

3.6.1 Внутрисистемный интерфейс amba ahb
Внутрисистемный интерфейс AHB (Advanced High-performance Bus – расширенная высокопроизводительная шина) предназначен для объединения быстродействующих, высокопроизводительных модулей, работающих на высоких тактовых частотах.

Рис. 63. Схема типичного микроконтроллера на базе шины AMBA-AHB.
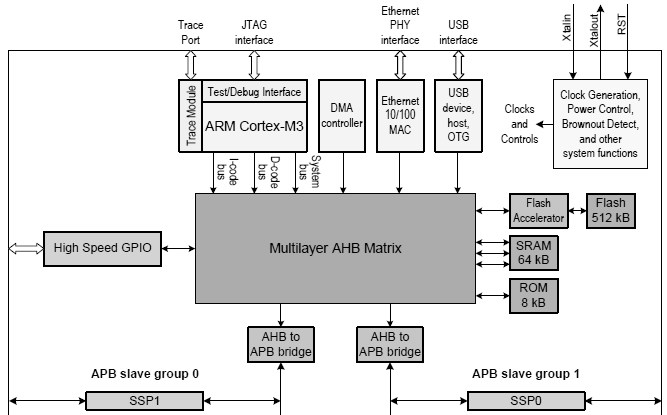
Рис. 64. Пример использования шины AMBA AHB в микроконтроллере NXP LPC1768 на базе Cortex-M3.
AHB позволяет соединить ядро микропроцессора с внутренними и внешними модулями памяти, контроллерами ПДП, быстродействующими сетевыми контроллерами Fast Ethernet, контроллерами USB-2.0 и т.д.
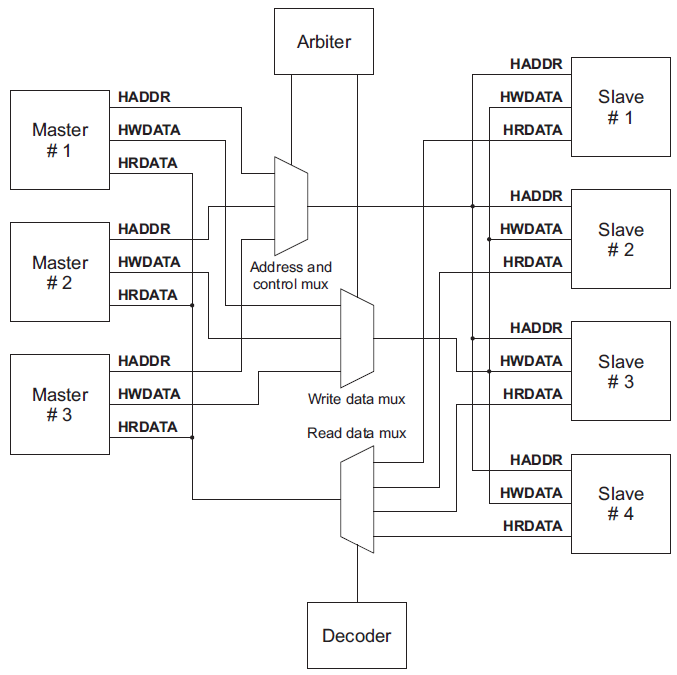
Рис. 65. Схема взаимодействия главных и подчиненных устройств, подключенных к шине AMBA AHB.
На рисунке показан фрагмент структуры микроконтроллера NXP LPC1768, выполненного на базе ядра ARM Cortex-M3. На схеме видно, что шиной AHB объединены вместе практически все элементы микроконтроллера, требующие большой скорости обмена данными. Через два моста, к шине AHB подключены две независимые шины APB, к которым подключаются сравнительно медленные периферийные устройства (UART, I2C, таймеры и так далее).
На рисунке шина AHB названа Matrix (матрица). Такое название справедливо, так как на самом деле шина является коммутатором, матрицей, связывающей несколько устройств попарно друг с другом в различные моменты времени. На рисунке ниже можно посмотреть реализацию шины AHB.
Мы видим, что арбитр шины управляет мультиплексорами, к которым подключены шины адреса и шины записи данных из главных устройств (Master) в подчиненные (Slave). Декодер управляет мультиплексором, через который считываются данные с подчиненных устройств. Хорошо видно, что для записи и чтения существуют раздельные шины.

Рис. 66. Простой обмен данными на шине AMBA AHB.
Опишем простой вариант обмена данными на шине AMBA AHB:
1. Главное устройство выставляет адрес и управляющие сигналы по фронту сигнала HCLK.
2. Подчиненное устройство считывает значения с шины адресы (HADDR)
и шины управления (Control) на следующем фронте HCLK.
3. После считывания адреса и данных подчиненное устройство может выдать ответ на шину в этом же цикле (сигнал HREADY активен).
4. Главное устройство считывает данные, выставленные подчиненным устройством в третьем цикле шины.
Подчиненное устройство может вставлять такты неготовности, используя сигнал HREADY (см. рисунок выше). Такт неготовности – это такой такт, во время которого обмен по шине не производится вследствие отсутствия готовых данных у одного из устройств.
119
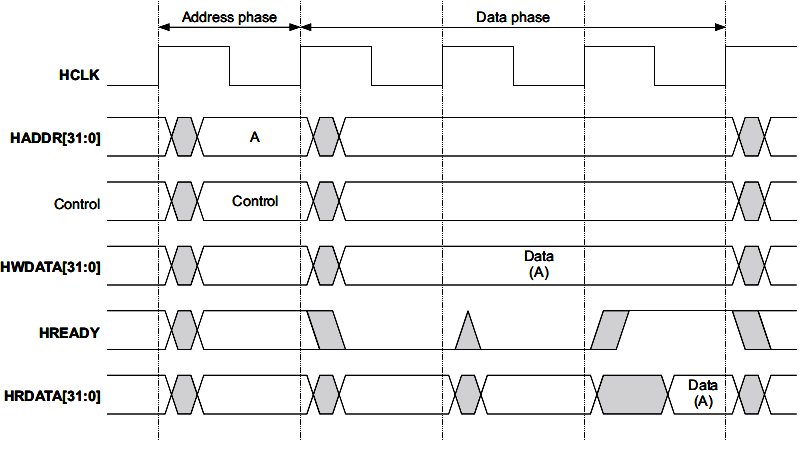
Рис. 67. Передача данных с тактами неготовности.
В отличие от предыдущего рисунка здесь хорошо видно, что во втором и третьем тактах шины сигнал HREADY равен нулю. Такты неготовности используются для того, чтобы синхронизировать быстрое главное устройство и более медленное подчиненное.

Рис. 68. Пример различных типов обмена на шине.
В зависимости от состояния сигнала HTRANS[1:0] может быть выделено четыре типа передач на шине:
1. IDLE. Передача данных не требуется.
2. BUSY. Позволяет вставлять IDLE циклы в середину пакетной передачи.
3. NONSEQ. Индицирует начало одиночной или пакетной передачи. Адрес установленный в предыдущем цикле шины игнорируется.
120
4. SEQ. Показывает, что адрес в новом цикле шины инкрементируется на
1, а сигналы на шине управления такие же.
Тип пакетной передачи определяется сигналом HBURST[2:0]. Существует
8 вариантов пакетной передачи:
1. SINGLE (000) – одиночная передача.
2. INCR (001) – инкрементная передача с неизвестной длиной.
3. WRAP4 (010) – циклическое окно на 4 адреса.
4. INCR4 (011) – инкрементная передача на 4 адреса.
5. WRAP8 (100) – циклическое окно на 8 адресов.
6. INCR8 (101) – инкрементная передача на 8 адресов.
7. WRAP16 (110) – циклическое окно на 16 адресов.
8. INCR16 (111) – инкрементная передача на 16 адресов.
Режим WRAP (циклическое окно) позволяет работать циклически, по кругу, в заданном окне адресов. Режим INCR предполагает простой инкремент (прибавление на единицу) адреса в каждом цикле шины.

Рис. 69. Пример использования режима WRAP4.
121
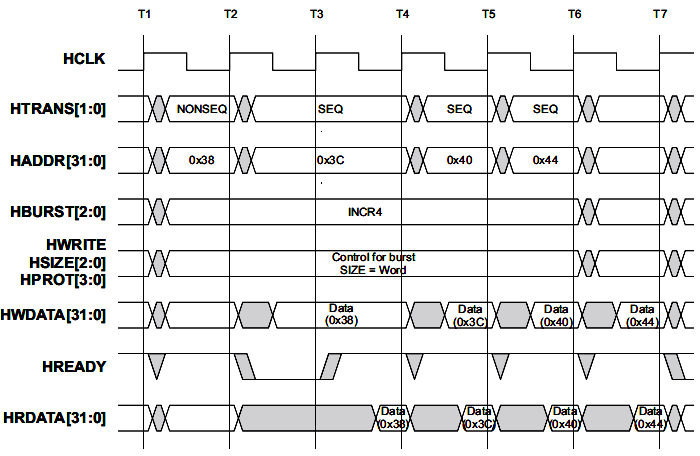
Рис. 70. Пример использования режима INCR4.
При передаче данных сигнал HWRITE становится активным (переводится в логическую «1»). В зависимости от состояния линий HSIZE[2:0] передаваться за один раз может 8, 16, 32, 64, 128, 256, 512 или 1024 бита данных. Эти биты (HSIZE) работают совместно с сигналами HBURST.
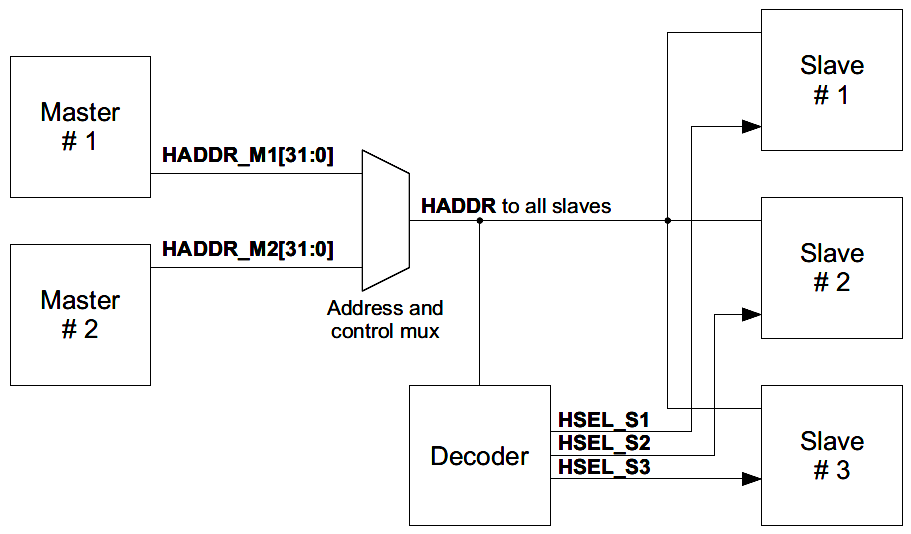
Рис. 71. Выбор подчиненного устройства с помощью сигналов HSEL.
Сигнал HPROT[3:0] определяют уровень защиты передаваемой информации: код операции, доступ к данным, пользовательский доступ, привилегированный доступ и так далее.
Выбор подчиненного устройство происходит с помощью декодера адреса, формирующего сигналы HSEL.
122
Сигнал HREADY используется для информирования главного устройства о завершении или продолжении передачи данных. Если уровень этого сигнала активный, то передача данных завершена.

Рис. 72. Пример использования сигнала HRESP.
Сигнал HRESP[1:0] используется для подтверждения транзакции. Его значениями могут быть: OKAY – транзакция завершена успешно, ERROR – ошибка, RETRY – повторить попытку, SPLIT – данные переданы не полностью.
Сигналы HWDATA[31:0] используются для передачи данных от главного устройства к подчиненным.
Сигналы HRDATA[31:0] используются для передачи данных от подчиненных устройств к главным.
Арбитраж используется для того, чтобы только один мастер имел доступ к шине в один момент времени. Рассмотрим основные сигналы:
HBUSREQx – запрос шины у арбитра шины.
HLOCKx – сигнал, выставляемый мастером и означающий захват шины.
HGRANTx – сигнал, выставляемый арбитром и обозначающий, что мастер получил доступ к шине.
HMASTER[3:0] – сигнал показывающий номер мастера, захватившего шину.
123

Рис. 73. Пример арбитража.
На рисунке видно, что в первом такте шины главное устройство выставляет сигнал запроса шины HBUSREQx. В третьем такте арбитр подтверждает захват шины сигналом HGRANTx. На четвертом такте арбитр выставляет сигнал HMASTER с номером главного устройства, захватившего шину.