

ЛАБОРАТОРНАЯ РАБОТА № 2
Полное уравновешивание (балансировка) вращающихся масс ротора при неизвестном расположении неуравновешенных масс.
Цель работы
Определение величины и расположения противовесов в двух произвольно выбранных плоскостях, перпендикулярных оси вращения ротора.
Экспериментальная проверка уравновешенности вращающегося ротора.
Описание работы и установки ТММ-1
Расчет уравновешивающих противовесов подобно тому, как это делается в лабораторной работе, изложенной в § 2, может быть сделан только в том случае, если известны и положения неуравновешенных масс. В практике такие случаи встречаются редко. Поэтому надо считать, что величины неуравновешенных масс, а также их. координаты неизвестны.
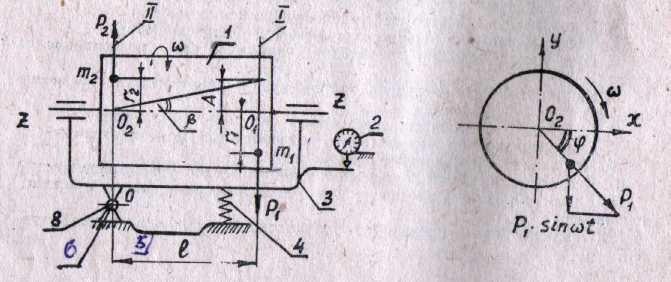
Рис. 1
Для балансировки таких роторов применяются специальные балансировочные станки (машины). Ниже дается описание балансировочного станка системы Б. В. Шитикова. Схема станка дана на рис. 1, а его устройство на рис. 2. Балансируемый ротор 1 установлен на своих подшипниках в жесткой раме 3. Последняя шарниром 6 связана с неподвижным основанием 5. Ось шарнира 6 расположена горизонтально и должна быть перпендикулярна оси ротора 1. Рама 3 поддерживается пружиной 4, поэтому ротор вместе с рамой 3 образует упругую систему, которая может колебаться относительно оси шарнира 6.
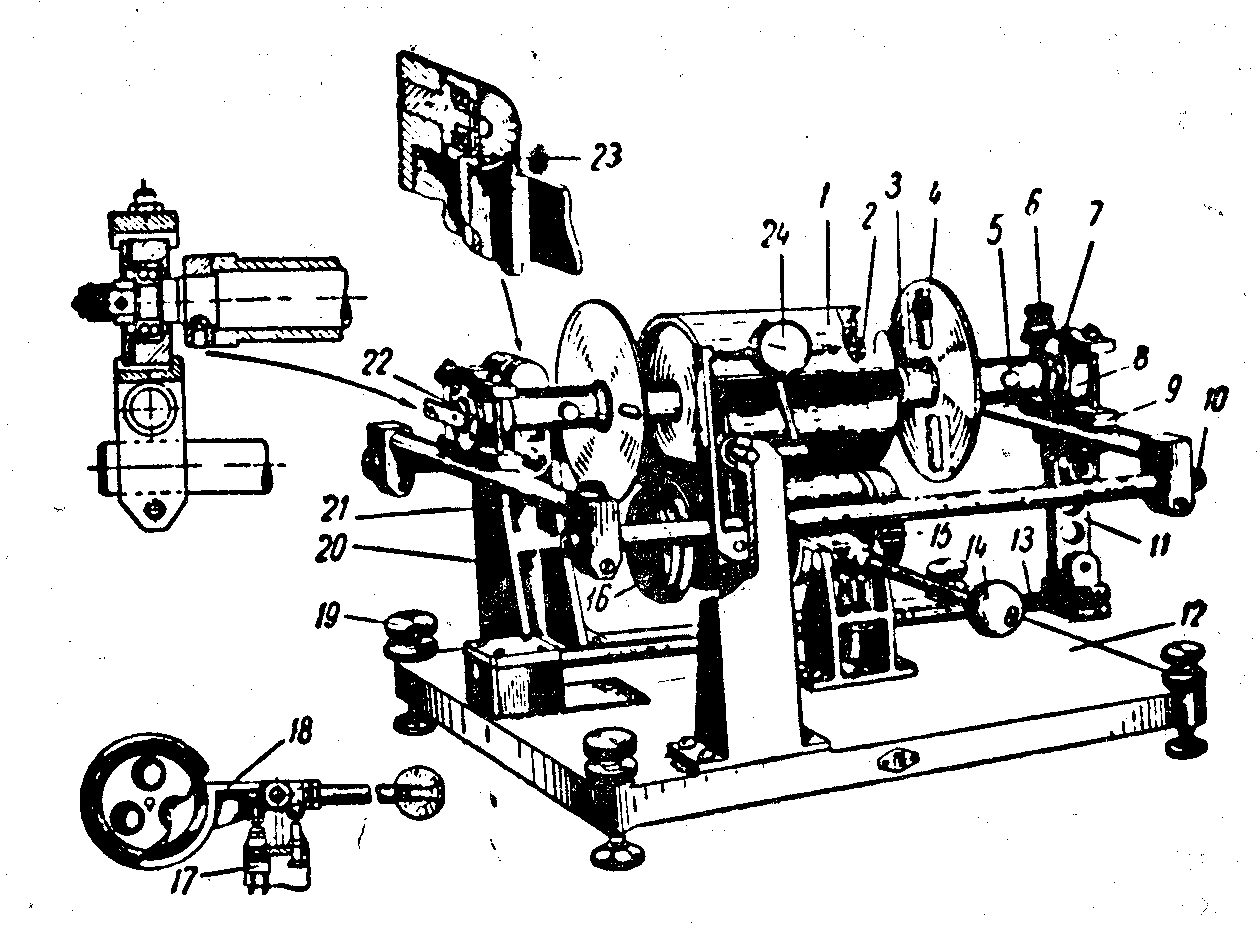
Рис. 2
Расстояние между плоскостями исправления задается величиной l. Заменим все неуравновешенные массы ротора массами, расположенными в плоскостях I—I и II—II. При вращении ротора с угловой скоростью массы mI и mII разовьют центробежные силы инерции:
![]() и
и
![]()
Сила P2 лежит в плоскости II—II, проходящей через ось качания рамы, поэтому она уравновешивается реакцией в шарнире. Силу P1 можно разложить на составляющие по оси х и у:
![]() и
и
![]()
Эти составляющие, действуя относительно точки О на плече l, создадут моменты, передаваемые раме 3. Момент от P1x будет уравновешиваться реактивным моментом шарнира 6. Момент от вертикальной составляющей будет вызывать вынужденные угловые колебания рамы с ротором.
Если разогнать ротор за резонансное число оборотов и дать ему возможность выбегать, то, по мере убывания угловой скорости ротора уменьшится и частота изменения возмущающего момента. Когда эта частота со станет близкой к собственной частоте колебаний системы К, возникает состояние резонанса. В это время амплитуда колебаний рамы 3 станет наибольшей. Из теории колебаний известно, что при резонансе амплитуда А вынужденных колебаний может считаться пропорциональной амплитуде возмущающего фактора,
![]()
где - коэффициент пропорциональности, зависящей от постоянных параметров данной установки. Если определить постоянную данного станка, то по амплитуде А, зафиксированной на индикаторе, можно установить величину силы P1y, определяющей дисбаланс, отнесенной к плоскости I. Это дает возможность определить искомое значение mIrI. Таким же образом, повторив испытание, но установив ротор плоскостью I—I на место II—II, можно определить значение mIIrII.
Для определения коэффициента пропорциональности и направлений, в которых необходимо установить массу mI, разгоняем ротор до быстрого вращения, после чего отключаем приводное устройство, переводим ротор в режим выбега и измеряем величину максимальной амплитуды по индикатору 2. Пусть эта амплитуда равна А1[мм].
Устанавливаем в плоскости уравновешивания I—I добавочную массу mД на некотором расстоянии rД от оси вращения летали, приводим во вращение ротор и снова замеряем амплитуду А2. Поворачивая добавочную массу mД в .плоскости исправления I—I на 180° на том же расстоянии rД и замеряем амплитуду А3. По полученным амплитудам можно получить величину mIrI.
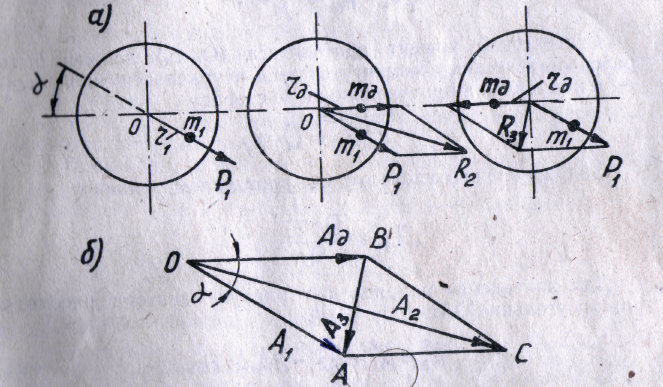
Рис. 3
На рис. 3, а дано построение параллелограммов сил для указанных двух положений добавочной массы mД. Эти параллелограммы равны, так как имеют равные стороны и равные углы. На рис. 3,б построен параллелограмм ОВСА, в котором силы заменены пропорциональными им величинами амплитуд, причем стороны А1, А2, Аз известны.
Сторона Ад неизвестна и равна той максимальной амплитуде, которая получилась бы при резонансе от одной добавочной массы mД. Известно, что в параллелограмме
![]()
тогда
![]()
но
![]()
Статический момент от веса искомой неуравновешенной массы может быть получен из формулы:
![]()
Статический момент противовеса (Qn-rn) должен быть равен статическому моменту от веса неуравновешенной массы и направлен в противоположную сторону
![]()
Задавшись противовесом Qn, определяем величину
![]()
Для проведения направления радиуса вектора рассмотрим треугольник ОАВ (рис. 9, б).
Одному значению косинуса соответствуют два значения угла : + и — Следовательно, противовес должен быть расположен на одном из диаметров, определяемых углом а (рис. 9).
Таким же способом определяется и вес второго противовеса в плоскости уравновешивания II—П. Для этого необходимо ротор раскрепить в подшипниках и повернуть его на 180°, т. е. поменять местами плоскости I—I и II—П. Это является недостатком станка Б. В. Шитикова,
Порядок проведения работы
Принадлежности: станок типа ТММ-1, набор грузов, калькулятор, бланк-форма отчета по лабораторной работе.
Основные параметры станка ТММ-1:
Собственная частота колебаний рамы — 6—7 герц
Точность измерения амплитуды — 0,01 мм
Цена деления лимба — 1°
Цена деления шкалы дисков — 1 мм
. Вес добавочных грузов — 10, 20, 30, 40 г
Электродвигатель мощностью — 30 Вт
Напряжение питания - 220 В
Вес станка — 56 кг
1. Станок подготавливается к работе:
а) диск 3 по шкале 7 устанавливается на ноль;
б) указатель точного отсчета индикатора 2 устанавливается на ноль;
в) рама 10 по уровню 21 винтами 19 устанавливается в горизонтальное положение.
2. Производится измерение амплитуды А1 при резонансе от собственной неуравновешенности ротора. Амплитуда измеряется три раза и вычисляется ее среднее значение:
![]()
Результаты заносятся в таблицу 1.
Примечание. Во время пуска не следует сильно нажимать на рукоятку 14, т.к. это может повлиять на точность замеряемой амплитуды. Поэтому каждый раз после разгона ротора за резонансное число оборотов нужно осторожным нажатием шток индикатора/ довести до контакта с кронштейном рамы.
3. Преподавателем задается вес добавочного груза Q3 и радиус установки гд. Вычисляется произведение Qд • rд. Добавочный груз QД закрепляется в прорези диска 3 на выбранном расстоянии rд. Три раза измеряется при резонансе амплитуда А2 колебаний рамы и вычисляется ее среднее значение:
![]()
Результаты заносятся в таблицу 2.
4. Освобождаются винты 5, диск 3 поворачивается на валу ротора на 180° и закрепляется. Снова измеряется три раза при резонансе амплитуда A3 и вычисляется ее среднее значение:
![]()
Результаты заносятся в таблицу 2.
По таблицам 5 бланка производится вычисление радиуса противовеса гп и угла п между нулевым диаметром и направлением радиуса-вектора гп (Qn — нужно задаться).
Рассчитанный противовес устанавливается в плоскости I-I (добавочный груз снимается) и производится контрольная балансировка. Она делается при четырех углах: +; —; 180° +; 180°— (так как при начальной установке добавочного груза не фиксируется его положение относительно нуля).
Окончательным углом установки противовеса считается тот, при котором остаточная амплитуда Ак имеет минимальную величину. Она измеряется три раза, и определяется ее среднее значение
![]()
Затем определяют относительную величину остаточной неуравновешенности
![]()
Результаты заносятся в таблицу 3.
7. Уравновешивание в плоскости II—II проводится аналогично. Для этого необходимо плоскости I—I и II—II поменять местами, т. е. ротор раскрепляется в подшипниках.
В отчете следует представить:
Теоретическую часть.
Схему баланбировочного станка с балансируемым ротором.
Таблицу 1 для определения максимальной амплитуды колебаний при резонансе от собственной неуравновешенности ротора (A1) и добавочными грузами (А2 и А3).
Таблицу 2 вычисления веса первого противовеса QI и его положение (rI и I).
Таблицу 3 контрольной балансировки.
Таблицы 1, 2, 3 с вычислениями веса второго противовеса QПII и его положение (rПII и ПII).
Выводы.
Таблица 1.
Амплитуда |
Измерения |
Вес и радиус положения добавочного груза |
|||
№1 |
№2 |
№3 |
Среднее |
||
А1 А2 А3 |
|
|
|
|
|
Таблица 2.
№ п/п |
Вычисляемые величины и формулы для вычислений |
Результат |
1.
2.
3
4
5
6
7
8
9
|
|
|
Таблица 3
Амплитуда |
Измерения |
|
|||
№1 |
№2 |
№3 |
Среднее |
||
А() A(-) A(+180) A(--180) |
|
|
|
|
|