

4.4. Определение ускорения точки
Ускорение точки характеризует изменение ее скорости в рассматриваемой системе отсчета с течением времени.
4.4.1. Векторный
способ.
Пусть за время t точка
переместилась из положения M,
где она имела скорость
,
в положение
,
где ее скорость стала равной ![]() (рис.
4.5). Вектор скорости получил приращение
(рис.
4.5). Вектор скорости получил приращение ![]() .
Средним ускорением точки за интервал
времени t называют
отношение
.
Средним ускорением точки за интервал
времени t называют
отношение ![]() .
Предел среднего ускорения
.
Предел среднего ускорения
![]() (4.12)
(4.12)
н азывают ускорением
точки в данный момент времени или
просто ускорением точки.
азывают ускорением
точки в данный момент времени или
просто ускорением точки.
Таким
образом, ускорение точки – это мера
изменения ее скорости, равная производной
по времени от скорости точки в
рассматриваемой системе отсчета. Так
как ![]() Вектор
среднего ускорения лежит в плоскости,
образуемой векторами
и
.
При уменьшении t точка
приближается
к точке М,
и плоскость векторов
Вектор
среднего ускорения лежит в плоскости,
образуемой векторами
и
.
При уменьшении t точка
приближается
к точке М,
и плоскость векторов ![]() изменяет
свое положение в пространстве,
поворачиваясь вокруг вектора
.
Предельное положение этой плоскости
называют соприкасающейся
плоскостью кривой в
точке М (см.
рис. 4.2, плоскость Мn).
Следовательно, вектор ускорения лежит
в соприкасающейся плоскости и направлен
в сторону вогнутости траектории (см.
рис. 4.5).
изменяет
свое положение в пространстве,
поворачиваясь вокруг вектора
.
Предельное положение этой плоскости
называют соприкасающейся
плоскостью кривой в
точке М (см.
рис. 4.2, плоскость Мn).
Следовательно, вектор ускорения лежит
в соприкасающейся плоскости и направлен
в сторону вогнутости траектории (см.
рис. 4.5).
Единица
измерения ускорения в системе СИ – ![]() .
.
4.4.2. Координатный
способ.
Представим вектор скорости в виде ![]() .
Тогда, учитывая неизменность ортов
.
Тогда, учитывая неизменность ортов ![]() ,
в соответствии с формулой (4.12) получим
ускорение
,
в соответствии с формулой (4.12) получим
ускорение
![]()
и его проекции:
![]() .
(4.13)
.
(4.13)
По проекциям ускорения определим его модуль
![]() (4.14)
(4.14)
и направляющие косинусы:
![]() .
(4.15)
.
(4.15)
4.4.3. Естественный
способ. Представим
вектор скорости в виде (4.11) ![]() ,
тогда из формулы (4.12) получим
,
тогда из формулы (4.12) получим
![]() .
(4.16)
.
(4.16)
Определим
модуль и направление вектора ![]() ,
для чего рассмотрим два случая.
,
для чего рассмотрим два случая.
Случай
1. Точка М движется
в сторону увеличения координаты S (рис.
4.6,а). За время t она
перемещается из положения М в
положение
,
при этом ее координата увеличивается
на величину S,
а вектор ![]() получает
приращение
получает
приращение ![]() ,
направленное в сторону вогнутости
траектории. Вектор
,
направленное в сторону вогнутости
траектории. Вектор ![]() направлен
перпендикулярно вектору
в
сторону вогнутости траектории и лежит
в соприкасающейся плоскости. Вектор
имеет
такое же направление, так как
координата S возрастает,
при этом
направлен
перпендикулярно вектору
в
сторону вогнутости траектории и лежит
в соприкасающейся плоскости. Вектор
имеет
такое же направление, так как
координата S возрастает,
при этом ![]() .
.
Случай
2. Точка М движется
в сторону уменьшения координаты S (рис.
4.6,б). Вектор
,
а вместе с ним и вектор ![]() ,
направлены в сторону выпуклости
траектории. Вектор
имеет
противоположное направление, так как
,
направлены в сторону выпуклости
траектории. Вектор
имеет
противоположное направление, так как ![]() .
Таким образом, вектор
всегда
направлен по главной нормали к траектории
в сторону вогнутости и может быть
представлен в виде:
.
Таким образом, вектор
всегда
направлен по главной нормали к траектории
в сторону вогнутости и может быть
представлен в виде:
![]() .
(4.17)
.
(4.17)
|
|

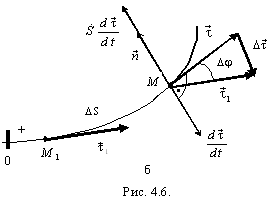
Определим
модуль вектора
.
Учитывая, что ![]() равнобедренный
(см. рис. 4.6,а) и
равнобедренный
(см. рис. 4.6,а) и ![]() ,
получим
,
получим
![]() .
(4.18)
.
(4.18)
Из формул (4.17) и (4.18) следует
![]() .
.
откуда,
учитывая, что ![]() ,
где k –
кривизна, а ρ – радиус кривизны траектории
в данной точке, получим
,
где k –
кривизна, а ρ – радиус кривизны траектории
в данной точке, получим
![]() .
(4.19)
.
(4.19)
Подставим (4.19) в (4.16)
![]() .
(4.20)
.
(4.20)
Таким образом, вектор ускорения имеет две составляющие: касательную и нормальную.
Касательное ускорение
![]() (4.21)
(4.21)
направлено по касательной к траектории в сторону увеличения координаты S, если алгебраическая скорость точки возрастает, или в сторону уменьшения S, если убывает. Проекция касательного ускорения на ось :
![]() .
(4.22)
.
(4.22)
Нормальное ускорение
![]() (4.23)
(4.23)
всегда направлено по нормали к траектории в сторону вогнутости, его проекция на ось n:
![]() .
4.24)
.
4.24)
Так
как ![]()
![]() (рис.
4.7), модуль вектора ускорения находим
по формуле
(рис.
4.7), модуль вектора ускорения находим
по формуле
![]() .
(4.25)
.
(4.25)
Касательное ускорение характеризует изменение скорости точки по модулю, а нормальное – по направлению.
 Касательное
ускорение равно нулю:
Касательное
ускорение равно нулю:
1) если точка движется с постоянной алгебраической скоростью;
2) в те моменты времени, когда скорость принимает экстремальные значения.
Нормальное ускорение равно нулю:
1) при прямолинейном движении ( = );
2) в точках перегиба траектории ( = );
3) в те моменты времени, когда скорость точки равна нулю.