

3.3. Принцип действия асинхронного двигателя
При пуске двигателя частота вращения ротора . При подключении фазных обмоток статора к трехфазной сети последние создают ВМП, которое наводит в неподвижном роторе трансформаторную ЭДС
![]() ,
(3.5)
,
(3.5)
где
![]() – коэффициент обмотки ротора, зависящий
от коэффициента укладки провода и его
диаметра,
=0,30,6;
W2
– число витков фазной обмотки ротора;
– коэффициент обмотки ротора, зависящий
от коэффициента укладки провода и его
диаметра,
=0,30,6;
W2
– число витков фазной обмотки ротора;
![]() -
амплитуда потока ВМП. Индекс “н” –
указывает на неподвижный ротор.
-
амплитуда потока ВМП. Индекс “н” –
указывает на неподвижный ротор.
Токи,
протекающие в секциях обмотки ротора
под действием трансформаторной ЭДС,
взаимодействуют с ВМП и создают
электромагнитный момент М, направленный
в сторону вращения ВМП. Важнейшим
параметром АД является скольжение
S,
под которым понимают отношение
S=(n1-n2)/n1.
Оно показывает относительную разность
частот вращения ВМП и ротора. При пуске
S=1. По мере разгона ротора скольжение
уменьшается до номинального
![]() =
0,020,06.
=
0,020,06.
При
![]() имеем нормальный двигательный
режим,
в случае
имеем нормальный двигательный
режим,
в случае
![]() – генераторный
режим,
когда АД входит в режим
рекуперативного торможения.
Значения
– генераторный
режим,
когда АД входит в режим
рекуперативного торможения.
Значения
![]() соответствуют режиму электромагнитного
тормоза противовключением,
наступающим в случае, когда скорости
вращения ротора и ВМП статора имеют
противоположные направления.
соответствуют режиму электромагнитного
тормоза противовключением,
наступающим в случае, когда скорости
вращения ротора и ВМП статора имеют
противоположные направления.
При вращении ротора в нем наводится трансформаторная ЭДС:
![]() ,
(3.6)
,
(3.6)
где
![]() – частота, с которой ВМП статора
пересекает обмотку ротора.
– частота, с которой ВМП статора
пересекает обмотку ротора.
Известно,
что
![]() .
По аналогии разность частот вращения
ВМП статора и частоты вращения ротора
будет
.
По аналогии разность частот вращения
ВМП статора и частоты вращения ротора
будет
![]() .
Тогда
.
Тогда
![]() (3.7)
(3.7)
Нижним индексом “1” здесь и далее будем обозначать параметры, относящиеся к статору, а индексом “2” – параметры, относящиеся к ротору.
Подставив
выражение (3.6) в (3.7) с учетом (3.5), получим
![]() .
Величина действующего значения тока в
одной из фаз обмотки ротора под действием
.
Величина действующего значения тока в
одной из фаз обмотки ротора под действием
![]() определяется по закону Ома:
определяется по закону Ома:
 ,
(3.8)
,
(3.8)
где r2, x2 – активное и индуктивное сопротивления фазы ротора,
![]() .
(3.9)
.
(3.9)
Подставим выражение (37) в (36), получим
 .
(3.10)
.
(3.10)
Т-образная схема замещения одной фазы АД, рассматриваемого как трансформатор с вращающейся вторичной обмоткой, представлена на рис. 3.6. Ввиду малости значений активного r1 и индуктивного сопротивления рассеяния x1 обмотки статора фазное напряжение U1 практически уравновешивается ЭДС самоиндукции E1. Активное сопротивление rm ветви намагничивания всегда намного превышает величину r1 и соответственно индуктивное сопротивление ветви намагничивания xm>>x1, поэтому
![]() .
(3.11)
.
(3.11)
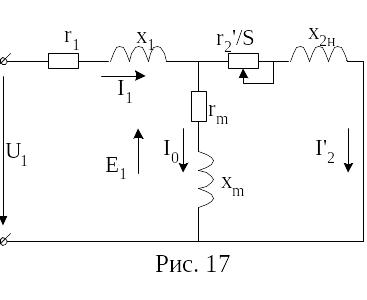
Рис. 3.6
Штрихом обозначены параметры фазной обмотки ротора, приведенные к соответствующей обмотке статора:
 ,
,
![]() ,
(3.12)
,
(3.12)
где
![]() - коэффициент трансформации системы
“статор–ротор”.
- коэффициент трансформации системы
“статор–ротор”.
Исходя из этих соображений, из схемы замещения получим
 .
(3.13)
.
(3.13)
Из
анализа выражения (3.13) следует, что
наибольший ток в двигательном режиме
приходится на пуск, когда S=1,
![]() и
и
![]() .
По мере разгона двигателя его ток
снижается до номинального
.
По мере разгона двигателя его ток
снижается до номинального
![]() ,
т.к. при
,
т.к. при
![]() сумма активных сопротивлений
сумма активных сопротивлений
![]() .
.