

21.Общая постановка задачи динамического программирования (дп). Особенности задачи дп
ДП – метод оптимизации многошаговых операций. Такие задачи начал рассматривать Беллман в середине 20 века. Объект управления S:S0→S начальное состояние – конечное состояние. Пусть это управление можно разбить на n шагов, при этом решение будет приниматься на каждом шаге. xk – решение на каждом шаге, Sk – состояние объекта управления после k шага.
![]()
Вводится показатель эффективности управления – целевая функция.
Z = f(S0,x)→opt (1); x = (x1, x2,…,xn)
Состояние системы после k шага зависит только от состояния системы на предыдущем шаге k-1 и управления. Sk=fk(Sk-1,xk)
Прибыль на k шаге зависит от xk и Sk-1. Z=fk(Sk-1,xk)
Прибыль за всю операцию составляет сумма прибыли на каждом шаге
![]()
Задача: Определить такое допустимое управление x, приводящее систему из S0 в Sп, в котором целевая функция (1) принимает свое оптимальное значение. Особенности: Каждая ЗЛП разбивается по n шагов; отсутствует обратная связь, выбор xk зависит только от xk-1; Состояние системы зависит Sk зависит от xk и Sk-1; принцип отсутствие последствия.
22.Принцип оптимальности и уравнения Беллмана
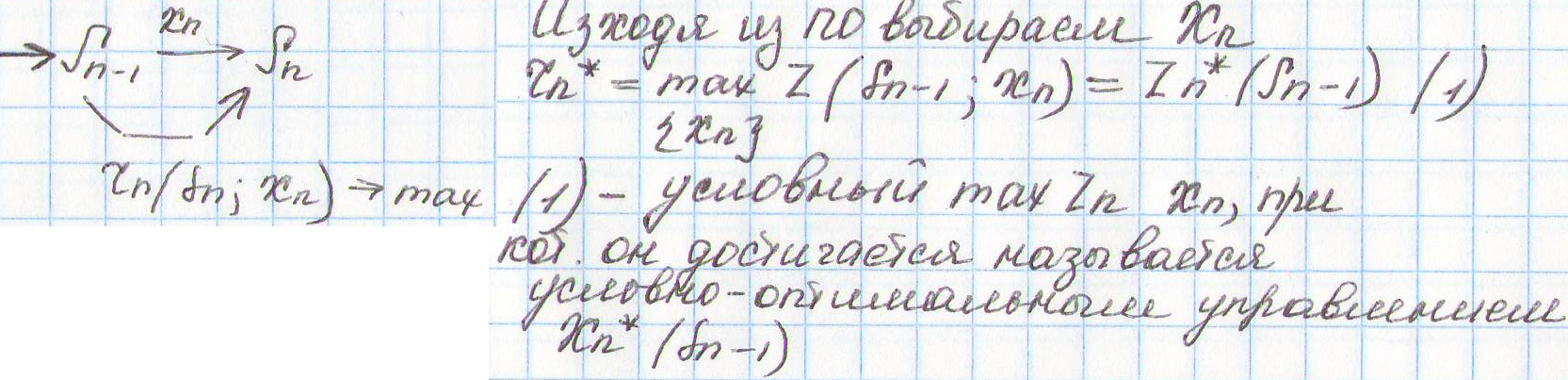
Принцип оптимальности (ПО) – каково бы не было состояние системы в результате какого- либо числа шагов, на очередном поле нужно выбрать xk чтобы оно в совокупности с xk+1 приводило к оптимальному значению Z на всех последующих и данном шаге.
Одношаговая задача (последний шаг)
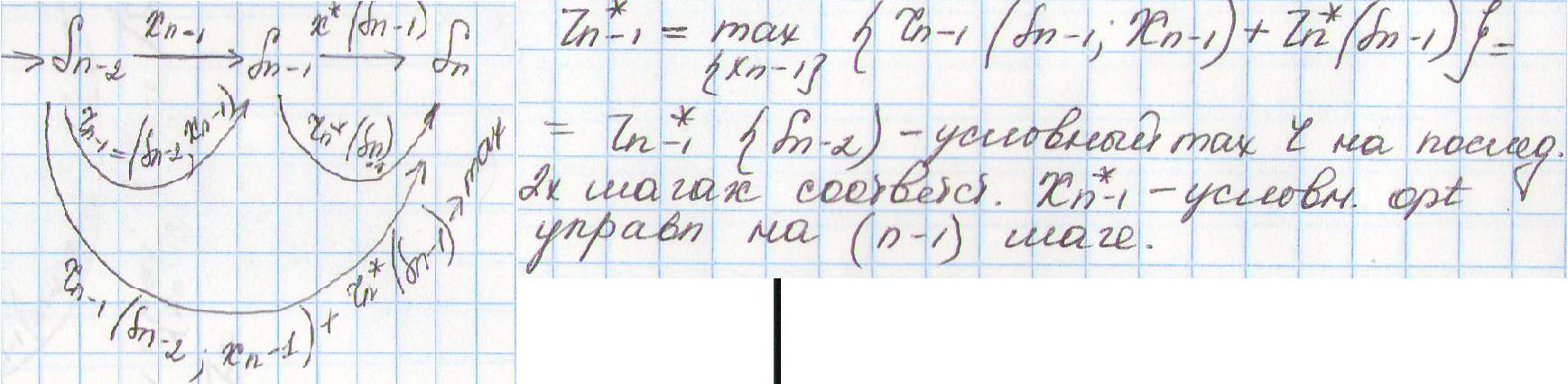
Двух шаговая задача (2 последних шага)
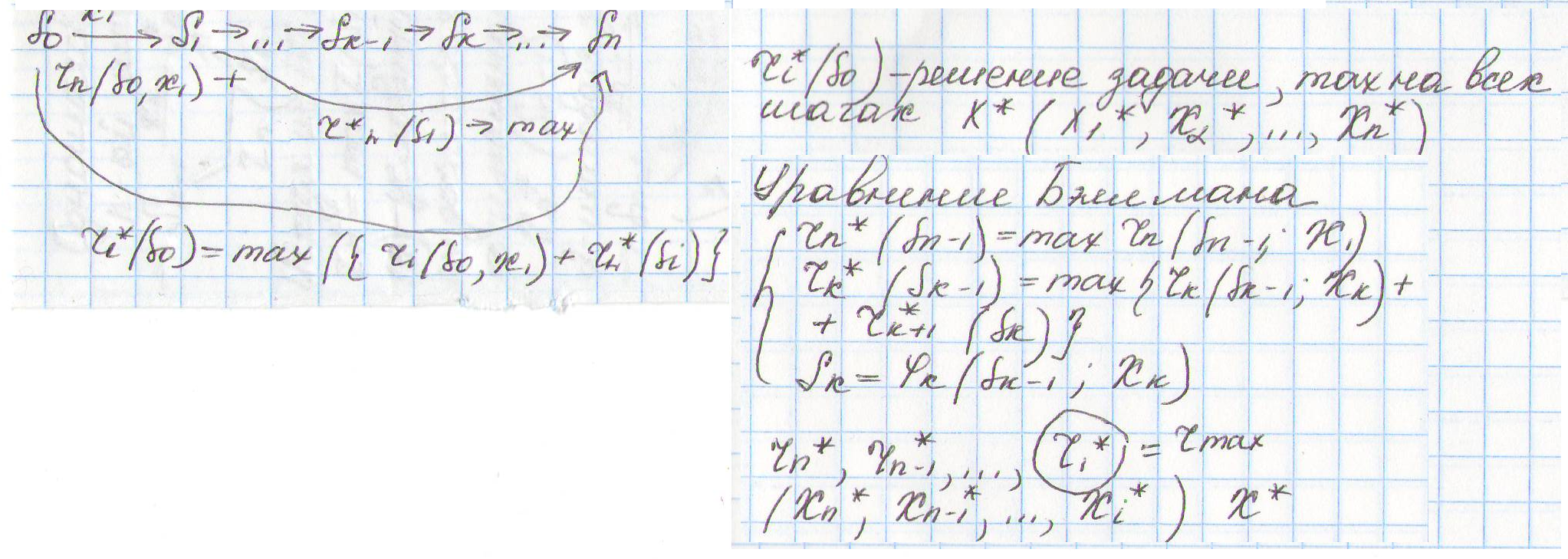
n – шаговая задача
23. Задача о распределении средств между n предприятиями (основные уравнения).
S0=4д.е., размеры вложений кратны 1д.е.
Х |
Z1 |
Z2 |
Z3 |
0 |
0 |
0 |
0 |
1 |
6 |
3 |
4 |
2 |
7 |
4 |
6 |
3 |
11 |
7 |
8 |
4 |
13 |
11 |
13 |
S0->S1 ->S2 ->S3 , S1 =S0-X1 , S2 =S1-X2 , S3 =S2-X3
24. Понятие графа и способы его задания. Степень вершины. Инцидентность. Матрица смежности.
Г![]() раф или неориентированный
граф G-это упорядоченная
пара G:
= (X,U),
для которой выполнены следующие условия:
раф или неориентированный
граф G-это упорядоченная
пара G:
= (X,U),
для которой выполнены следующие условия:
-X это непустое множество вершин или узлов,
-U это множество пар (в случае неориентированного графа — неупорядоченных) вершин, называемых рёбрами.
Графы обычно изображаются в виде геометрических фигур, так что вершины графа изображаются точками, а ребра – линиями, соединяющими те точки, соответствующим вершинам которых ребра инцидентны. Ребро (ab) инциндентно с a, но a с b не инциндентно.
Способы задания графа:
1.явный X={a,b,c,d,e,f}; U={(ab),(ad),(bb),(bc),(bd),(cd),(cd),(ce)}.
2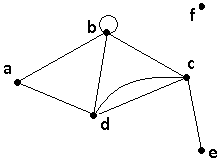 .графический.
Степень вершины- количество
рёбер графа
G,
инцидентных
вершине
x.
Обозначается
d(x).
d(a)=2.
.графический.
Степень вершины- количество
рёбер графа
G,
инцидентных
вершине
x.
Обозначается
d(x).
d(a)=2.
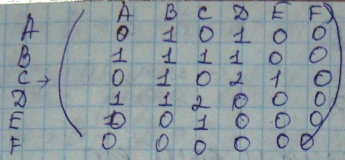
3.матричный. матрицей смежности графа называется матрица размером n×n, где n-число вершин, а Aij равен числу ребер инциндентных к обоим вершинам xi,xj.
An×n={aij}, aij~xi,xj. aij-число ребер (xi,xj).