Электрические машины постоянного тока
2.1. Классификация электрических машин
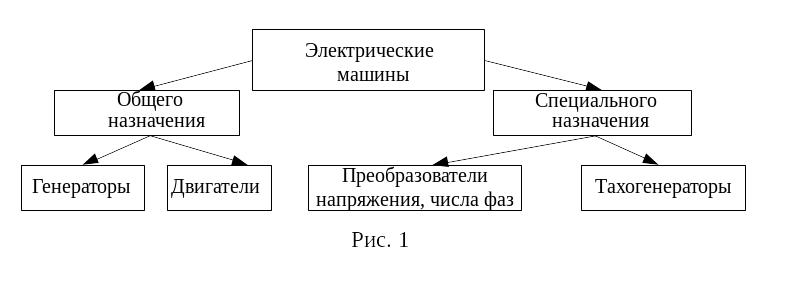
Рис. 2.1
По выполняемым функциям электрические машины (ЭМ) можно разделить на машины общего и специального назначения (рис. 2.1).
В свою очередь, ЭМ общего назначения можно классифицировать следующим образом (рис. 2.2).
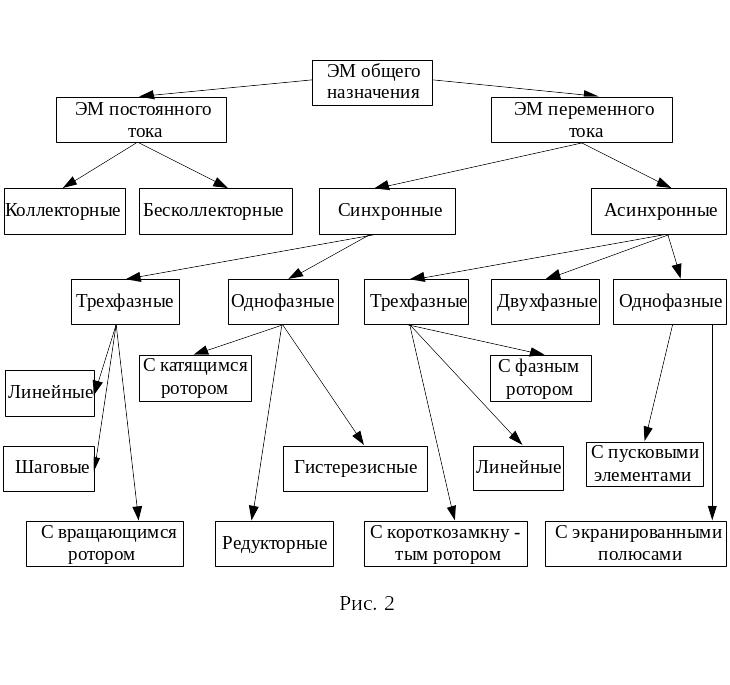
Рис. 2.2
2.2. Основные узлы электрических машин
Промышленность выпускает ЭМ различной мощности и на разные напряжения. Условно по мощности их можно разделить на следующие группы:
– микромашины (мощность P от долей ватта до 500 Вт);
–
машины малой мощности (Р= 0,5![]() 10
кВт);
10
кВт);
– машины средней мощности (Р=10 1000 кВт);
– машины большой мощности (P свыше 1000 кВт).
Напряжение питания ЭМ изменяется от 6 12 В у машин постоянного тока до 30 кВ в машинах радиотехнических устройств.
Номинальная частота вращения электрических машин изменяется в пределах от нескольких оборотов в минуту до 30000 об/мин. Известно, что
![]() ,
(2.1)
,
(2.1)
где M - вращающий момент на валу машины; - угловая скорость вала.
Поэтому увеличение угловой скорости при Р = const позволяет уменьшить вращающий момент М и получить ЭМ с меньшей массой и габаритами.
Электрические машины переменного тока по сравнению с ЭМ постоянного тока являются менее скоростными при частоте питающей сети 50 Гц, так как частота вращения двигателя не может превышать 3000 об/мин.
Конструктивно ЭМ содержат следующие основные узлы:
– неподвижный узел – статор;
– вращающийся узел – ротор (якорь);
– в машинах постоянного тока – щеточно-коллекторный узел, который в генераторах служит для выпрямления переменного напряжения, наводимого в секциях обмотки якоря.
На статоре машины постоянного тока (МПТ) всегда имеются явно выраженные полюса в отличие от машин переменного тока, где полюса выражены неявно. Статор и ротор являются элементами магнитопровода, по которым замыкается магнитный поток.
Конструктивно статор представляет собой металлический корпус цилиндрической формы, на внутренней поверхности которого крепятся магнитные полюса и другие детали. На магнитных полюсах МПТ помещается обмотка возбуждения (ОВ), секции которой располагаются таким образом, чтобы магнитные полюса чередовались (N–S–N–S…N–S).
Якорь набирают в виде пакета цилиндрических по форме листов электротехнической стали, имеющих на внешней поверхности пазы для обмотки. Пакет якоря стягивают изолированными от листов болтами и закрепляют на стальном валу, который вращается, опираясь на шарикоподшипники переднего и заднего щитов машины.
Коллектор представляет собой набор медных, изолированных друг от друга и вала машины пластин, набранных в виде боковой поверхности цилиндра. Коллектор крепится вместе с якорем на валу. По касательной к его боковой поверхности скользят неподвижные щетки (графитовые или медно-графитовые).
ЭМ постоянного тока делятся на две основные группы:
- электрические генераторы - преобразуют механическую энергию в электрическую;
- электрические двигатели - преобразуют электрическую энергию в механическую.
МПТ обладает свойством обратимости, т.е. без изменения конструкции она может работать как в качестве генератора, так и в качестве двигателя.