

Вопрос 55. Что характеризуют параметры динамической системы k и t?
Если на выходе будет наблюдаться экспоненциальный сигнал, то система будет называться системой первого порядка (или звеном первого порядка). Для ее описания достаточно одной производной (а в решении модели будет присутствовать один интеграл):
![]()
У такой системы два параметра — T и k.
T характеризует инерционность системы (память). При малой величине T система слабо зависит от предыстории и вход мгновенно заставляет измениться выход. При большом значении T система медленно реагирует на входной сигнал, а при очень большом значении T система выдает неизменный выходной сигнал, практически не реагируя на входные воздействия.
Коэффициент k характеризует способность системы к усилению (при k < 1 — к ослаблению) уровня входного сигнала. Чтобы определить коэффициент k на графике, достаточно дождаться успокоения сигнала на выходе системы и вычислить отношение уровня выходного сигнала к уровню входного. Математически это означает, что все слагаемые, содержащие производные, равны нулю (система успокоилась, движения нет), а оставшееся слагаемое Y = k · X определяет значение k.
56.Передаточная функция звена первого порядка.
Звено первого порядка обладает двумя параметрами: инерционностью T и коэффициентом усиления k = Y(t = ∞)/X.
Чем больше производных учитывается в записи модели, тем со звеном большего порядка мы имеем дело, тем больше коэффициентов при производных следует определить.
Введем понятие передаточной функции как модели динамической системы. По определению передаточная функция — это отношение выхода ко входу:
W = Y/X.
Передаточная функция звена первого порядка имеет вид:
W = k/(Tp + 1),
где «p» — символ дифференцирования, тождественно равный «d/dt». Символ «p» также называется алгебраизованным оператором дифференцирования. Тогда, используя определение передаточной функции, имеем:
Y/X = k/(Tp + 1).
Далее получим:
(Tp + 1) · Y = k · X
или
T · dY/dt + Y = k · X
или
T · ΔY/Δt + Y = k · X.
57.Передаточная функция звена второго порядка.
Одной из форм записи математического описания звена является запись с помощью передаточной функции.
Отношение оператора воздействия к собственному оператору называют передаточной функцией или передаточной функцией в операторной форме
 . (1.2)
. (1.2)
Наряду с передаточной функцией в операторной форме широко используют передаточную функцию в форме изображений Лапласа.
Передаточной функцией или передаточной функцией в форме изображений Лапласа называют отношение изображения выходной величины к изображению входной величины при нулевых начальных условиях.
Передаточную функцию в форме изображения
Лапласа можно получить из передаточной
функции в операторной форме, если в
последней сделать подстановку
![]() ,
где
,
где
![]() – комплексная величина
– комплексная величина
 ,(1.4)
,(1.4)
где
![]() – преобразования Лапласа.
– преобразования Лапласа.
Такое сходство рассмотренных выражений для передаточных функций справедливо только при нулевых начальных условиях.
Передаточная функция является дробно-рациональной функцией комплексной переменной:
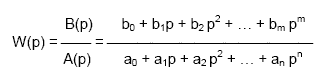
где:
![]()
Передаточная функция имеет порядок, который определяется порядком полинома знаменателя (n).
В теории автоматического управления вводится понятие типовых звеньев, передаточная функция которых только в определенном частотном диапазоне соответствует реальным звеньям систем управления. Рассматривая характеристики звеньев независимо от их назначения, физического принципа действия, мощности и скорости передаваемых сигналов, можно выделить ряд типовых звеньев, описываемых обыкновенными линейными дифференциальными уравнениями первого и второго порядков [3]:
1) простейшие: пропорциональные, интегрирующие и дифференцирующие звенья;
2) звенья первого порядка: инерционные, инерционно-дифференцирующие, форсирующие и инерционно-форсирующие;
3) звенья второго порядка: колебательные, консервативные, инерционные, форсирующие.
Колебательное звено второго порядка. Звено, которое можно описать уравнением
![]()
или в другой форме
![]() , (1.23)
, (1.23)
где
![]() ,
,
![]() ,
,
или передаточной функцией
![]() , (1.24)
, (1.24)
называют колебательным.