

5.4. Двигатели для микроперемещений
В приводах подачи прецизионных шлифовальных станков, приборов точной механики и оптики требуется отработка перемещений, составляющих несколько микрометров, а иногда и десятые доли микрометра. При использовании для этой цели шаговых двигателей, обладающих даже малым угловым шагом, в 1-2 градусах необходима механическая передача с большим передаточным отношением, а так в перечисленных установках очень высоки точностные требования, то применение шаговых двигателей практически исключается. Частичным решением задачи может быть использование шаговых двигателей с электрическим дроблением шага, когда посредством специальной электронной схемы при подаче очередного импульса обеспечивается перемещение не на полный шаг, а только на часть его. Уже достигнуты результаты по дроблению шага на несколько десятков долей. Однако и здесь не обойтись без механической передачи, но, как уже отмечено, это неизбежно приводит к существующему увеличению погрешности.
В связи с этим необходимы двигатели для микроперемещений, выполненные на иной физической основе. Принципиально возможно построение двигателей, в которых используются следующие физические явления: тепловое расширение тела; электромагнитное взаимодействие; магнитострикция; обратный пьезоэффект.
Двигатели для микроперемещений, построенные на тепловом расширении тела, не используют из-за большой их инерционности и отрицательного влияния температурных полей на окружающие приборы и узлы.
Двигатели, выполненные как втяжные или поворотные магниты, иногда находят применение. Однако очень трудно сконструировать магнит, у которого тяговое усилие слабо зависит от перемещения. Кроме того, такой двигатель весьма инерционен из-за большой индуктивности тяговой катушки. Полоса пропускания управляющего сигнала 10-20 Гц. Положительное качество двигателя - обеспечение достаточно больших перемещений, определяемых ходом электромагнита (ход может составлять несколько миллиметров). В большинстве случаев в прецизионных установках наряду с микропремещениями необходимы и относительно большие юстировочные перемещения.
Более широкое применение нашли магнитострикционные двигатели, в которых используется свойство стержня из ферромагнитнго материала изменять длину под воздействием магнитного поля. Зависимость длины стержня от напряженности магнитного поля – нелинейная функция, которая обычно имеет максимум при Н=(1÷5)*104А/м. Максимальное относительное изменение линейных размеров стержней из таких материалов как никель, кобальт, премендюр и другие, может составлять (20÷50)*10-6. Следовательно, при длине 100мм свободный конец стержня может перемещаться на 2-5 мкм. Пороговая чувствительность составляет 0,05-0,10мкм.
Недостаток магнитострикционного двигателя, так же как и электромагнитного, - инерционность, обусловленная процессами в намагничивающей катушке. Однако индуктивность ее несколько меньше, так как зазор в магнитной цепи может отсутствовать. Все же полоса пропускания и в этом случае не превышает 30 Гц. Существенное влияние на точность работы двигателя оказывает внешнее тепловое поле и нагрев стержня. Следует иметь в виду, что намагничивающая катушка двигателя сама создает ощутимое тепловое поле, так как габариты катушки и потребление энергии достаточно велики.
Наиболее предпочтителен пьезоэлектрический двигатель, выполняемый обычно как столбик из пьезокерамических шайб, склеенных между собой. Исходным материалом для пьезокерамики служат оксиды металлов, как –то титан бария, цикронат-титан свинца и др. Когда к торцевым поверхностям шайб приложено напряжение, то в зависимости от ориентации электрического поля они носят линейный характер. Максимальное относительное удлинение может составлять (5÷7)*10-4. Следовательно, пьезостолбик длиной 50 мм может обеспечить перемещение до 25мкм, т.е. примерно на порядок больше, чем у магнитострикционных двигателях. Напряжение, подаваемое на шайбу, обычно составляет до 300 В.потребление энергии незначительно.
Существенное достоинство пьезоэлектрического двигателя – быстродействие. Полоса пропускания достигает 1000 Гц. К недостаткам как магнитострикционного, так и пьезоэлектрического двигателя относится наличие петли гистерезиса в их характеристиках. Ширина петли может достигать 20-30% максимального перемещения. В пьезоэлектрических двигателях влияние гистерезиса может быть несколько ослаблено предварительным сжатием столбика шайб. Сузить петлю гистерезиса в несколько раз можно также включением конденсаторов в цепь двигателя.
В последнее время появились двигатели, в которых применены новые керамические материалы (на основе магнониобата свинца). Принцип работы этих двигателей основан на эффекте электрострикции. Характеристики их практически не обладают гистерезисом. Однако зависимость удлинения столбика шайб от напряжения носит квадратичный характер (рис.5.10). Поэтому для создания реверсивного двигателя должно использоваться некоторое смещающее напряжение Uсм, на которое накладывается управляющее. При этом работа протекает на участке, приближающемся к линейному.
Усилия,
которые могут создавать магнитострикционный
и пьезоэлектрический двигатели,
естественно, зависят
от размеров
стержня и шайб и в реальных двигателях
составляют несколько сотен ньютонов.
Анализ динамики двигателей показывает, что они представляют собой колебательные звенья и могут описываться передаточными функциями второго-четвертого порядка.
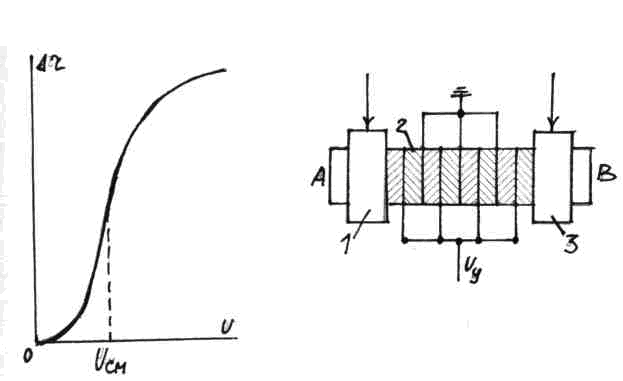
Рис.5.10
Часто максимальные перемещения, которые могут обеспечить магнитострикционный и пьезоэлектрический двигатели, недостаточны. Тогда приходится прибегать к шаговым двигателям, построенным на тех же принципах.
Работа шагового пьезоэлектрического двигателя поясняется рис.5.10. Двигатель состоит из столбика пьезоэлектрических шайб 2 и двух зажимных устройств 1 и 3 на его концах. При нормальной работе в непрерывном режиме зажимное устройство 3 зафиксировано, а устройство 1 свободно. В зависимости от напряжения, поданного на шайбы, осуществляются микропреремещения конца А. При использовании возможного ресурса перемещений и соответственно при достижении напряжением предельного значения зажим 1 фиксирует конец А, напряжение с шайб снимается, а зажим 3 освобождает конец В при этом столбик шайб сжимается до исходной длины (конец В подтягивается). После этого зажим 3 вновь фиксируется, а зажим 1 отпускает конец А. Далее вновь подается напряжение на шайбы и двигатель начинает работать. Перемещая конец А, соответственно управляя объектом, механически связанным с двигателем. Если одного шага перемещения оказывается недостаточно, то цикл повторяется. Зажимные устройства управляются специальным коммутатором.
Для фиксации концов столбика шайб могут устанавливаться механические устройства (например, цанговые зажимы) с управлением от магнитов или тех же пьезокерамических элементов – шайб. Весьма удачным решением, использованным в двигателе, который был разработан в Ленинградском политехническом институте имени М.И. Калинина, является применение электрореологических фиксаторов. На электроды, между которыми находится электрореологическая суспензия (на основе трансформаторного масла с включением частиц диатомита),подается постоянное напряжение. Вязкость суспензии резко увеличивается, и при этом положение электродов достаточно жестко фиксируется. Одним из электродов фиксатора в двигателе является металлический стержень на концах столбика шайб. Необходимое напряжение источника питания зависит от промежутка между электродами, который без труда может быть сделан менее 100мкм. Реальное напряжение может быть 200-500 в. Удельное усилие, создаваемое при этом за счет электрореологического эффекта, составляет 10-20 Н/см2.
Управление шаговым пьезоэлектрическим двигателем может осуществляться как за счет измерения шага, так и за счет частоты отработки шагов. Реально достижимая частота 30-50 Гц.
Шаговый магнитострикционный двигатель функционирует по тому же принципу.