

Степень подвижности механизма
Степенью подвижности механизма называется число степеней свободы механизма относительно неподвижного звена (стойки).
Степень подвижности плоского механизма (все звенья движутся в параллельных плоскостях) определяется по формуле П.Л. Чебышева
W = 3n - 2P5 – P4,
где n – число подвижных звеньев; P5 – число КП 5-го класса; P4 – число КП 4-го класса.
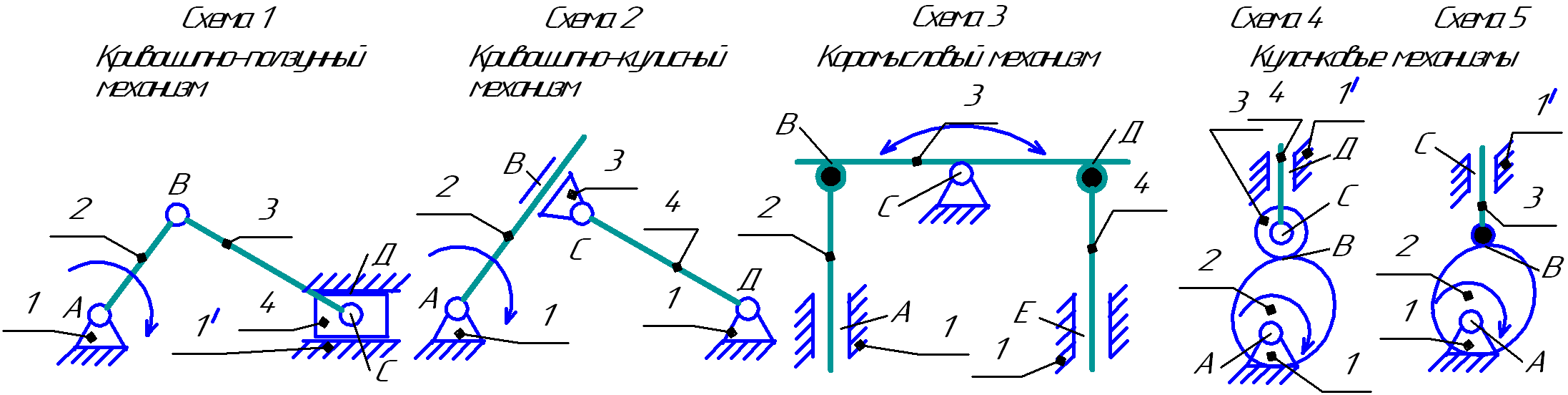
Рис. 3.2 Схемы механизмов
На рис.3.2 показано несколько схем механизмов. Запишем названия звеньев, дадим характеристику кинематическим парам и определим степень подвижности каждого механизма.
Схема 1: 1 – стойка; 11 – направляющая; 2 – кривошип; 3 – шатун; 4 – ползун; А, В, С – низшие вращательные КП 5-го класса; Д – низшая поступательная КП 5-го класса.
W = 3n - 2P5 – P4 = 3*3 – 2*4 = 1.
Схема 2: 1 – стойка; 2 – кривошип; 3 – кулиса; 4 – коромысло; А, С, Д – низшие вращательные КП 5-го класса; В – низшая поступательная КП 5-го класса.
W = 3n - 2P5 – P4 = 3*3 – 2*4 = 1.
Схема 3: 1 – направляющая; 2, 4 – ползуны (толкатели); 3 – коромысло; А, Е – низшие поступательные КП 5-го класса; С – низшая вращательная КП 5-го класса; В, Д – высшие КП 4-го класса.
W = 3n - 2P5 – P4 = 3*3 – 2*3 - 2 = 1.
Схема 4: 1 – стойка; 11 направляющая; 2 – кулачок; 3 – ролик; 4 – ползун (толкатель); А, С – низшие вращательные КП 5-го класса; Д – низшая поступательная КП 5-го класса; В – высшая КП 4-го класса.
W = 3n - 2P5 – P4 = 3*3 – 2*3 - 1 = 2.
Схема 5: 1 – стойка; 11 направляющая; 2 – кулачок; 3 – ползун (толкатель); А - низшая вращательная КП 5-го класса; С – низшая поступательная КП 5-го класса; В – высшая КП 4-го класса.
W = 3n - 2P5 – P4 = 3*2 – 2*2 - 1 = 1.
На схемах 4 и 5 показаны кулачковые механизмы, имеющие, соответственно 2 и 1 степени подвижности, хотя очевидно, что толкатели этих механизмов имеют одну степень свободы. Лишняя степень подвижности механизма (схема 4) вызвана наличием звена 3 (ролика), которое не влияет на закон движения рабочего звена (толкателя). При структурном и кинематическом анализах механизмов такие звенья удаляют из схемы механизма.
Замена высших кинематических пар низшими
При структурном, кинематическом и силовом исследованиях механизмов в некоторых случаях целесообразно заменить механизм с высшими парами 4-го класса эквивалентным механизмом с низшими парами 5-го класса. При этом число степеней свободы и мгновенное движение звеньев у эквивалентного заменяющего механизма должно быть таким же, как у заменяемого механизма.
Н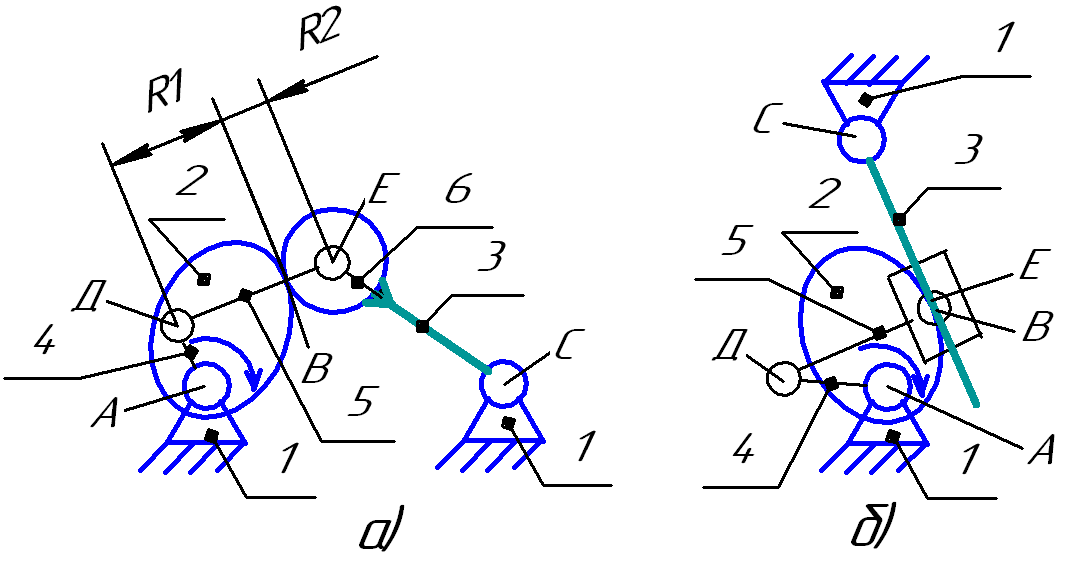 а
рис.3.3, а) показана замена кулачкового
механизма, состоящего из звеньев 1, 2, 3,
шарнирным четырехзванником, составленного
из звеньев 1, 4, 5, 6. Высшая кинематическая
пара В
заменена низшими парами Д,
Е.
На рис.3.3, б) кулачковый механизм 1, 2, 3
заменен
а
рис.3.3, а) показана замена кулачкового
механизма, состоящего из звеньев 1, 2, 3,
шарнирным четырехзванником, составленного
из звеньев 1, 4, 5, 6. Высшая кинематическая
пара В
заменена низшими парами Д,
Е.
На рис.3.3, б) кулачковый механизм 1, 2, 3
заменен
Рис. 3.3 кривошипно-кулисным механизмом 1, 4, 5, 3. Высшая пара В заменена низшими парами Д, Е.
Алгоритм замены высших кинематических пар на низшие следующий:
через точку контакта звеньев в высшей КП проводится нормаль; 2) на нормали на расстояниях радиусов кривизны (R1 и R2, рис.3.3, а) ставятся низшие КП; 3) полученные КП соединяются звеньями с уже бывшими в механизме низшими КП.