

6.3 Выбор двигателя для кратковременного и повторно–кратковременного режимов работы
Промышленность серийно не выпускает двигатели для кратковременного режима работы. Как правило, в этом случае используются двигатели для продолжительного режима, которые на интервале tВКЛ могут быть перегружены. Если в течение времени tВКЛ (рис. 45) двигатель должен развивать в нагрузке вращающий момент М, то эквивалентный по теплу момент двигателя продолжительного режима МЭКВ= ММ/(РТ iр), где РТ – коэффициент термической перегрузки, определяемый выражением [2]:
![]() .
(6.5)
.
(6.5)
С
другой стороны, эквивалентный момент,
по которому выбирают двигатель, следует
оценить по перегрузочной способности
двигателя МЭКВ=ММ/(λМ
iр).
Кроме того
![]() .
.
Из этих двух значений МЭКВ принимают большее и по нему выбирают двигатель, удовлетворяющий условию МНОМ >МЭКВ. АД следует также проверить по его пусковому моменту, т.е. выполнению условия МП>ММ/(iр).
Двигатель, работающий в повторно-кратковременном режиме, выбирают по каталогу ПКВ–режима по вращающему моменту М, который он должен развивать за время tВКЛ (рис.6.2) и по продолжительности включения ПВ согласно формуле (6.1). Если вычисленное фактическое значение ПВФ отличается от стандартного ПВСТ, то
![]() (6.6)
(6.6)
Двигатель выбирают из условия МНОМ >МЭКВ.
Если двигатель ПКВ–режима выбирают по каталогу двигателей, рассчитанных на продолжительный режим работы, то эквивалентный момент находят из соотношения МЭКВ=М/РТ с помощью коэффициента термической перегрузки:
 (6.7)
(6.7)
Как и в кратковременном режиме, двигатель проверяют на перегрузку по моменту нагрузки и пусковому моменту.
7.Электромагнитные устройства систем управления
7.1.Принцип действия, конструкции и области применения магнитомодуляционных устройств
К магнитомодуляционным устройствам относятся:
Магнитные модуляторы постоянного и медленно меняющегося напряжения и тока;
Феррозонды;
Бесконтактные магнитные реле, магнитные усилители непрерывных и импульсных сигналов;
Генераторы инфранизкочастотных колебаний.
В основе работы всех этих устройств лежит принцип действия магнитного усилителя.
Магнитные
усилители ( МУ ), как правило, содержат
2 раздельных магнитопровода ( в отличии
от трансформаторов, которые имеют 1
магнитопровод). На каждом из
магнитопроводов-сердечников расположена
обмотка переменного тока, называемая
рабочей
![]() (рис.1.). Кроме того имеется одна, а чаще
несколько ( до 6-7) обмоток управления
(рис.1.). Кроме того имеется одна, а чаще
несколько ( до 6-7) обмоток управления
![]() ,
охватывающих оба сердечника сразу.
Такие обмотки, как правило, подключаются
к цепи постоянного или низкочастотного
тока. Частота тока в обмотке управления
должна быть намного меньше частоты тока
в
,
т.е.
,
охватывающих оба сердечника сразу.
Такие обмотки, как правило, подключаются
к цепи постоянного или низкочастотного
тока. Частота тока в обмотке управления
должна быть намного меньше частоты тока
в
,
т.е.
![]() .
В промышленной автоматике
.
В промышленной автоматике
![]() ,
а как правило составляет 0 – 2 Гц, частота
,
а как правило составляет 0 – 2 Гц, частота
![]() - 50 Гц или 400 Гц.
- 50 Гц или 400 Гц.
|
Рис. 7.1 Схема включения МУ с последовательным включением рабочих обмоток и нагрузки
|
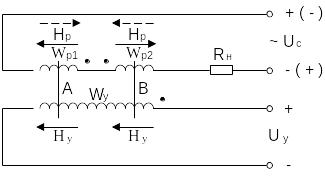
Для
исключения трансформации переменного
тока из выходной цепи
во входную цепь
![]() рабочие обмотки сердечников
и
включаются встречно и создают в указанных
сердечниках противоположно направленные
потоки (рис. 7.2.). Правда, результирующее
потокосцепление обмотки
рабочие обмотки сердечников
и
включаются встречно и создают в указанных
сердечниках противоположно направленные
потоки (рис. 7.2.). Правда, результирующее
потокосцепление обмотки
![]() равно нулю только при равенстве нулю
напряженности магнитного поля
равно нулю только при равенстве нулю
напряженности магнитного поля
![]() ,
что имеет место при отсутствии сигнала
управления.
,
что имеет место при отсутствии сигнала
управления.
Сердечники МУ выполняются для промышленных частот из высококачественной электротехнической стали, а для повышенных частот – из пермоллоя, аморфных магнитных материалов, например Гаммамет, или феррита.
МУ как и другие магнитомодуляционные устройства можно рассматривать или как управляемый дроссель насыщения или как магнитный семистор.
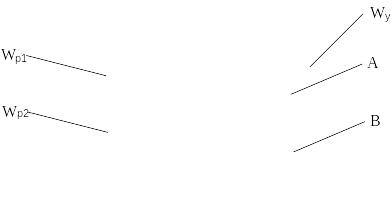
|
Рис. 7.2. Упрощённый эскиз конструкции магнитного усилителя
|
Под дросселем насыщения понимают изменяемую линейную индуктивность, управляемую подмагничиванием сердечника постоянным (выпрямленным) током.
Первый подход не раскрывает физики работы схемы, но даёт неплохие количественные результаты и методически проще описывается. Второй подход раскрывает физику работы схемы МУ, даёт хорошие количественные результаты.
Для
рассмотрения первого подхода запишем
выражение для тока
![]() в рабочих обмотках МУ по закону Ома
в рабочих обмотках МУ по закону Ома
![]() ,
,
где
![]() - сопротивление нагрузки;
- сопротивление нагрузки;
![]() -
активное сопротивление одной обмотки
;
-
активное сопротивление одной обмотки
;
![]() -
индуктивность обмотки
;
-
индуктивность обмотки
;
![]() -
угловая частота переменного тока.
-
угловая частота переменного тока.
Известно,
что
![]() ,
,
где - число витков рабочей обмотки;
![]() -
магнитная проводимость сердечника;
-
магнитная проводимость сердечника;
![]() -
относительное значение дифференциальной
магнитной проницательности, определяемой
по основной кривой намагничивания (ОКН)
магнитного материала сердечника;
-
относительное значение дифференциальной
магнитной проницательности, определяемой
по основной кривой намагничивания (ОКН)
магнитного материала сердечника;
![]() -
магнитная проницаемость вакуума;
-
магнитная проницаемость вакуума;
![]() -
сечение сердечника;
-
сечение сердечника;
![]() -
среднее значение длины магнитной силовой
линии в сердечнике.
-
среднее значение длины магнитной силовой
линии в сердечнике.
Так
как значение
![]() ,
,
![]() ,
,
,
,
![]() остаются неизменными, то управлять
величиной тока
остаются неизменными, то управлять
величиной тока
![]() можно изменением
,
что, в свою очередь, возможно при изменении
можно изменением
,
что, в свою очередь, возможно при изменении
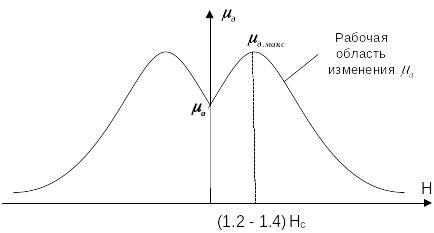
![]() ,
зависимость которой от напряженности
подмагничивающего поля показана на
рис. 7.3.
,
зависимость которой от напряженности
подмагничивающего поля показана на
рис. 7.3.
Величина напряженности подмагничивающего поля определяется по закону полного тока
![]() ,
,
где - число витков обмотки управления.
Так
как начальная рабочая точка, соответствующая
![]() (точка холостого хода МУ), выбирается
на «верхнем колене» ОКН сердечника, то
напряженность
(точка холостого хода МУ), выбирается
на «верхнем колене» ОКН сердечника, то
напряженность
![]() равна примерно 1,2-1,4 коэрцитивной силы
равна примерно 1,2-1,4 коэрцитивной силы
![]() ,
т.е.
,
т.е.
![]() ,
что соответствует максимуму дифференциальной
магнитной проницаемости
,
что соответствует максимуму дифференциальной
магнитной проницаемости
![]() .
При увеличении модуля
происходит уменьшение
и, следовательно, индуктивности рабочих
обмоток МУ.
.
При увеличении модуля
происходит уменьшение
и, следовательно, индуктивности рабочих
обмоток МУ.
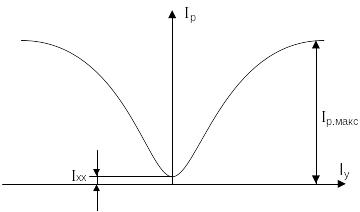
Таким
образом, изменяя ток подмагничивания
![]() ,
можно управлять величиной индуктивности
рабочей обмотки и током через обмотки
и нагрузку. Зависимость выходного тока
нереверсивного МУ (рис.1) от входного
тока
показана
на рис. 7.4.
,
можно управлять величиной индуктивности
рабочей обмотки и током через обмотки
и нагрузку. Зависимость выходного тока
нереверсивного МУ (рис.1) от входного
тока
показана
на рис. 7.4.
|
Рис. 7.3. Зависимость дифференциальной магнитной проницаемости для основной кривой намагничивания сердечника |
Ток
холостого хода
![]() оказывается тем меньше, чем большей
прямоугольностью обладает петля
гистерезиса материала сердечника и чем
меньше величина коэрцитивной силы
материала сердечника.
оказывается тем меньше, чем большей
прямоугольностью обладает петля
гистерезиса материала сердечника и чем
меньше величина коэрцитивной силы
материала сердечника.
При
насыщении сердечников МУ максимальное
значение выходного тока
![]() определяется выражением
определяется выражением
![]() .
.
|
Рис. 7.4. Характеристика «вход-выход» магнитного усилителя |
Коэффициент
усиления по току
![]() определяется на линейном участке
характеристики «вход-выход» МУ из
выражения
определяется на линейном участке
характеристики «вход-выход» МУ из
выражения
![]() .
.
Коэффициент
усиления по мощности
![]() при активном характере нагрузки
соответственно равен
при активном характере нагрузки
соответственно равен
![]() .
.
Рабочие
обмотки
можно включать не только последовательно,
но параллельно. Однако параллельное
включение
на практике в автоматике не используется,
т.к. по отношению к входному сигналу
![]() параллельно включенные обмотки
образуют
короткозамкнутый контур, существенно
увеличивающий индуктивность и постоянную
времени рабочих обмоток, что отрицательно
сказывается на быстродействии МУ.
параллельно включенные обмотки
образуют
короткозамкнутый контур, существенно
увеличивающий индуктивность и постоянную
времени рабочих обмоток, что отрицательно
сказывается на быстродействии МУ.
Охарактеризуем
подход к МУ как к магнитному семистору.
В каждый полупериод переменного тока
в цепи рабочих обмоток напряженности
магнитного поля
![]() и
и
![]() складываются в одном сердечнике МУ (на
рис. 7.1 в сердечнике А)
и вычитаются в другом сердечнике. В
следующий полупериод переменного тока
картина меняется на противоположную.
Таким образом, в оба полупериода оба
сердечника вместе имеют одинаковое
сопротивление, включенное последовательно
с нагрузкой
.
Поэтому кривая тока
складываются в одном сердечнике МУ (на
рис. 7.1 в сердечнике А)
и вычитаются в другом сердечнике. В
следующий полупериод переменного тока
картина меняется на противоположную.
Таким образом, в оба полупериода оба
сердечника вместе имеют одинаковое
сопротивление, включенное последовательно
с нагрузкой
.
Поэтому кривая тока
![]() в цепи рабочих обмоток
будет симметрична относительно оси
времени, т.е. кривая тока
(и напряженности
)
не будет содержать четных гармоник.
Тогда, в силу нелинейности кривой
намагничивания сердечников МУ, четные
гармоники появятся в кривых магнитной
индукции в сердечниках и будут
трансформироваться в обмотку
,
т.к. не могут быть скомпенсированы
встречным включением
.
Зависимость амплитуды второй гармоники,
в цепи рабочих обмоток
будет симметрична относительно оси
времени, т.е. кривая тока
(и напряженности
)
не будет содержать четных гармоник.
Тогда, в силу нелинейности кривой
намагничивания сердечников МУ, четные
гармоники появятся в кривых магнитной
индукции в сердечниках и будут
трансформироваться в обмотку
,
т.к. не могут быть скомпенсированы
встречным включением
.
Зависимость амплитуды второй гармоники,
![]() которая появляется в
,
от тока
которая появляется в
,
от тока
![]() показана на рис. 7.5.
показана на рис. 7.5.
|
Рис.
7.5. Зависимость амплитуды второй
гармоники
|
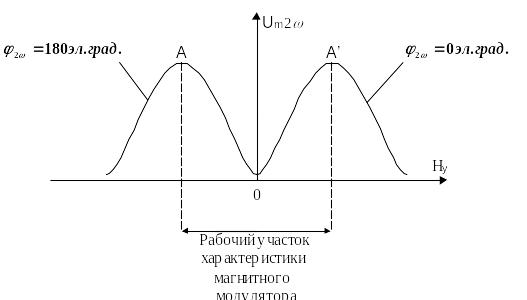
При изменении полярности тока фаза четных гармоник изменяется на 180 эл. градусов, что позволяет с помощью фазочувствительного усилителя получить на выходе последнего сигнал положительной или отрицательной полярности.
Физический эффект появления чётных гармоник в сигнальной обмотке называют магнитомодуляционным и используют для измерения малых и сверхмалых постоянных токов и магнитных полей с помощью датчиков, получивших название феррозонды.
Если
материал сердечников МУ имеет петлю
гистерезиса, близкую к идеально
прямоугольной, а индуктивность в цепи
обмоток
близка к нулю (режим свободного
подмагничивания), то МУ работает как
магнитный семистор, фаза включения
(насыщения сердечника) которого однозначно
определяется величиной тока в обмотке
управления
![]() .
На рис. 7.6 представлены осциллограммы
токов
.
На рис. 7.6 представлены осциллограммы
токов
![]() и
и
![]() в одном из возможных установившихся
режимов работы МУ на линейном
участке характеристики «вход-выход».
в одном из возможных установившихся
режимов работы МУ на линейном
участке характеристики «вход-выход».
-
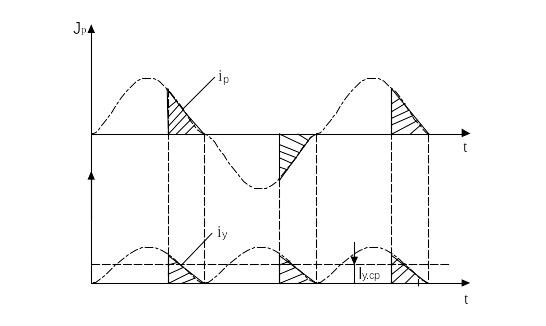
Рис. 7.6. Кривые токов и
 в идеальном магнитном усилителе в
режиме свободного подмагничивания
в идеальном магнитном усилителе в
режиме свободного подмагничивания
Конструкция
магнитных усилителей существенно
зависит от выходной мощности МУ, которая
может меняться в диапазоне
![]() .
При мощностях до 100Вт сердечники МУ
изготавливаются кольцевыми из штампованных
колец изотропного магнитного материала
или из текстурированной холоднокатаной
ленты электротехнической стали или из
пермоллоя. Лента пермоллоя наматывается
на каркас из фарфора или из немагнитной
нержавеющей стали. При мощностях свыше
100Вт сердечники изготавливают О,
Ш, П – образными
из электротехнической стали с каркасными
обмотками.
.
При мощностях до 100Вт сердечники МУ
изготавливаются кольцевыми из штампованных
колец изотропного магнитного материала
или из текстурированной холоднокатаной
ленты электротехнической стали или из
пермоллоя. Лента пермоллоя наматывается
на каркас из фарфора или из немагнитной
нержавеющей стали. При мощностях свыше
100Вт сердечники изготавливают О,
Ш, П – образными
из электротехнической стали с каркасными
обмотками.
Области применения МУ:
Системы управления электроприводом, двигателями постоянного и переменного тока;
Стабилизаторы переменного тока и напряжения;
Мощные и сверхмощные генераторы инфранизкочастотных колебаний ( 0,1 - 2 Гц );
Датчики слабых токов и магнитных полей (феррозонды);
Сверхмощные преобразователи-усилители, используемые в плазменной и лазерной технологиях.