

29. Окантована матриця Гессе, та її використання при розв'язку нелінійних задач.
Матриця Гессе — квадратна матриця елементами якої є часткові похідні деякої функції. Поняття було введене Людвігом Отто Гессе (1844), який використовував іншу назву. Термін матриця Гессе був введений Джеймсом Джозефом Сильвестром.
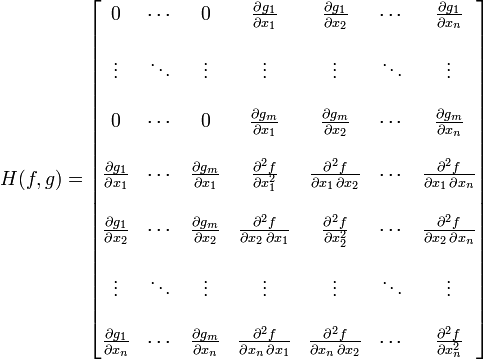
Обрамлена матриця Гессе У випадку оптимізації з додатковими умовами виникає також поняття обрамленої матриці Гессе. Нехай знову маємо функцію:
![]() але
тепер також розглянемо умови:
але
тепер також розглянемо умови:![]() При
оптимізації функції f з додатковими
умовами обрамлена матриця Гессе має
вигляд:
При
оптимізації функції f з додатковими
умовами обрамлена матриця Гессе має
вигляд:
 Для
даної матриці можна сформувати різні
головні мінори.
Позначимо
Для
даної матриці можна сформувати різні
головні мінори.
Позначимо ![]() —
головний мінор матриці, для якого
останнім елементом на головній діагоналі
є
—
головний мінор матриці, для якого
останнім елементом на головній діагоналі
є ![]() Тоді
можна сформувати достатні умови
екстремуму для функції при виконанні
обмежень.
Тоді
можна сформувати достатні умови
екстремуму для функції при виконанні
обмежень.
Функція
буде мати максимум при виконанні умов,
якщо знаки послідовних n -
m мінорів ![]() будуть
чергуватися, при чому знак | Hi(f,g)
| буде рівний ( − 1)m + 1.
будуть
чергуватися, при чому знак | Hi(f,g)
| буде рівний ( − 1)m + 1.
Функція буде мати мінімум при виконанні умов, всі послідовні n - m мінорів мають один знак, а саме ( − 1)m.
30. Структура симплексної таблиці. Базисні та вільні вектори. Оцінковий рядок симплексної таблиці.
У
стовпці «Базис» записані змінні, що
відповідають базисним векторам, а в
стовпці «Сбаз» — коефіцієнти функціонала
відповідних базисних векторів. У стовпці
«План» — початковий опорний план
![]() ,
в цьому ж стовпці в результаті обчислень
отримують оптимальний план. У стовпцях
,
в цьому ж стовпці в результаті обчислень
отримують оптимальний план. У стовпцях
![]() записані коефіцієнти розкладу
кожного j-го вектора за базисом, які
відповідають у першій симплексній
таблиці коефіцієнтам при змінних у
системі (2.37). У (m + 1)-му рядку в стовпці
«План» записують значення функціонала
для початкового опорного плану
записані коефіцієнти розкладу
кожного j-го вектора за базисом, які
відповідають у першій симплексній
таблиці коефіцієнтам при змінних у
системі (2.37). У (m + 1)-му рядку в стовпці
«План» записують значення функціонала
для початкового опорного плану
![]() ,
а в інших стовпцях
— значення оцінок
,
а в інших стовпцях
— значення оцінок
![]() .
Цей рядок симплексної таблиці називають
оцінковим.
.
Цей рядок симплексної таблиці називають
оцінковим.
Після
заповнення табл. 2.6 розраховують
значення оцінок плану (останній рядок):

![]() .
Потім згідно з умовою оптимальності
плану задачі лінійного програмування,
якщо всі
.
Потім згідно з умовою оптимальності
плану задачі лінійного програмування,
якщо всі
![]() (для задачі на максимум), то план є
оптимальним. Допустимо, що одна з оцінок
(для задачі на максимум), то план є
оптимальним. Допустимо, що одна з оцінок
![]() ,
тоді план
не є оптимальним і необхідно здійснити
перехід до наступного опорного плану,
якому буде відповідати більше значення
функціонала.
,
тоді план
не є оптимальним і необхідно здійснити
перехід до наступного опорного плану,
якому буде відповідати більше значення
функціонала.
Використовуючи симплекс метод, вектори, що утворюють одиничну матрицю коефіцієнтів з системи обмежень, називають базисними, всі інші вільними, якщо з поданих векторів одиничну матрицю утворити неможливо, їх вводять штучно з потрібними коефіцієнтами, коефіцієнти вводять в систему обмежень, такі вектори називають штучними.
31. Приведення задачі дробово-лінійного програмування до оптимізаційної задачі лінійного програмування.
Позначимо
 і
введемо заміну змінних
і
введемо заміну змінних
![]() .
Тоді цільова функція матиме вигляд:
.
Тоді цільова функція матиме вигляд:
 .
.
Отримали цільову функцію, що виражена лінійною залежністю.
Оскільки
![]() ,
то звідси маємо:
,
то звідси маємо:
![]() .
Підставимо виражені через нові змінні
значення
в систему обмежень (7.2):
.
Підставимо виражені через нові змінні
значення
в систему обмежень (7.2):
Крім того, з початкової умови
 .
.
Умова (7.3) стосовно невід’ємності змінних набуває вигляду:
![]() .
.
Виконані перетворення приводять до такої моделі задачі:
![]()
![]()
Отримали звичайну задачу лінійного програмування, яку можна розв’язувати симплексним методом.
Допустимо, що оптимальний розв’язок останньої задачі існує і позначається:
![]() .
.
Оптимальні
значення початкової задачі (7.1)—(7.3)
визначають за формулою:
![]()
![]() .
.
32. Як отримати приведений градієнт?
Градієнтні методи належать до наближених методів розв’язування задач нелінійного програмування і дають лише певне наближення до екстремуму, причому за збільшення обсягу обчислень можна досягти результату з наперед заданою точністю, але в цьому разі є можливість знаходити лише локальні екстремуми цільової функції.
В основі градієнтних методів лежить основна властивість градієнта диференційовної функції — визначати напрям найшвидшого зростання цієї функції. Ідея методу полягає у переході від однієї точки до іншої в напрямку градієнта з деяким наперед заданим кроком.
Розглянемо метод Франка — Вульфа, процедура якого передбачає визначення оптимального плану задачі шляхом перебору розв’язків, які є допустимими планами задачі.
Нехай необхідно відшукати
![]()
за лінійних обмежень:
![]() ;
;
![]()
Допустимо, що Х0 — початкова точка, що належить множині допустимих планів даної задачі. В деякому околі цієї точки нелінійну цільову функцію замінюють лінійною і потім розв’язують задачу лінійного програмування. Нехай розв’язок лінійної задачі дав значення цільової функції F0, тоді з точки Х0 в напрямку F0 необхідно рухатись доти, поки не припиниться зростання цільової функції
Розглянемо детальніше перехід від k-ої ітерації методу до (k + 1)-ої ітерації.
Припустимо, що відома точка Xk, яка належить області допустимих розв’язків. У даній точці обчислюємо градієнт цільової функції:
 .
.
Значення градієнта функції задає в даній точці напрям найшвидшого її зростання.
Замінюємо цільову функцію задачі лінійною функцією виду:
![]() .
.
Потім розв’язуємо задачу лінійного програмування з обмеженнями початкової задачі і новою цільовою функцією:
![]()
за умов:
;
![]() .
.
Нехай розв’язком такої задачі є точка .
З початкової точки в напрямку рухаємося з деяким довільним кроком , визначаючи координати нової точки у такий спосіб:
![]()
Для точки Хk+1 повторюємо розглянутий процес, для чого знову розраховуємо значення градієнта і т. д.
У такий спосіб знаходимо послідовність точок , які поступово наближаються до оптимального плану початкової задачі. Ітераційний процес повторюється до того моменту, поки значення градієнта цільової функції не стане рівним нулю або виконуватиметься умова , де — досить мале число, яке означає потрібну точність обчислень.
33. Симплексний метод. Умова оптимальності задач лінійного програування.
Графічний метод для визначення оптимального плану задач лінійного програмування доцільно застосовувати лише для задач із двома змінними. За більшої кількості змінних необхідно застосовувати інший метод. 1949 року такий метод був запропонований американським вченим Дж. Данцігом — так званий симплексний метод, або симплекс-метод.
Ідея цього методу полягає в здійсненні спрямованого перебору допустимих планів у такий спосіб, що на кожному кроці здійснюється перехід від одного опорного плану до наступного, який за значенням цільової функції був би хоча б не гіршим за попередній. Значення функціонала при переході змінюється в потрібному напрямку: збільшується (для задачі на максимум) чи зменшується (для задачі на мінімум).
Процес розв’язання задачі симплекс-методом має ітераційний характер: однотипні обчислювальні процедури (ітерації) повторюються у певній послідовності доти, доки не буде отримано оптимальний план задачі або з’ясовано, що його не існує.
Отже, симплекс-метод — це ітераційна обчислювальна процедура, яка дає змогу, починаючи з певного опорного плану, за скінченну кількість кроків отримати оптимальний план задачі лінійного програмування.
Умова
оптимальності плану задачі на відшукання
мінімального значення функціонала:
якщо для деякого плану
розклад всіх векторів
![]() у даному базисі задовольняє умову
у даному базисі задовольняє умову
![]() то
план Х0 є оптимальним розв’язком задачі
лінійного програмування.
то
план Х0 є оптимальним розв’язком задачі
лінійного програмування.
Отже,
для того, щоб план задачі лінійного
програмування був оптимальним, необхідно
і достатньо, щоб його оцінки
![]() були невід’ємними для задачі на максимум
та недодатними для задачі на мінімум.
були невід’ємними для задачі на максимум
та недодатними для задачі на мінімум.