

Определение положений и перемещений звеньев механизма
Решение задачи проведем графическим и аналитическим методами. В качестве примера возьмем кривошипно-ползунный механизм.
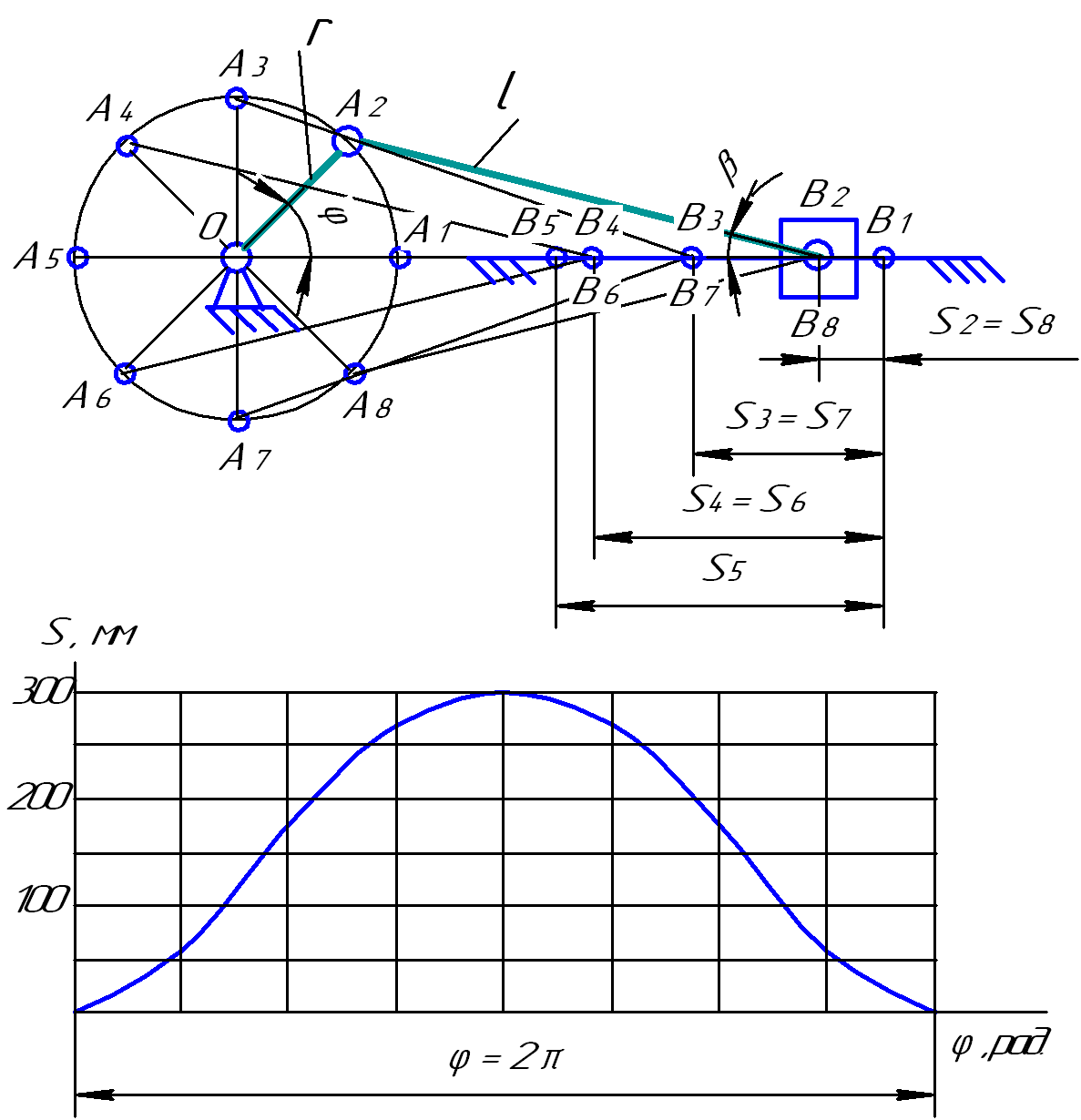
Дано: длина кривошипа r = 150 мм; длина шатуна l = 450 мм; ведущий кривошип (ω = const.)
Положение кривошипа задается углом φ. Цикл движения такого механизма осуществляется за один полный оборот кривошипа – период цикла Т = 60/n = 2π/ω, с. Где n - число оборотов в минуту; ω – угловая скорость, с-1. При этом φ = 2π, рад.
Вычерчиваем кинематическую схему механизма в выбранном масштабе (рис.3.5). На рис.3.5 принят масштаб 1:10. Строим схему механизма в восьми положениях кривошипа (чем больше положений механизма, тем выше точность полученных результатов). Отмечаем положение ползуна (рабочее звено). По полученным данным строим график зависимости перемещения точки В ползуна от угла поворота кривошипа φ (SВ = f(φ)). Этот график называется кинематической диаграммой перемещений точки В.
Аналитический метод
Перемещение ползуна отсчитывается от крайнего правого положения (рис.3.5). Анализируя рисунок, можно записать уравнения
S =(r+l)–(r*cosφ+l*cosβ)
(3.1)
=(r+l)–(r*cosφ+l*cosβ)
(3.1)
r*sin φ = l*sin β
Обозначив r/ l = λ, можно записать
β = arcsin(λ* sin φ).
Следовательно, для каждого угла φ не сложно определить соответствующий угол β, а затем решить первое уравнение системы (3.1). При
Рис. 3.5 этом точность результатов будет определяться только заданной точностью расчетов.
В [1] приведена приближенная формула для определения перемещений ползуна
S = r*(1 - cos φ + sin2 φ* λ /2) (3.2)
Определение скоростей и ускорений точек и звеньев механизма
Скорости и ускорения ведомых звеньев механизма могут быть определены методами планов, кинематических диаграмм и аналитическими. Во всех случаях в качестве исходных должны быть известны: схема механизма при определенном положении ведущего звена, его скорость и ускорение.
Рассмотрим применение указанных методов на примере кривошипно-ползунного механизма (рис.3.5) при φ = 45о и n = 1200 об/мин, соответственно ω = π*n/30 = 125,7 с-1.
План скоростей (ускорений) механизма.
Планом скоростей (ускорений) механизма называется фигура, образованная векторами скоростей (ускорений) точек звеньев при заданном положении механизма.
 Построение
плана скоростей
Построение
плана скоростей
Известно
![]()
По величине VАО = ω* r = 125,7*0,15 = 18,9 м/с.
Выбираем масштаб построения, например, 1м/(с*мм).
Отмечаем какую-нибудь точку в качестве полюса Р при построении плана скоростей (рис.3.6).
От
полюса откладываем вектор
![]() ,
,
Рис.
3.6
перпендикулярно
АО.
Вектор
скорости точки
В
находим
путем графического решения уравнения
![]() Известно
направление
векторов.
Вектор
Известно
направление
векторов.
Вектор
![]() лежит
на горизонтальной прямой, а вектор
лежит
на горизонтальной прямой, а вектор
![]() перпендикулярен
ВА.
Из полюса и конца вектора
перпендикулярен
ВА.
Из полюса и конца вектора
![]() проводим
соответствующие прямые и замыкаем
векторное уравнение. Замеряем
расстояние
Pb
и
ba
и, с учетом масштаба, находим
проводим
соответствующие прямые и замыкаем
векторное уравнение. Замеряем
расстояние
Pb
и
ba
и, с учетом масштаба, находим
 VВ
= 16,6
м/с, VВА
= 13,8
м/с.
VВ
= 16,6
м/с, VВА
= 13,8
м/с.
Построение плана ускорений (рис.3.7)
Ускорение
точки А
равно
![]() ,
поскольку
,
поскольку
![]() = 0.
= 0.
![]() .
По
величине нормальное ускорение anАО
= ω2*
r
=
.
По
величине нормальное ускорение anАО
= ω2*
r
=
= 125,72*0,15 = 2370 м/с2.
Касательное ускорение atАО = ε* r = 0, так как угловое ускорение ε = 0, поскольку ω = const.
Рис. 3.7
Выбираем
масштаб построения, например, 100м/(с2*мм).
Откладываем
от полюса
ра
вектор
![]() ,
параллельный
АО
от А
к
О.
Вектор ускорения
точки
В
находим
путем графического решения уравнения
,
параллельный
АО
от А
к
О.
Вектор ускорения
точки
В
находим
путем графического решения уравнения
![]() .
Вектор
.
Вектор
![]() направлен
параллельно
ВА
от В
к А,
его
величина равна
anВА
= VВА2/
l
= 13,82/0,45
= 423 м/с2.
направлен
параллельно
ВА
от В
к А,
его
величина равна
anВА
= VВА2/
l
= 13,82/0,45
= 423 м/с2.
aВ = 1740 м/с2; atВА = 1650 м/с2.
Метод кинематических диаграмм (рис.3.8)
Метод кинематических диаграмм – это графический метод. Он включает в себя графическое дифференци-рование сначала графика перемещений, а затем графика скорости. При этом кривые перемещений и скорости заменяются ломаной линией. Значение средней скорости на элементарном участке пути можно выразить в виде
![]()

µS – масштаб перемещения.
µt – масштаб времени.
В нашем случае
µS = 0,01 м/мм;
µ t = 0,000625 с/мм.
Масштаб скорости равен
µV = µS/(µ t*HV) =
0,01/(0,000625*30) =
= 0,533 м/(с*мм).
Масштаб ускорения равен
µа = µV/(µ t* Hа) =
0,533/(0,000625*30) =
= 28,44 м/(с2*мм).
Порядок построения диаграммы скорости.
На расстоянии HV (20…40мм) ставится точка О – полюс построения. Из полюса проводятся прямые, параллельные отрезкам ломаной линии графика перемещения, до пересечения оси ординат. Ординаты переносятся на график скорости в середину соответствующих участков. По полученным точкам проводится кривая – это и есть диаграмма скорости.
Диаграмма ускорения строится аналогично, только исходным графиком становится диаграмма скорости, замененная ломаной линией.
Для указания численных значений скорости и ускорения рассчитывается масштаб построения, как показано выше.
Скорости и ускорения ползуна можно определить и аналитическим способом, путем последовательного дифференцирования приближенного уравнения (3.2).
![]() (3.3)
(3.3)
![]() (3.4)
(3.4)
Знание скоростей и ускорений звеньев механизма необходимо для динамического анализа механизма, в частности, для определения сил инерции, которые могут при больших ускорениях (как в нашем случае) многократно превышать статические нагрузки, например, вес звена.
Ввиду краткости нашего курса, мы не проводим силовое исследование механизмов, но Вы самостоятельно можете ознакомиться с ним по литературе, в частности, рекомендованной в этом разделе.
В теории механизмов и машин рассматриваются вопросы геометрии зубчатого зацепления, а так же вопросы трения в кинематических парах. Мы тоже рассмотрим эти вопросы, но в разделе « детали машин », применительно к конкретным случаям и задачам.
Литература
Первицкий Ю.Д. Расчет и конструирование точных механизмов. – Л.: Машиностроение,
1976. – 456 с.
Заблонский К.И. Прикладная механика. – Киев : Вища школа, 1984. – 280 с.
Королев П.В. Теория механизмов и машин. Конспект лекций. – Иркутск : Издательство
ИрГТУ, 2001. – 104 с.