

4.4. Синхронные редукторные двигатели
В синхронных редукторных микродвигателях (СРД) осуществляется электромагнитное редуцирование (уменьшение) угловой скорости ротора по отношению к угловой скорости первой гармоники поля статора.
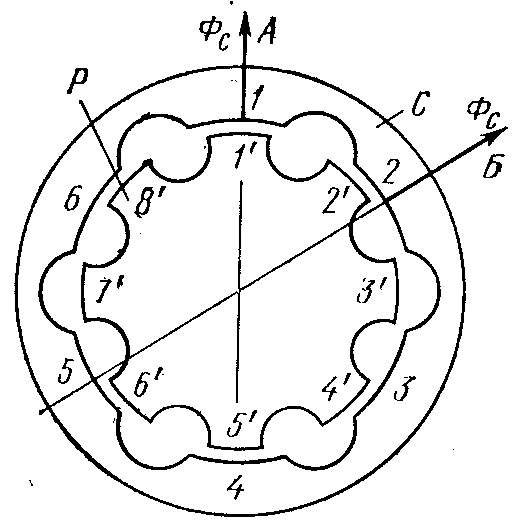
Рис.4.6
Магнитопроводы статора и ротора СРД набирают из листов электротехнической стали (рис. 4.6). Статор С выполнен в виде кольца, имеет зубцы и полукруглые пазы на внутренней поверхности. Ротор Р выполнен в виде диска, имеет зубцы и пазы на внешней поверхности. Число зубов статора ZC всегда меньше числа зубцов ротора ZР. На статоре уложена обмотка, предназначенная для питания от трехфазной или однофазной сети и создающая вращающееся магнитное поле ФС.
Если в данный момент времени поток ФС направлен по оси А, то реактивный вращающий момент заставит ротор повернуться в положение наибольшей магнитной проводимости, т.е. напротив статорных зубцов 1 и 4 будут находиться роторные зубцы 1΄ и 5΄. При перемещении потока ФС в положение оси Б, т.е. на угол 360/ZС, ротор под действием реактивного момента повернется на такой угол, что магнитная проводимость снова станет наибольшей. Это произойдет тогда, когда напротив зубцов статора 2 и 5 встанут зубцы ротора 2΄ и 6΄, т.е. ротор повернется на угол 360/ZС–360/ZР. Следовательно, отношение угловой скорости поля статора 1 к угловой скорости ротора 2 равно
![]() , (4.2)
, (4.2)
где k – коэффициент редуцирования угловой скорости.
Синхронная угловая скорость первой гармоники поля статора равна
![]()
где рС – число пар полюсов обмотки статора, равное 1 или 2. Для рассмотренного случая (рис. 35) kР=4. Если ZP=100 и ZC=98, то kР=50.
В СРД отношение чисел зубцов рекомендуется выбирать из условия
ZP–ZC=2pC, т.е. kP=ZP/2pC. Однако увеличение kP с ростом ZP ограничено минимальной по технологическим соображениям толщиной зубца.
Главное достоинство СРД – постоянство частоты вращения, что позволяет применять его для привода электрических часов, приборов звукозаписи и звуковоспроизведения. К недостаткам таких двигателей можно отнести малый вращающий момент, низкий КПД и относительно большие габариты.
4.5. Синхронные шаговые микродвигатели
Шаговые двигатели (ШД) преобразуют управляющий сигнал в виде двоичного кода в пропорциональное ему число импульсов управления и фиксированный угол поворота вала или линейное перемещение механизма без датчика обратной связи (ОС). Структурная схема разомкнутой системы управления ШД представлена на рис. 4.7.
 Точность
отработки угла или линейного перемещения
в разомкнутой системе управления
достаточно высока, в связи с фиксацией
положения ротора ШД при отсутствии
импульсов управления. Очевиден и
недостаток привода с ШД: при сбое импульса
дальнейшие перемещения происходят с
ошибкой в угле, пропорциональной числу
пропущенных импульсов. Поэтому в
ответственных случаях применяют ШД с
ОС, имеющие датчик положения ротора.
Точность
отработки угла или линейного перемещения
в разомкнутой системе управления
достаточно высока, в связи с фиксацией
положения ротора ШД при отсутствии
импульсов управления. Очевиден и
недостаток привода с ШД: при сбое импульса
дальнейшие перемещения происходят с
ошибкой в угле, пропорциональной числу
пропущенных импульсов. Поэтому в
ответственных случаях применяют ШД с
ОС, имеющие датчик положения ротора.
Одним из определяющих параметров ШД является шаг ротора, т.е. угол поворота ротора, соответствующий одному импульсу управления. Шаг двигателя с активным ротором, выполненным в виде многополюсного постоянного магнита, определяется соотношением [2]:
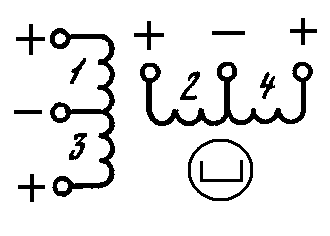
Рис.4.8
![]() ,
(4.3)
,
(4.3)
где p – число пар полюсов ротора или каждой фазы статора; m – число тактов в одном цикле управления ШД.
Для
создания реверсивных ШД используются
трехфазные или двухфазные двухполупериодные
двигатели, создающие дискретное ВМП.
Обмотки
статора двухфазных ШД выполняют с
выводами от средних точек (рис.4.8). Таким
образом, каждая фаза оказывается
расщепленной на две полуфазы, и обмотка
двигателя, по существу, становиться
четырехфазной. Посылая в такую обмотку
однополярные импульсы, сдвинутые во
времени, заставляют «северный» полюс
N активного ротора «следить» за «южным»
полюсом статора, перемещающимся при
р=1 с шагом
![]() .
.
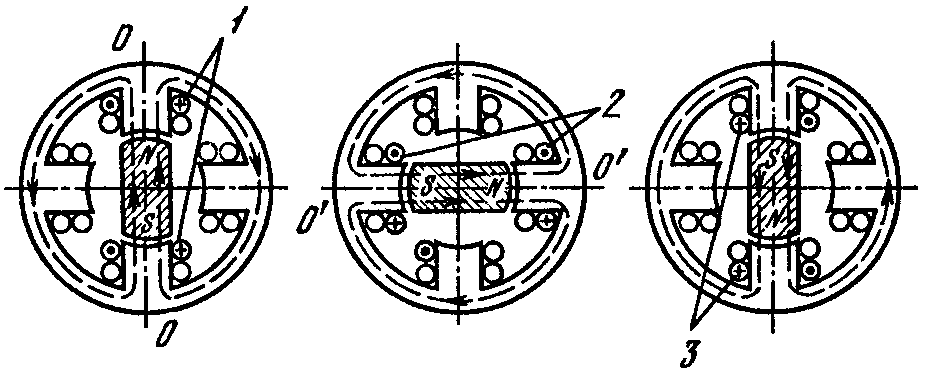
а) б) в)
Рис.4.9
На рис. 4.9 показаны три последовательных момента протекания тока управления в фазах 1-3, перемещения МДС полюсов статора и положения ротора, соответствующие импульсам тока, показанным на рис. 4.9, а (раздельная коммутация обмоток).
Шаг
в электрических градусах для активного
ротора ЭЛ=p.
Поэтому каждому переключению этих
импульсов соответствует сдвиг на
![]() кривой
статического
синхронизирующего момента
МСИНХ
(рис. 4.11).
кривой
статического
синхронизирующего момента
МСИНХ
(рис. 4.11).
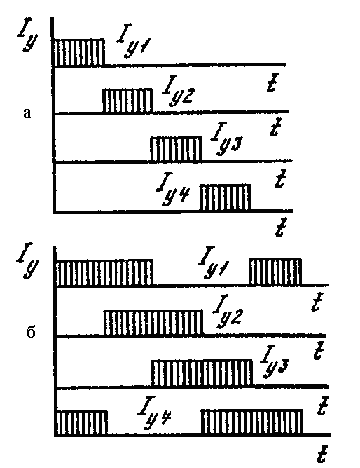
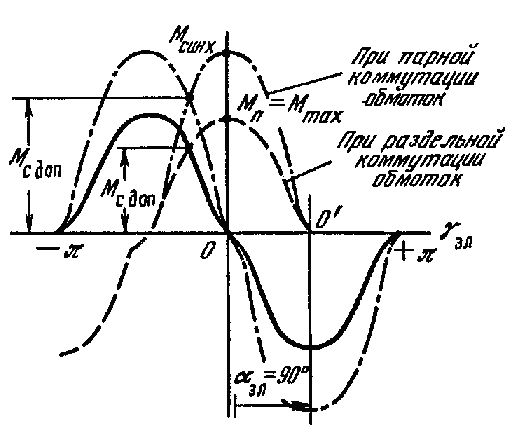
Рис.4.10 Рис.4.11
Кривая МСИНХ = f(ЭЛ) – это зависимость синхронизирующего вращающего момента МСИНХ, стремящегося совместить ось полюса ротора с осью возбужденного полюса статора при установившемся токе в обмотке, от угла ЭЛ между указанными осями. Значение ЭЛ, равное нулю, соответствует положению ротора ШД на рис.4.10,а. Сплошная кривая МСИНХ на рис.4.11 соответствует возбужденной первой фазе ШД, а штрихованная кривая – возбужденной второй фазе. Точка пересечения кривых смежных синхронизирующих моментов определяет допустимый момент сопротивления нагрузки МС ДОП. При парной коммутации обмоток фаз (рис.4.10,б) амплитуда МСИНХ возрастает (рис.4.11), что приводит к росту МС ДОП. Для реверса ШД порядок коммутации обмоток статора необходимо изменить на обратный (4-3-2-1 и т.д.).
Основные характеристики ШД – это семейство зависимостей частоты приемистости fПР от момента сопротивления МС и момента инерции JС нагрузки на валу ШД (рис.4.12). Частотой приемистости называют максимальную частоту управляющих импульсов, при которой возможен пуск ротора без выпадения из синхронизма (потери шагов). Частота fПР растет с увеличением МСИНХ, уменьшением шага ротора, снижением постоянной времени обмоток фаз, момента нагрузки и момента инерции нагрузки на валу ШД. Для устойчивой работы ШД необходимо, чтобы (МС/МMAX)0,30,5 и (JC/JДВ) 12.
