

МУ к лабораторным работам по исследованию эксплуатационных свойств автомобиля в дорожных условиях
.pdfРис. 1.8 Основное меню, используемое при работе с базой данных
3.3Открыть необходимый файл базы данных, используя соответствующую опцию (рис. 1.8).
3.4В окне «№ испытания» (рис.1.8) выбрать нужное испытание.
3.5Загрузить испытания из базы данных, используя соответствующую опцию (рис. 1.8).
3.6В случае необходимости выполнить дополнительные операции с базами данных, используя опции основного меню (рис. 1.8).
4 Настройка аналоговых сигналов тензометрических каналов.
4.1В главном меню прикладной программы «hadi» открыть пиктограмму “Настройка аналоговых параметров” (рис.1.7).
4.2В появившемся меню «установки аналоговых параметров» выбрать условное обозначение настраиваемого сигнала, название которого отображается в нижней части окна, а текущие характеристики в правой части окна (рис. 1.9).
Рис. 1.9 Дополнительное меню настройки аналоговых параметров

4.3 При помощи тарировочных устройств (образцового манометра и точных мер весов) определить необходимые значения коэффициентов преобразования тензодатчиков.
4.4 С клавиатуры компьютера ввести новое значение коэффициента преобразования тензодатчика и нажать “Enter”.
5 Настройка сетевой связи и частотных измерительных каналов
5.1При отсутствии связи между контроллером и компьютером или в случае настройки частотных измерительных каналов активировать опцию "настройка связи и частотных каналов" главного меню (рис. 1.7).
5.2В появившемся дополнительном меню (рис. 1.10) для настройки номера сетевого адаптера Ethernet (LAN) в окне “Адаптер №”, необходимо ввести путем подбора (из диапазона цифр от 1 до 10) цифровое значение, при котором связь возобновляется. Наличие связи можно контролировать по сообщению на информационном табло или по окну “Контроль сети” (рис.1.7). Подобранное значение запомнить, нажав кнопку “Сохранить”.
Рис.1.10 Дополнительное меню для настройки номера сетевого адаптера и частотных измерительных каналов ускорения
5.3Для настройки частотных измерительных каналов: ускорения, расхода топлива, пройденного пути, - выбрать в дополнительном меню условное обозначение настраиваемого сигнала (рис.1.10), название которых приводится на схеме измерительных каналов (рис.1.1).
5.4В процессе настройки электронный датчик ускорения установить в строго вертикальном положении, при котором действует ускорение 1g.
5.5Нажать кнопку с изображением калькулятора для автоматизированного расчета калибровочного коэффициента. Нажать кнопку “Ok” (рис.110).
5.6Повторить те же действия для положения - g.
5.7Аналогичные действия провести для всех акселерометров.
5.8Для настройки канала пройденного пути выехать на мерный участок длиной не менее 200 м.
5.9Включить аппаратуру и записать прохождение мерного участка.
5.10Просмотреть измерения, в случае несоответствия измеренного пути мерному участку более чем на 1% с клавиатуры компьютера ввести новое значение радиуса колеса
(рис. 1.11) и нажать “Enter”.

Рис. 1.11 Настройка измерительного канала пройденного пути
5.11 Для настройки измерительного канала расхода топлива вместо топливного бака подключить мерную емкость.
5.12Запустить двигатель, включить аппаратуру и записать расход топлива из мерной емкости.
5.13В случае несоответствия измеренного расхода топлива объему мерной емкости более чем на 1% с клавиатуры компьютера ввести новое значение количества импульсов, соответствующих прохождению через датчик одного литра топлива (рис. 1.12), и нажать
“Enter”.
Рис. 1.12 Настройка измерительного канала расхода топлива
Контрольные вопросы
1.Назначение и устройство ходовой лаборатории.
2.Какие функции выполняют бортовой контроллер и переносной компьютер ходовой лаборатории?
3.Перечислите датчики, используемые на ходовой лаборатории, для измерения эксплуатационных свойств автомобиля.
4.Назначение и устройство прибора «пятое колесо».
Лабораторная работа № 2 Определение эффективности рабочей тормозной системы автомобиля
Цель и задачи работы
Цель работы – приобрести умения и навыки проведения тормозных испытаний автомобиля.
Задачи:
-ознакомиться с методикой испытаний рабочей тормозной системы автомобиля;
-выполнить измерения тормозного пути и установившегося замедления автомобиля;
-установить зависимости изменений тормозного пути и времени торможения от начальной скорости автомобиля.
Критерии оценки эффективности рабочей тормозной системы
В соответствии с существующими требованиями [1] критериями оценки эффективности рабочей тормозной системы при дорожных испытаниях АТС категорий М и N (пассажирские и грузовые автомобили) являются тормозной путь и установившееся замедление. Тормозной путь – это расстояние, которое автомобиль проходит от начала до конца торможения, то есть от момента касания водителем педали тормоза до момента остановки автомобиля. Установившееся замедление – это средняя величина замедления автомобиля за время установившейся фазы торможения, то есть от момента прекращения роста замедления автомобиля до конца торможения [2,3].
Методы испытаний по определению тормозных свойств АТС серийного и массового производства и опытных образцов устанавливаются действующим отраслевым стандартом ОСТ 37.001.067-86 [4].Согласно этому стандарту тормозной путь и установившееся замедление автомобиля должны определяться по тормозной диаграмме. Тормозная диаграмма отображает функцию замедления автомобиля на интервале времени от начала до конца торможения (рис. 2.1).
Время запаздывания торможения – это интервал времени от начала торможения до момента, когда появляется замедление автомобиля. Время нарастания замедления – это интервал времени от момента, когда появляется замедление автомобиля под действием тормозных сил до момента, в который замедление становится постоянным. Время установившегося торможения – это интервал времени, на котором замедление автомобиля постоянно.

Рис. 2.1 Тормозная диаграмма:
tзап - время запаздывания торможения; tнар - время нарастания замедления; tуст - время установившегося замедления; jуст - установившееся замедление
Способы оценки эффективности рабочей тормозной системы
Ходовая лаборатория кафедры автомобилей ХНАДУ позволяет оценить эффективность тормозной системы автомобиля двумя различными способами – с помощью прибора «пятое колесо» и посредством измерения замедления автомобиля электронным датчиком ускорения.
При использовании прибора «пятое колесо» тормозной путь автомобиля определяется компьютером непосредственно путем подсчета импульсов от датчика оборотов колеса. Один импульс датчика соответствует 0,026м пройденного пути.
В случае использования датчика ускорения тормозной путь определяется расчетным путем автоматически согласно математической модели:
ST |
=( |
+ 0,5 |
tнар |
) V + |
|
V2 |
(м). |
(2.1) |
|
|
|
||||||||
tзап |
|
|
|
2 |
jуст |
|
|
||
|
|
|
|
|
|
|
|
||
где tзап - время запаздывания |
торможения, |
с; |
tнар - время |
нарастания |
|||||
замедления, с; V- начальная скорость автомобиля, м/с; jуст - установившееся замедление, м/с2.
Условия испытания
Испытания по определению эффективности рабочей тормозной системы разделяют на три типа: испытания «ноль», испытания І, испытания ІІ. Данная лабораторная работа предусматривает проведение испытаний по типу «ноль», когда температура тормозных механизмов не превышает 100о С.
Участок дороги, на котором проводятся испытания, должен быть прямым и горизонтальным. Допускаются продольные уклоны, не превышающие 0,5%. Покрытие дороги должно быть твердым и сухим, и достаточным для обеспечения высокого коэффициента сцепления колеса с дорогой (φ≥0,7).
Испытания должны проводиться при температуре от +5 до +30оС и скорости ветра не более 5 м/с.
При контрольных торможениях не допускается доводить до блокирования колеса АТС. Результаты испытаний по определению эффективности торможения считаются незачетными, если АТС в процессе торможения поворачивается на угол свыше 15о. При этом не допускается корректировка траектории движения автомобиля рулевым управлением, если этого не требует безопасность испытаний.
Погрешности измерений
Согласно ОСТ 37.001. 067-86 погрешность измерения не должна превышать при определении тормозного пути ±1,5%, начальной скорости торможения ±1,5%, замедления
±4,0% [4].
Ходовая лаборатория ХНАДУ обеспечивает измерение выше перечисленных параметров при следующих погрешностях.
Измерение времени.
Погрешность измерения интервалов времени составляет 0,1% от измеренной величины. Эта погрешность обусловлена нестабильностью частоты задающего генератора контроллера (процессора нижнего уровня) и учитывается при расчете погрешностей определяемых величин.
Измерение пути.
Погрешность определяется двумя характеристиками: погрешностью метода и средств измерений.
Выбранный метод измерения основывается на подсчете количества зубьев, которые прошли мимо датчика импульсов. За один оборот зубчатого колеса, что эквивалентно одному обороту «пятого колеса», проходит 60 зубьев. Динамический радиус колеса составляет 0,249 м. За один оборот колесо проходит путь 1,564 м. За один зуб путь колеса составляет 0,026 м. Из этого следует, что при выбранном методе точнее, чем ±0,026 м пройденный путь измерить невозможно.
К характеристике метода также относится округление результатов измерения. При выбранном округлении до 0,1 м погрешность составляет ±0,05м.
–Погрешность подсчета импульсов ±1 импульс соответствует ±0,026 м;
–Погрешность, связанная с неточностью изготовления механической части устройства «пятого колеса»: вызвана наличием допустимого люфта и отклонениями в геометрии зубьев колеса. Это сказывается при скоростях движения автомобиля менее 1,5 м/с, когда слабо генерируемые импульсы не учитываются. Кроме того, в пределах малых скоростей при наложении вибрации наблюдается нечеткое прохождение кромки зуба мимо датчика, так называемое явление дробления импульса.
Если допустить, что погрешность измерения на участке движения со скоростью менее
1,5 м/с составляет 100%, то эта составляющая погрешности составит ±0,225 м. Дополнительно учитывается погрешность, обусловленная неровностью дороги,
непостоянством касания колеса с дорогой, изменениями радиуса колеса. При выполненных испытаниях на мерном участке длинной 200 м максимальное значение этой погрешности не превышает 1% пройденного пути.

С учетом всего выше сказанного величина абсолютной погрешности, независящая от пройденного пути, составит: ∆ = 0,0262 +0,052 +0,0262 +0,2252 = 0,23м.
Величина относительной погрешности, зависящей от пройденного пути:
σ = 0,12 +12 =1,05% .
Результирующая абсолютная погрешность от всего пройденного пути составит в
метрах: |
|
S |
|
|
|
|
|
∆R =σ |
|
+∆ = 0,0105 S +0,23 |
(2.2) |
||
|
|
|
||||
|
100 |
|
|
|
||
Результирующая относительная погрешность от всего пройденного пути |
|
|||||
σR = |
∆R 100 = (0,0105 + |
0,23 |
)100% |
(2.3) |
||
|
||||||
|
S |
|
S |
|
||
Измерение скорости.
Метод измерения основывается на заполнении промежутка между импульсами датчика импульсами стандартной частоты f=8 МГц. Погрешность такого метода измерения при длине участка пути lz=0,026 м, который эквивалентен расстоянию между двумя
импульсами датчика, составит: σ = |
Va |
|
100% . |
||||
lZ |
f |
||||||
|
|
|
|
|
|||
При максимальной |
скорости |
|
25 м/с относительная погрешность метода |
||||
составит:σ = |
|
25 |
=1,2 10−2% . |
|
|||
26 |
10−3 8 106 |
|
|||||
|
|
|
|
|
|||
При выбранном округлении до 0,1 м/с погрешность составляет ±0,05 м/с.
По аналогии с определением погрешности пройденного пути от неровности дороги, непостоянства касания колеса с дорогой, изменения радиуса колеса аналогичная погрешность, равная 1% от величины скорости будет присутствовать при измерении скорости.
Относительная погрешность от измеренной скорости составит:
σ = 0,0122 +0,12 +12 = 11025 10−2 =1% .
Абсолютная погрешность измерения скорости равняется:
∆V =σ |
|
Va |
+∆ = 0,01 Va +0,05 |
(2,4) |
|
100 |
|||||
|
|
|
|||
Данная погрешность справедлива при скоростях превышающих 1,5 м/с.
Измерение замедления при использовании прибора «пятое колесо».
Поскольку величина ускорения определяется аналитически по формуле:
a = Vt+∆t −Vt , то предельное значение относительной погрешности будет равняться
∆ t
сумме погрешностей всех трех участвующих в расчете величин (времени, начальной скорости, конечной скорости): σ =1+1+0,1 = 2,1% .
Данная погрешность справедлива при скоростях превышающих 1,5 м/с.
Измерение ускорения (замедления) от электронных датчиков.
Составляющие погрешности датчика ADXL210:
Нелинейность 0,2%; температурный дрейф ±0,03% на 1С; дрейф нуля ±0,02% на 1С.
Если принять во внимание, что рабочая температура откланяется от температуры 10 град. С, при которой проходила тарировка канала, на величину не превышающую ±20 С., то
относительная погрешность составит: σ = 0,22 +0,62 +0,42 = 0,75% .
Абсолютная погрешность при использовании датчика ADXL210 где аmax=10g м/с2:
∆a = a |
|
|
σ |
= 0,73м/ с2 . |
|
max |
|
||||
|
100 |
|
|
||
|
Составляющие погрешности датчика ADXL202: нелинейность 0,2%; температурный |
||||
дрейф ±0,03% на 1С; дрейф нуля ±0,04% на 1С. |
|||||
|
Относительная |
погрешность измерения с помощью датчика составит: |
|||
σ = 0,22 +0,62 +0,82 |
=1,02% . |
||||
Абсолютная погрешность при использовании датчика ADXL202 где аmax=2g м/с2:
∆a = amax 100σ = 0,2м/ с2 .
Требования техники безопасности при проведении дорожных тормозных испытаний
Дорожные испытания тормозных систем автомобилей являются разновидностью испытаний, которые отличаются повышенной опасностью. Поэтому во время испытаний (контрольных торможений) экипаж должен надеть защитные шлемы и быть пристегнут ремнями безопасности, а на автомобиле должен быть включен дальний свет фар [4].
Автомобиль, участвующий в испытаниях, должен быть технически исправен, а также иметь предупредительные надписи «Тормозные испытания».
Испытания могут проводиться как на дорогах общего пользования, так и на автополигонах. При проведении испытаний на дорогах общего пользования органы ГАИ должны быть своевременно поставлены в известность о месте и времени проведения испытаний.
Методические указания к проведению испытания
1.Выехать на испытательный участок, остановить автомобиль, перевести (опустить) прибор «пятое колесо» в рабочее положение.
2. Выполнить требования техники безопасности:
-участники испытаний, которые не могут быть пристегнуты ремнями безопасности и не имеют защитных шлемов, должны покинуть автомобиль;
-на автомобиле включить дальний свет фар;
-убедиться, чтобы в непосредственной близости от испытательного участка не находятся посторонние люди, автомобили или предметы.
3. Включить аппаратуру на режим записи.
4.Разогнать автомобиль до скорости, на 3-5 км/ч превышающей заданную начальную скорость торможения и выключив передачу пустить автомобиль накатом.
5.При достижении автомобилем заданной скорости произвести торможение.
6.Совершить не менее 4-х контрольных торможений – по два торможения при движении в обоих направлениях испытательного участка дороги.
7.Остановить автомобиль и закончить испытания.
8.Подсоединить к бортовому контроллеру переносной компьютер и считать полученные измерения.
9.Перенести результаты измерений в электронном виде в класс систем автоматизированного проектирования.
10.Запустив прикладную программу «hadi» вызвать из базы данных результаты испытаний (в соответствии с методическими рекомендациями, приведенными в лабораторной работе №1).
11.В главном меню прикладной программы «hadi» активизировать пиктограмму “Работа с графиками” (рис.1.7).
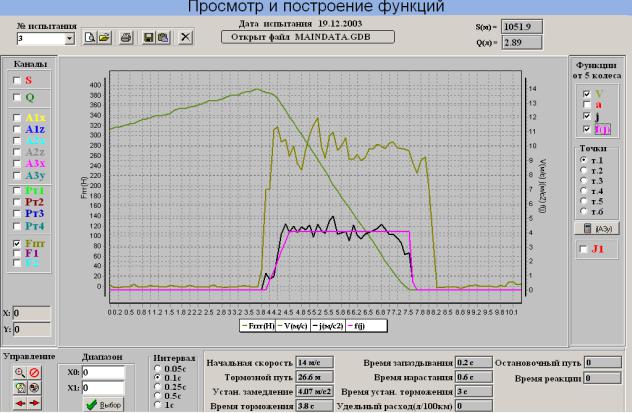
12В меню «каналы» (слева от поля графиков рис.2.2) отметьте окно с символикой, соответствующей измеряемой величине: S – пройденный путь;
Fпт – усилие на тормозной педали.
13.При построении графиков производных от пройденного пути используйте меню «функции от 5 колеса» (справа от поля графиков рис.2.2):
V– скорость; а – ускорение; j – замедление.
14.Для построения тормозной диаграммы в автоматизированном режиме на поле графика выделите участок замедления, соответствующий началу и окончанию торможения, и отметить в меню «функции от 5 колеса» окно f(j) (рис. 2.2).
Рис.2.2 Графическое отображение результатов испытаний по оценке тормозной эффективности автомобиля
15.Распечатать результаты испытаний, используя опцию основного меню «вывод на печать результатов испытаний» (рис. 1.8).
16.Занести в протокол испытаний, оформленный в виде таблицы (табл.2.1), величины начальной скорости торможения V, тормозного пути S,
установившегося торможения jуст и усилия F на педали тормоза, времени запаздывания торможения tзап и времени нарастания замедления tнар.
17.Используя выражения (2.1) произвести расчет тормозного пути Sт и полученное значение занести в последнюю колонку таблицы (табл.2.1).
|
|
Результаты испытаний |
|
Таблица 2.1 |
|||
|
|
|
|
|
|||
V, м/с |
S, м |
jуст, м/с2 |
F, Н |
tзап, с |
tнар, с |
|
Sт, м |
|
|
|
|
|
|
|
|
18. Сравнить измеренный S и расчетный Sт тормозной путь, используя формулу относительной погрешности:
γ = |
| S − ST | |
100% |
(2.5) |
|
S |
||||
|
|
|
Контрольные вопросы
1.Какими показателями оценивается эффективность рабочей тормозной системы автомобиля?
2.Что понимается под тормозной диаграммой и как она строится?
3.Как влияет начальная скорость торможения на показатели эффективности торможения?
4.Условия и требования техники безопасности при проведении тормозных испытаний.
5.Погрешность выполненных измерений.
Лабораторная работа № 3 Испытания по определению скоростных свойств автомобиля
Цель и задачи работы
Цель работы – освоить методику экспериментального определения скоростных свойств автомобиля.
Задачи: