

16. Переходная и весовая функции
Переходная функция
Для получения переходной функции в качестве стандартного сигнала используется единичная функция времени (1.10). Такого рода воздействию соответствует, например, сброс или включение нагрузки в системах регулирования (отказ мотора в системе регулирования).
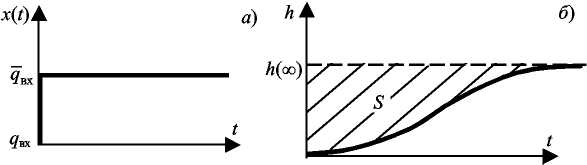
Рис. 2.4 Переходная характеристика:
а - ступенчатое воздействие; б - кривая разгона
Переходной функцией называется аналитическое выражение для решения линейного дифференциального уравнения (2.2) при входном сигнале x(t) = 1(t) и нулевых начальных условиях, т.е.
 (2.6)
(2.6)
Кривой разгона называется реакция объекта (системы) на единичное ступенчатое воздействие при нулевых начальных условиях.
На практике кривая разгона определяется экспериментальным путем и используется в качестве исходных данных для анализа и синтеза систем автоматического управления исследуемом объектом. Здесь следует ввести понятия прямой и обратной задач. Прямая задача (задача Коши) заключается в определении решения дифференциального уравнения с заданными начальными условиями. В обратной задаче требуется восстановить вид и коэффициенты дифференциального уравнения по известной интегральной кривой, например, переходной функции. Если предположить, что переходная функция описывается решением уравнения первого порядка
![]()
где
![]() ,
то определению подлежат k
- коэффициент
усиления и Т
- постоянная времени.
,
то определению подлежат k
- коэффициент
усиления и Т
- постоянная времени.
В статике у'(t)
= 0 и, следовательно,
у(∞)
= k x(∞),
откуда коэффициент усиления
![]() так как x(∞)
= 1; y(∞)
= h(∞),
то k
= h(∞).
так как x(∞)
= 1; y(∞)
= h(∞),
то k
= h(∞).
Для определения постоянной времени Т исходное уравнение интегрируется в пределах от 0 до ∞:

Правая часть
последнего выражения есть не что иное,
как площадь S
под
экспериментально снятой с
кривой
разгона (рис. 2.4б), тогда можно записать:
Th(∞)
= S,
откуда
![]()
Весовая функция
Для получения весовой функции, ее также называют импульсной переходной функцией, в качестве стандартного сигнала используется δ-функция (1.11):

Таким образом, весовой функцией w(t) называется реакция системы на δ-функцию при нулевых начальных условиях.
На практике весовую функцию в отдельных случаях можно получить экспериментальным путем весьма приближенно (рис. 2.5). Считают, что на вход объекта подана δ-функция, если время действия импульса намного меньше времени переходного процесса.
Подаваемый на вход импульс представляет собой приближенную дельта-функцию, так как его площадь отлична от единицы и равна S. Поэтому для получения весовой функции экспериментально снятый переходный процесс нормируют путем деления его ординат на величину площади входного воздействия S.
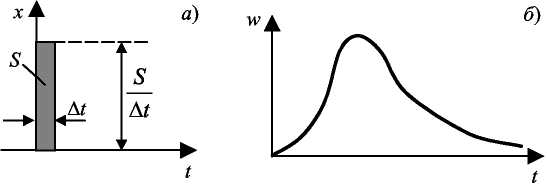
Рис. 2.5 Переходная характеристика:
а - δ-функция; б - весовая функция
Между временными характеристиками: переходной и весовой функциями существует взаимное однозначное соответствие, которое определяется следующим образом:
Весовую функцию можно получить и как решение дифференциального уравнения
![]()
![]()
17. Передаточная функция
Одной из основных характеристик объекта управления, используемой в теории автоматического управления, является передаточная функция, записываемая в терминах преобразования Лапласа.
Передаточной функцией объекта называется отношение преобразованного по Лапласу выхода объекта у(s) к преобразованному по Лапласу входу х(s) при нулевых начальных условиях.
Передаточная функция определяется только внутренними свойствами системы, является функцией комплексного переменного и обозначается:
![]() (2.9)
(2.9)
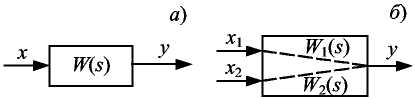
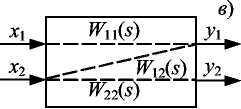
Рис. 2.6 Примеры различных объектов:
а — с одним входом и одним выходом; б — двумя входами и одним выходом;
в - двумя входами и двумя выходами
Передаточная функция характеризует динамику объекта только по определенному каналу, связывающему конкретный вход объекта и конкретный выход (рис. 2.6).
Если объект имеет несколько входов и выходов, то он характеризуется несколькими передаточными функциями, определить которые можно непосредственно, пользуясь определением (2.9).
Как и дифференциальное
уравнение, передаточная функция полностью
характеризует динамику линейного
объекта. Если задано дифференциальное
уравнение объекта, то для получения
передаточной функции необходимо
преобразовать дифференциальное уравнение
по Лапласу и из полученного алгебраического
уравнения найти отношение
![]()
В общем случае дифференциальное уравнение объекта представляется в виде
![]()
![]() (2.10)
(2.10)
где an,…, a0; bm, …, b0 — постоянные коэффициенты.
После преобразования по Лапласу при нулевых начальных условиях получают:
ansny(s) + an−1sn-1(s)+ ... + a1sy(s) + a0y(s) = bmsmx(s) + bm−1sm-1(s)+ ... +b1sx(s) + b0x(s), или
(ansn + an-1sn-1 + ... + a1s + a0) y(s) = (bmsm + bm-1sm-1 + ... + b1s + b0) x(s), и тогда
![]()
Если известна передаточная функция объекта, то изображение выхода объекта у(s) равно произведению передаточной функции на изображение входа x(s):
y(s) = W(s)x(s). (2.11)
Последняя запись есть не что иное, как общая форма записи решения дифференциального уравнения в операторной форме.
Таким образом, передаточная функция равна отношению двух полиномов:
![]()
где B(s) = bmsm + bm-1sm-1 ... + b1s + b0; A(s) = ansn + an-1sn-1 + a1s + a0 .
Для реальных физических объектов можно отметить как характерную особенность тот факт, что степень полинома В(s) всегда меньше или равна степени полинома A(s), т.е. m ≤ n, так что
![]()
Передаточная функция также взаимно однозначно связана с временными характеристиками.
Если имеется
выражение для переходной функции,
следовательно, входной сигнал x(t)
= 1(t)
или
![]() ,
выходной сигнал y(t)
= h(t)
или y(s)
= h(s),
и тогда
передаточная функция равна
,
выходной сигнал y(t)
= h(t)
или y(s)
= h(s),
и тогда
передаточная функция равна
![]() (2.12)
(2.12)
Из (2.12) может быть получено выражение для переходной функции через преобразование Лапласа:
![]() (2.13)
(2.13)
Если известно выражение для весовой функции, то входной сигнал x(t) = δ(t) или x(s) = 1, выходной сигнал w(t) и, следовательно,
![]() (2.14)
(2.14)
т.е. передаточная функция есть не что иное, как преобразование Лапласа от весовой функции.