

- •ВВЕДЕНИЕ
- •1.1. Общие сведения по электрическим машинам
- •1.2. Классификация электрических машин
- •1.4. Принцип действия трансформатора
- •1.9. Принцип действия и устройство машины постоянного тока
- •2. ТРАНСФОРМАТОРЫ
- •2.1. Основные соотношения в трансформаторе
- •2.2. Виды трансформаторов и магнитопроводов
- •2.3. Типы и конструкция обмоток
- •2.4. Схемы и группы соединения трансформаторов
- •2.5. Расчет магнитной цепи, намагничивающий ток и ток холостого хода
- •2.6. Форма кривых намагничивающего тока и магнитного потока трансформатора
- •2.7. Уравнения напряжения и векторные диаграммы трансформатора
- •2.8. Схема замещения трансформатора
- •2.9. Опытное определение параметров схемы замещения
- •2.10. Энергетические диаграммы активной и реактивной мощностей трансформатора
- •2.11. Коэффициент полезного действия трансформатора. Зависимость КПД от нагрузки
- •2.12. Изменение вторичного напряжения при нагрузке. Внешняя характеристика трансформатора
- •2.13. Регулирование напряжения трансформатора
- •2.14. Параллельная работа трансформаторов
- •2.16. Включение ненагруженного трансформатора в сеть
- •2.17. Внезапное короткое замыкание
- •2.17. Перенапряжения в трансформаторах
- •3. РАЗНОВИДНОСТИ ТРАНСФОРМАТОРОВ
- •3.1. Автотрансформаторы
- •3.2. Трехобмоточный трансформатор
- •3.3. Измерительные трансформаторы тока и напряжения
- •3.4. Сварочные трансформаторы
- •3.5. Трансформаторы преобразовательных установок
- •4. ОБМОТКИ МАШИН ПЕРЕМЕННОГО ТОКА
- •4.2. Магнитодвижущие силы многофазных обмоток
- •4.3. Электродвижущие силы, индуцируемые в обмотках машин переменного тока
- •4.4. Схемы обмоток машин переменного тока
- •5. АСИНХРОННЫЕ МАШИНЫ
- •5.1. Асинхронная машина при неподвижном роторе
- •5.2. Фазорегуляторы и индукционные регуляторы напряжения
- •5.3. Работа асинхронной машины при вращающемся роторе
- •5.4. Схема замещения асинхронной машины
- •5.5. Расчет характеристик двигателей по схемам замещения
- •5.6. Механические характеристики
- •5.7. Влияние на механическую характеристику высших гармоник магнитного поля
- •5.8. Устойчивость работы асинхронного двигателя
- •5.9. Рабочие характеристики асинхронного двигателя
- •5.10. КПД и коэффициент мощности асинхронного двигателя
- •5.11. Пуск в ход трехфазных асинхронных двигателей
- •5.12. Короткозамкнутые асинхронные двигатели с повышенным пусковым моментом
- •5.14. Многоскоростные двигатели
- •5.15. Торможение двигателей
- •6. АСИНХРОННЫЕ МАШИНЫ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ
- •6.1. Асинхронный автономный генератор
- •6.2. Однофазные асинхронные двигатели
- •6.3. Двухфазные управляемые асинхронные двигатели автоматических устройств
- •6.4. Асинхронный тахогенератор
- •6.5. Сельсины
- •6.6. Вращающиеся трансформаторы
- •7. СИНХРОННЫЕ МАШИНЫ
- •7.2. Характеристика холостого хода
- •7.3. Работа синхронного генератора при симметричной нагрузке
- •7.4. Математическая модель электромагнитных процессов в синхронном генераторе
- •7.5. Векторные диаграммы синхронных генераторов
- •7.6. Характеристики синхронных генераторов
- •7.7. Потери мощности и КПД синхронного генератора
- •7.8. Параллельная работа синхронных машин
- •7.9. Мощность и электромагнитный момент
- •7.10. Статическая устойчивость
- •7.12. Качания синхронных машин
- •7.13. Синхронные двигатели
- •7.14. Внезапное короткое замыкание синхронной машины
- •7.15. Несимметричные режимы работы синхронных генераторов
- •8. СИНХРОННЫЕ МАШИНЫ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
- •8.1. Назначение и особенности рабочего режима
- •8.4. Синхронные гистерезисные двигатели
- •9. МАШИНЫ ПОСТОЯННОГО ТОКА
- •9.1. Магнитная цепь машины и метод ее расчета
- •9.2. Основные электромагнитные соотношения в машине постоянного тока
- •9.3. Магнитное поле машины постоянного тока
- •9.4. Напряжение между коллекторными пластинами и компенсационная обмотка
- •9.5. Коммутация
- •9.6. Потери мощности. Коэффициент полезного действия электрической машины
- •9.7. Генераторный режим работы машины
- •9.8. Параллельная работа генераторов постоянного тока
- •9.9. Двигательный режим работы машины
- •9.10. Пуск и реверсирование двигателей постоянного тока
- •9.11. Устойчивость работы двигателей
- •9.12. Двигатели параллельного возбуждения
- •9.13. Двигатели последовательного возбуждения
- •10. СПЕЦИАЛЬНЫЕ МАШИНЫ ПОСТОЯННОГО ТОКА
- •10.1. Исполнительные двигатели постоянного тока
- •10.2. Тахогенераторы
- •10.3. Бесконтактные двигатели постоянного тока
- •ЗАКЛЮЧЕНИЕ
- •БИБЛИОГРАФИЧЕСКИЙ СПИСОК
- •ОГЛАВЛЕНИЕ
5. Асинхронные машины
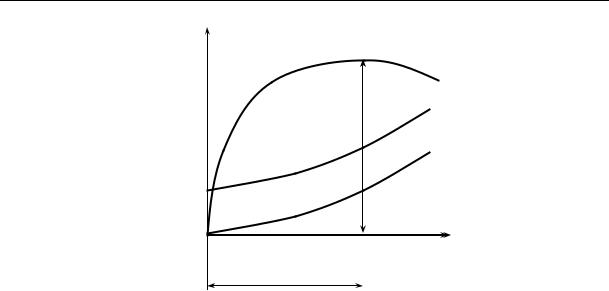
ности при увеличении полезной нагрузки P2 (рис. 5.24). Ток и потребляемая мощность при значении полезной мощности, равном нулю, отличны от нуля и определяются величиной тока и мощности холостого хода.
5.10. КПД и коэффициент мощности асинхронного двигателя
Коэффициент полезного действия электродвигателя
η =1− |
рΣ |
=1− |
рΣ |
|
|
, |
(5.115) |
|
Р + |
р |
|
||||
|
Р |
Σ |
|
||||
|
1 |
|
2 |
|
|
||
где p∑ – суммарные потери мощности; P1 – потребляемая асинхронным двигателем (его статорной обмоткой) активная электрическая мощность; P2 – полезная механическая мощность (снимаемая с вала двигателя).
КПД современных асинхронных двигателей при номинальной нагрузке для машин мощностью свыше 100 кВт составляет 0,92−0,96, мощностью 1−100 кВт – 0,7−0,9, а микромашин – 0,4−0,6 (большие значения относятся к машинам большей мощности).
Так же, как в трансформаторе, потери мощности асинхронного двигателя следует разделить на потери постоянные и переменные (или потери холостого хода и короткого замыкания). Постоянные потери не зависят от нагрузки. Это потери магнитные, механические, электрические холостого хода.
Магнитные потери определяются аналогично магнитным потерям трансформатора с помощью формулы Штейнметца:
р |
|
= k |
p |
B |
2 |
|
f |
1,3 |
G , |
(5.116) |
|
|
|
|
|
||||||
|
|
|
||||||||
|
мг |
|
d 1,0 / 50 |
|
|
50 |
|
с |
|
|
где p1,0/50 – удельные потери в стали на единицу массы при частоте 50 Гц и индукции 1,0 Тл; B – индукция на участке магнитопровода; Gc – масса
сердечника (магнитопровода) или его участка.
Частота перемагничивания в роторе f2 = f1s в рабочем режиме двигателя существенно меньше частоты магнитной индукции в статоре; масса магнитопровода ротора также меньше аналогичной массы статора. Обычно в практических расчетах асинхронных двигателей общепромышленного применения пренебрегают магнитными потерями в роторе.
Механические потери pмх состоят из потерь в подшипниках pподш, потерь на трение щеток о кольца pтр.щ (только для фазного ротора), вентиля-
220

5. Асинхронные машины
ционных потерь pвент, включающих в себя потери на трение частей машины о воздух и потери в крыльчатке вентилятора, установленной на валу машины:
рмх = рподш + рвент + ртр.щ . |
(5.117) |
Механические потери зависят только от частоты вращения и составляют не более 2 % от номинальной мощности машины. Поскольку частота вращения асинхронного двигателя при изменении нагрузки от нуля до номинальной изменяется мало, то механические потери считают постоянными.
В отличие от трансформатора в асинхронном двигателе учитывают электрические потери холостого хода, поскольку ток холостого хода в нем существенно больше, чем в трансформаторе, и составляет от 20 до 50 % от номинального тока (причины такого значения I0 объяснены в п. 5.1):
р |
эл0 |
= m r I 2 . |
(5.118) |
|
1 1 0 |
|
Таким образом, потери холостого хода
р0 = рмх + рмг + рэл0 . |
(5.119) |
К потерям переменным (короткого замыкания) относят электрические потери в обмотках статора и ротора:
рэл1 = m1r1I12; рэл2 = m1r2′(I2′)2 . |
(5.120) |
К переменным потерям относят и добавочные потери, вызванные различными причинами: неравномерностью зазора, технологическими погрешностями, вытеснением тока в проводниках обмотки, пульсациями магнитного потока и т. д. Обычно эти потери рассчитывают как определенный процент от номинальной мощности по формуле (5.73).
Итак, переменные потери, как следует из формул (5.120), (5.73), зависят от второй степени тока или второй степени коэффициента нагрузки kнг = I/Iн (отношения тока текущей нагрузки к номинальному его значению):
pк = pэл2 + pд = m1rк(I2′)2 +(I Iн )2 pд = kнг2 ркн, |
(5.121) |
где pкн – потери короткого замыкания при номинальном токе.
Таким образом, суммарные потери мощности можно представить в следующем виде:
pΣ = p0 + pк = p0 + kнг2 pкн . |
(5.122) |
221
5. Асинхронные машины
р,% |
|
η,% |
|
η |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
80 |
|
|
ηmax |
|
рΣ |
|||
|
|
|
|
||||||||
8 |
|
|
60 |
|
|
|
|||||
|
|
|
|
|
рк |
||||||
6 |
|
|
40 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
р0 |
|
|||
4 |
|
|
|
|
|
|
|
|
|||
|
|
20 |
|
|
|
|
|
|
kнг |
||
|
|
|
|
|
|
|
|||||
0 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
0,2 |
0,4 |
0,6 |
0,8 |
1,0 |
|
|
||||
|
|
|
|
||||||||
|
|
|
|
|
Iкр |
|
|
|
|
|
|
Рис. 5.23. Зависимость КПД двигателя и его потерь от коэффициента нагрузки
Формулу (5.115) запишем с учетом выражения (5.122):
|
|
|
р |
+ k 2 |
р |
|
|
|
|
η =1− |
|
|
0 |
нг |
кн |
|
|
. |
(5.123) |
k |
нг |
Р + р + k 2 |
р |
|
|||||
|
|
2 |
0 |
нг |
|
кн |
|
||
Характер зависимости КПД от коэффициента нагрузки такой же, как
иу трансформатора. При увеличении нагрузки КПД возрастает за счет уве-
личения Р2, но одновременно быстрее, чем Р2, возрастают переменные потери рк, поэтому при некотором токе Iкр рост КПД прекращается и в дальнейшем начинает уменьшаться (рис. 5.23). Если исследовать функцию
(5.123) на экстремум (взять производную dη/dkнг и приравнять ее к нулю), то получим условие максимума КПД: он наступает при равенстве переменных
ипостоянных потерь рк = р0. При проектировании электрической машины стремятся так распределить потери мощности, чтобы указанное условие выполнялось при наиболее вероятной нагрузке машины, несколько мень-
шей номинальной. Во вращающихся электрических машинах средней и большой мощности это условие выполняется при нагрузках 60−80 % от номинальной (коэффициент нагрузки kнг = 0,6−0,8). На рис. 5.23 приведены зависимости изменения КПД и потерь мощности от коэффициента нагрузки.
Коэффициент мощности асинхронной машины определяют как отношение активного тока к полному току или активной потребляемой мощности к полной мощности по выражению
|
I |
P1 |
|
P1 |
|
|
|
cos ϕ = |
1а |
= |
|
= |
|
. |
(4.53) |
|
|
|
|||||
1 |
I1 |
S |
|
m1U1I1 |
|
|
|
|
|
|
|
||||
222

|
|
|
|
|
|
|
|
|
5. Асинхронные машины |
||||
cosϕ |
|
|
|
|
|
I2′ |
cosψ2 |
|
|
||||
1,0 |
|
|
|
cosϕ |
|
|
|||||||
|
|
|
1,0 |
|
|
|
|
I2′ |
|||||
|
|
|
|
|
|
|
|||||||
0,8 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
0,6 |
|
|
|
|
|
0,5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0,4 |
|
|
|
|
|
|
|
I2′а |
cosψ2 |
||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||
0,2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
kнг |
|
|
|
|
s |
||||
|
|
|
|
|
|
|
|
||||||
0 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
0 |
|
|
|
|
|||||
|
|
|
|
|
0,5 |
1,0 |
|||||||
0,5 |
1,0 |
||||||||||||
|
|||||||||||||
|
|
Рис. 5.24. Характеристика |
|
|
|
Рис. 5.25. Зависимости тока |
|||||||
|
|
коэффициента мощности |
|
|
|
роторной обмотки и cosψ2 |
|||||||
от скольжения
Асинхронный двигатель, так же как и трансформатор, независимо от нагрузки потребляет из сети отстающий ток, поэтому его cos φ1 всегда меньше единицы.
При холостом ходе асинхронного двигателя коэффициент мощности мал и составляет cos φ0 = 0,08−0,15 (рис. 5.24). Это объясняется малой величиной активной составляющей тока, идущего на покрытие лишь достаточно небольших потерь активной мощности. В то же время реактивная составляющая тока холостого хода сравнительно велика, поскольку потребляется двигателем для создания основного магнитного потока, практически не зависящего от нагрузки. При увеличении нагрузки cos φ1 сначала довольно быстро растет при увеличении момента на валу, затем рост его замедляется и достигает максимума при мощности, близкой к номинальной (рис. 5.24). Но при увеличении момента уменьшается частота вращения и растет скольжение. При этом увеличивается частота тока в роторе f2 = f1s, его индуктивное сопротивление. Снижается и cos φ1, как правило, при нагрузках, выше номинальных.
Вследствие массового использования асинхронных двигателей для рационального электроснабжения предприятий следует так организовывать технологический процесс, чтобы асинхронные двигатели были загружены в соответствии сихноминальной мощностью инеработали нахолостомходу.
Величина коэффициента мощности для двигателей с короткозамкнутым ротором мощностью до 100 кВт достигает 0,7−0,9, а для двигателей свыше 100 кВт cos φ1 = 0,9−0,95. В двигателях с фазным ротором cos φ1 и КПД несколько ниже, что объясняется дополнительными потерями на трение щеток, худшим использованием объема ротора из-за наличия изоляции в его пазах и увеличением намагничивающего тока в результате уменьшения сечения зубцов ротора.
223