

8.5.Принцип действия и конструкция электромагнитных реле
Нормальным состоянием реле считают обесточенное состояние его обмотки. На принципиальных электрических схемах положение контактов показывается для обесточенного состояния реле. По этому признаку контакты реле разделяют на замыкающиеся (рис. 8.10.а), размыкающиеся (рис. 8.10.б) и переключающиеся (рис. 8.10.в).
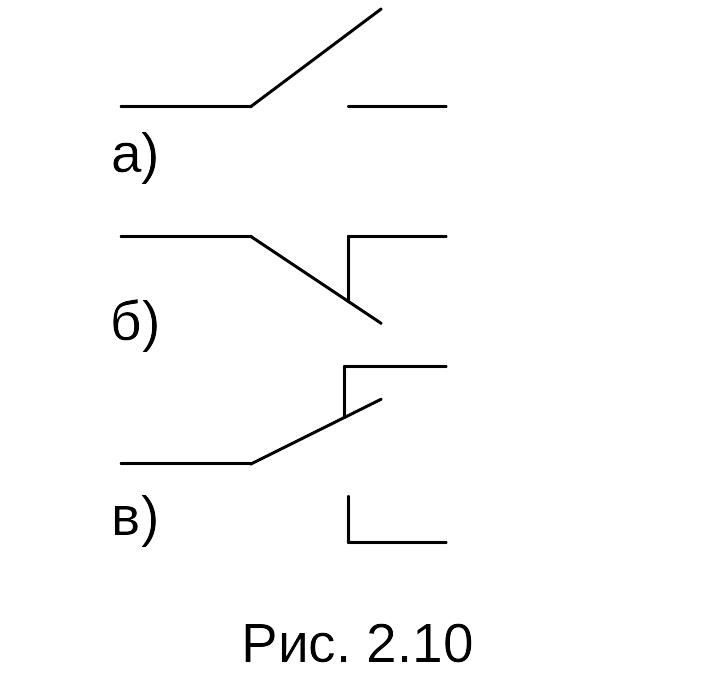
Рис. 8.10
Статическая характеристика вход-выход реле представлена на рис.8.11 при условии, что выходной величиной является ток через замыкающийся контакт.

Рис. 8.11
Ток
отпускания
![]() всегда
меньше тока срабатывания
всегда
меньше тока срабатывания
![]() за
счет остаточной намагниченности
магнитопровода реле после срабатывания.
за
счет остаточной намагниченности
магнитопровода реле после срабатывания.
Коэффициент
запаса
![]() ,
,
Коэффициент
возврата
![]()
Для
того, чтобы
![]() в якоре реле монтируют медную заклепку
(штифт отлипания). Она обеспечивает
конечный зазор
в якоре реле монтируют медную заклепку
(штифт отлипания). Она обеспечивает
конечный зазор
![]() .
Тем самым уменьшается
.
Тем самым уменьшается
![]() и остаточная намагниченность
магнитопровода.
и остаточная намагниченность
магнитопровода.
С точки зрения динамики электромагнитное реле можно характеризовать как динамическое звено с чистым запаздыванием, равным времени срабатывания реле . В этом случае передаточная функция реле имеет вид
![]() ,
где
,
где
![]()
Реле
можно так же рассматривать как
электромеханический усилитель мощности,
у которого
![]() ,
,
![]() -ток
через замкнутые контакты,
-ток
через замкнутые контакты,
![]() -напряжение
между разомкнутыми контактами.
-напряжение
между разомкнутыми контактами.
Время
срабатывания (отпускания) реле состоит
из двух составляющих: времени трогания
и времени движения якоря. Время трогания
![]() –
это время от момента подачи скачком
напряжения питания на обмотку реле до
момента начала движения якоря. Время
срабатывания можно определить по
осциллограмме тока в обмотке реле (рис.
8.8) при включении его на ступеньку
постоянного напряжения.
–
это время от момента подачи скачком
напряжения питания на обмотку реле до
момента начала движения якоря. Время
срабатывания можно определить по
осциллограмме тока в обмотке реле (рис.
8.8) при включении его на ступеньку
постоянного напряжения.
![]() ,
,
![]() ,
,
![]() ,
,
где![]() - коэффициент запаса реле.
- коэффициент запаса реле.
Сопротивление
контактного перехода
![]() ,
где
,
где
![]() -
коэффициент, зависящий от материала
контакта (чаще используется луженая
медь);
-
коэффициент, зависящий от материала
контакта (чаще используется луженая
медь);
![]() ─
коэффициент,
зависящий от формы контактов: точечные
-
─
коэффициент,
зависящий от формы контактов: точечные
-
![]() ,
плоскостные -
,
плоскостные -
![]() ,
объемные -
,
объемные -
![]() ,
,
![]() -
усилие сжатия контактов. Усилие
больше у реле с большим коэффициентом
запаса
-
усилие сжатия контактов. Усилие
больше у реле с большим коэффициентом
запаса
![]() .
Как правило, RK
составляет
0,1─ 0,5Ом, что на порядок меньше, чем у
транзисторного ключа в режиме насыщения.
.
Как правило, RK
составляет
0,1─ 0,5Ом, что на порядок меньше, чем у
транзисторного ключа в режиме насыщения.
8.6.Магнитоуправляемые контакты (герконы)
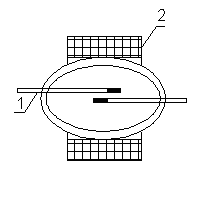
Рис. 8.12
Ресурс
обычного нейтрального электромагнитного
реле составляет порядка
![]() срабатываний. Наиболее ненадежным
элементом реле являются контакты,
которые подвергаются воздействую
окружающей среды. Герметизация контактов
повышает надежность работы реле и его
ресурс. Поэтому в последние 40 лет широкое
применение нашли герметизированные
контакты (герконы), которые представляют
собой 2 пластины из пермаллоя, вплавленные
в стеклянную колбочку рис 8.12. Пространство
внутри колбы заполнено азотом или
инертным газом. Если геркон поместить
в магнитное поле, силовые линии которого
направлены вдоль пластин из пермаллоя,
то они замыкаются.Такое магнитное поле
создается или соленоидальной катушкой,
внутри которой помещается геркон, или
постоянным магнитом.
срабатываний. Наиболее ненадежным
элементом реле являются контакты,
которые подвергаются воздействую
окружающей среды. Герметизация контактов
повышает надежность работы реле и его
ресурс. Поэтому в последние 40 лет широкое
применение нашли герметизированные
контакты (герконы), которые представляют
собой 2 пластины из пермаллоя, вплавленные
в стеклянную колбочку рис 8.12. Пространство
внутри колбы заполнено азотом или
инертным газом. Если геркон поместить
в магнитное поле, силовые линии которого
направлены вдоль пластин из пермаллоя,
то они замыкаются.Такое магнитное поле
создается или соленоидальной катушкой,
внутри которой помещается геркон, или
постоянным магнитом.
Пластины
геркона являются одновременно и
магнитопроводом и контактной парой.
Поскольку в герконах роль якоря играют
легкие пластины, то время срабатывания
герконов существенно меньше, чем обычных
реле и составляет
![]() мс.
Уменьшение контактного сопротивления
геркона
мс.
Уменьшение контактного сопротивления
геркона
![]() достигается покрытием пластин пленкой
из золота, родия, а в более мощных герконах
– за счет смачивания контактов ртутью.
достигается покрытием пластин пленкой
из золота, родия, а в более мощных герконах
– за счет смачивания контактов ртутью.
Герконы, которые часто называют магнитоуправляемыми контактами (МК),совместили в себе ряд преимуществ обычных электромагнитных реле и п/п ключей и поэтому заняли по своим характеристикам промежуточное положение между ними.
Важнейшие достоинства МК:
большой срок службы при высокой надежности (до
 срабатываний);
срабатываний);
высокое быстродействие (0,5 – 2 мс);
малое и стабильное эл. сопротивление контакта в замкнутом осстоянии (0,05 – 0,2 Ом);
небольшая мощность управления ─ 50…150 мВт;
высокое эл. сопротивление изоляции
 Ом
и более;
Ом
и более;
хорошая механическая устойчивость (выдерживают удары – до 15g, вибрации – 15…25g);
большой диапазон рабочих температур: -60 С … +150 С;
малая стоимость;
стойкость контакта к кратковременным электрическим перенапряжениям (5…6
 )
в замкнутом состоянии.
)
в замкнутом состоянии.
К недостаткам МК относят:
1. малые коммутационные токи;
2. малое число контактных групп (одна в одном баллоне);
3. наличие дребезга контактов при замыкании (у контактов, не смачиваемых ртутью);
4. большой уровень наводимых помех от дребезга контактов;
5. малое значение пробивного напряжения между контактами (до 600В у обычных герконов);
6. подверженность воздействиям внешних магнитных полей;
7. зависимость параметров отпускания от коммутируемого тока;
8. хрупкость стеклянной оболочки.
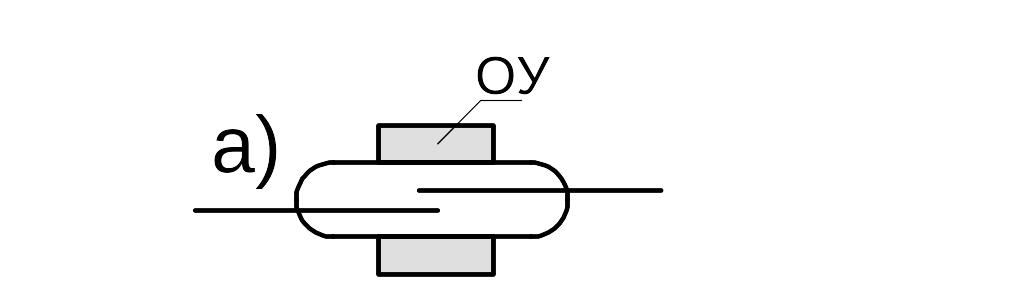
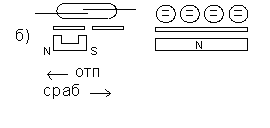
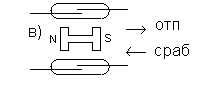
Рис. 8.13
Конструкции магнитоуправляемых контактов показаны на рис 8.13:
а) соленоидальное одноконтактное исполнение;
б), в) многоконтактный МК, управляемый постоянным магнитом.
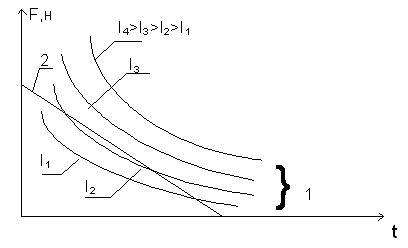
Рис.8.14
На рис.8.14 показано семейство тяговых характеристик 1 герконового реле и механиническая характеристика 2 противодействующего (возвратного) усилия упругих сил пластин контактной пары. Срабатывание герконового реле происходит при токе I2 < I < I3 ,которому соответствует тяговая характеристика, касательная к механической характеристике 2.