

- •ВВЕДЕНИЕ
- •1.1. Общие сведения по электрическим машинам
- •1.2. Классификация электрических машин
- •1.4. Принцип действия трансформатора
- •1.9. Принцип действия и устройство машины постоянного тока
- •2. ТРАНСФОРМАТОРЫ
- •2.1. Основные соотношения в трансформаторе
- •2.2. Виды трансформаторов и магнитопроводов
- •2.3. Типы и конструкция обмоток
- •2.4. Схемы и группы соединения трансформаторов
- •2.5. Расчет магнитной цепи, намагничивающий ток и ток холостого хода
- •2.6. Форма кривых намагничивающего тока и магнитного потока трансформатора
- •2.7. Уравнения напряжения и векторные диаграммы трансформатора
- •2.8. Схема замещения трансформатора
- •2.9. Опытное определение параметров схемы замещения
- •2.10. Энергетические диаграммы активной и реактивной мощностей трансформатора
- •2.11. Коэффициент полезного действия трансформатора. Зависимость КПД от нагрузки
- •2.12. Изменение вторичного напряжения при нагрузке. Внешняя характеристика трансформатора
- •2.13. Регулирование напряжения трансформатора
- •2.14. Параллельная работа трансформаторов
- •2.16. Включение ненагруженного трансформатора в сеть
- •2.17. Внезапное короткое замыкание
- •2.17. Перенапряжения в трансформаторах
- •3. РАЗНОВИДНОСТИ ТРАНСФОРМАТОРОВ
- •3.1. Автотрансформаторы
- •3.2. Трехобмоточный трансформатор
- •3.3. Измерительные трансформаторы тока и напряжения
- •3.4. Сварочные трансформаторы
- •3.5. Трансформаторы преобразовательных установок
- •4. ОБМОТКИ МАШИН ПЕРЕМЕННОГО ТОКА
- •4.2. Магнитодвижущие силы многофазных обмоток
- •4.3. Электродвижущие силы, индуцируемые в обмотках машин переменного тока
- •4.4. Схемы обмоток машин переменного тока
- •5. АСИНХРОННЫЕ МАШИНЫ
- •5.1. Асинхронная машина при неподвижном роторе
- •5.2. Фазорегуляторы и индукционные регуляторы напряжения
- •5.3. Работа асинхронной машины при вращающемся роторе
- •5.4. Схема замещения асинхронной машины
- •5.5. Расчет характеристик двигателей по схемам замещения
- •5.6. Механические характеристики
- •5.7. Влияние на механическую характеристику высших гармоник магнитного поля
- •5.8. Устойчивость работы асинхронного двигателя
- •5.9. Рабочие характеристики асинхронного двигателя
- •5.10. КПД и коэффициент мощности асинхронного двигателя
- •5.11. Пуск в ход трехфазных асинхронных двигателей
- •5.12. Короткозамкнутые асинхронные двигатели с повышенным пусковым моментом
- •5.14. Многоскоростные двигатели
- •5.15. Торможение двигателей
- •6. АСИНХРОННЫЕ МАШИНЫ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ
- •6.1. Асинхронный автономный генератор
- •6.2. Однофазные асинхронные двигатели
- •6.3. Двухфазные управляемые асинхронные двигатели автоматических устройств
- •6.4. Асинхронный тахогенератор
- •6.5. Сельсины
- •6.6. Вращающиеся трансформаторы
- •7. СИНХРОННЫЕ МАШИНЫ
- •7.2. Характеристика холостого хода
- •7.3. Работа синхронного генератора при симметричной нагрузке
- •7.4. Математическая модель электромагнитных процессов в синхронном генераторе
- •7.5. Векторные диаграммы синхронных генераторов
- •7.6. Характеристики синхронных генераторов
- •7.7. Потери мощности и КПД синхронного генератора
- •7.8. Параллельная работа синхронных машин
- •7.9. Мощность и электромагнитный момент
- •7.10. Статическая устойчивость
- •7.12. Качания синхронных машин
- •7.13. Синхронные двигатели
- •7.14. Внезапное короткое замыкание синхронной машины
- •7.15. Несимметричные режимы работы синхронных генераторов
- •8. СИНХРОННЫЕ МАШИНЫ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
- •8.1. Назначение и особенности рабочего режима
- •8.4. Синхронные гистерезисные двигатели
- •9. МАШИНЫ ПОСТОЯННОГО ТОКА
- •9.1. Магнитная цепь машины и метод ее расчета
- •9.2. Основные электромагнитные соотношения в машине постоянного тока
- •9.3. Магнитное поле машины постоянного тока
- •9.4. Напряжение между коллекторными пластинами и компенсационная обмотка
- •9.5. Коммутация
- •9.6. Потери мощности. Коэффициент полезного действия электрической машины
- •9.7. Генераторный режим работы машины
- •9.8. Параллельная работа генераторов постоянного тока
- •9.9. Двигательный режим работы машины
- •9.10. Пуск и реверсирование двигателей постоянного тока
- •9.11. Устойчивость работы двигателей
- •9.12. Двигатели параллельного возбуждения
- •9.13. Двигатели последовательного возбуждения
- •10. СПЕЦИАЛЬНЫЕ МАШИНЫ ПОСТОЯННОГО ТОКА
- •10.1. Исполнительные двигатели постоянного тока
- •10.2. Тахогенераторы
- •10.3. Бесконтактные двигатели постоянного тока
- •ЗАКЛЮЧЕНИЕ
- •БИБЛИОГРАФИЧЕСКИЙ СПИСОК
- •ОГЛАВЛЕНИЕ
|
|
|
|
|
|
|
|
|
|
5. Асинхронные машины |
||
|
r1 |
|
x1 |
|
r2′ |
x2′ |
|
|
U1 |
j x 1I1 |
r I |
|
|
|
|
|
|
|
|
′ |
1 1 |
||||
|
|
I1 |
|
|
|
I2′ |
|
|
|
− Е− I2 |
I1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r0 |
|
′ |
|
|
|
I0 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
′ |
|
|
|
Ф0 |
|||
U |
|
|
I |
|
|
U |
|
′ |
|
|
|
|
|
|
|
0 |
|
|
|
zнг |
|
|
|
||
|
1 |
|
|
|
|
2 |
|
−r′I′ |
|
|||
|
|
|
|
x0 |
|
|
|
|
′ |
|
||
|
|
|
|
|
|
|
|
|
I2 |
|
2 2 |
|
|
|
|
|
|
|
|
|
|
− j x′2I2′ |
Е′ |
= Е |
|
|
|
|
|
|
|
|
|
|
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
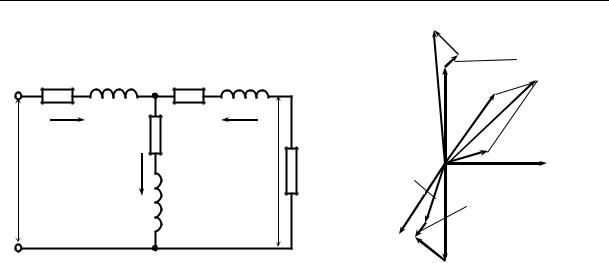
Рис. 5.4. Схема замещения неподвижной |
Рис. 5.5. Векторная диаграмма при |
асинхронной машины |
неподвижном роторе |
Совместное решение трех уравнений (5.26), (5.28) и (5.29) относительно тока I1 позволяет получить для него такое же выражение, что и для трансформатора, и, соответственно, схему замещения (рис. 5.4), повторяющую собой схему замещения трансформатора.
Векторная диаграмма, соответствующая приведенной на рис. 5.4 схеме замещения, показана на рис. 5.5.
5.2. Фазорегуляторы и индукционные регуляторы напряжения
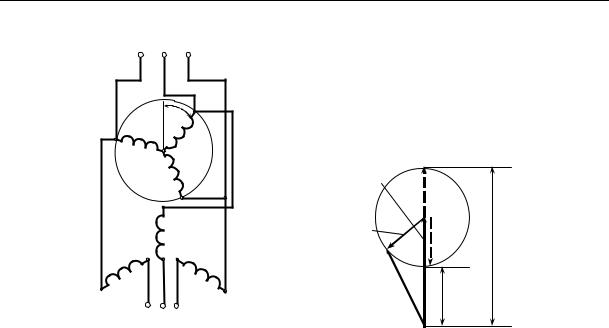
Фазорегулятор. Асинхронная машина с заторможенным фазным ротором может дать со стороны одной из обмоток постоянную по величине, но меняющуюся по фазе ЭДС. Для этого обмотки машины следует включить, как показано на рис. 5.6, а, а ротор повернуть в любую сторону на угол α.
На такой же угол окажется повернутым вектор ЭДС вторичной обмотки относительно вектора первичной ЭДС: в рассматриваемом случае результирующий поток Φ в зазоре машины набегает сначала, например, на обмотку фазы B, а позже − на обмотку фазы b, оси которых пространственно смещены на угол поворота α. Если принять для простоты, что у рассматриваемой асинхронной машины r1 = r2 = xσ1 = xσ2 = 0, то U1 = E1 и U2 = E2. В этом случае диаграмма напряжений для одной из фаз примет вид, показанный на рис. 5.6, б.
189
5. Асинхронные машины
|
Uвх |
|
|
U1 = −Е1 |
|
В |
|
|
|
А |
|
С |
|
|
а |
α |
b |
α |
|
|
|
|
||
|
|
|
|
|
|
c |
Е2[α>0] |
|
|
|
|
Е2[α=0] =U2 |
||
|
Uвых |
|
|
|
|
а |
|
|
б |
Рис. 5.6. Схема фазорегулятора
Фазорегулятор представляет поворотный трансформатор с регулируемой фазой вторичного напряжения относительно первичного. Поворот ротора осуществляют при помощи червячного редуктора с самоторможением, так как на ротор фазорегулятора при нагрузке действует вращающий момент. Это относится и к другим машинам с заторможенным ротором. Фазорегуляторы применяют главным образом в лабораториях, в частности, при испытании счетчиков электрической энергии различных реле и других приборов и аппаратов.
Трехфазный индукционный регулятор служит для регулирования на-
пряжения трехфазной сети переменного тока. Обмотки регулятора включают по схеме автотрансформатора, и регулятор представляет собой поворотный автотрансформатор.
Обмотки статора и ротора асинхронной машины можно соединить, как показано на рис. 5.7, а, и подключить обмотку ротора к сети напряжением Uвх. Ток обмотки ротора создаст вращающееся магнитное поле, которое индуктирует в каждой обмотке ЭДС E1 и E2. Эти ЭДС, оставаясь неизменными по величине, могут отличаться по фазе.
При совпадении осей обмоток статора и ротора сдвига фаз между ЭДС E1 и E2 нет (рис. 5.7, б). Напряжение на выходных зажимах определится арифметической суммой векторов ЭДС Е1 и Е2 и достигнет макси-
мального значения (Uвых = Еmax ).
При повороте ротора на некоторый угол ±α вектор ЭДС Е2 опережает или отстает на тот же угол относительно ЭДС Е1 . При повороте ротора на 180° векторы ЭДС Е1 и Е2 направлены встречно и выходное напряжение равно разности этих ЭДС (Uвых = Еmin ).
190
5. Асинхронные машины
а) |
Uвх |
|
|
|
|
|
|
а |
α |
b |
|
|
|
|
|
|
c |
Е1 |
|
|
|
|
|
|
В |
Е2 |
Еmax |
|
|
|
|
А |
|
Е |
рез |
|
С |
Еmin |
|
|
Uвых |
|
|
|
а |
|
б |
Рис. 5.7. Схема (а) и векторная диаграмма (б) напряжений индукционного регулятора
В общем случае напряжение на выходных зажимах определяется векторной суммой:
U |
вых |
= Е |
рез |
= E |
+ E |
2 |
(5.30) |
|
|
1 |
|
|
и при равенстве эффективных витков статорной и роторной обмоток может плавно изменяться от нуля (при α = ±180°) до двойного линейного напряжения сети (при α = 0).
Индукционные регуляторы по своей работе аналогичны автотрансформаторам, и их электромагнитная (расчетная) мощность тем меньше проходной (полезной), чем ниже пределы регулирования напряжения. Преимуществом регуляторов является плавное регулирование напряжения в широких пределах. К недостаткам этих машин следует отнести:
•искажение формы кривой ЭДС (и выходного напряжения) зубцовыми и высшими гармониками магнитного поля;
•возникновение вращающих моментов на валу при α ≠ 0;
•расхождение по фазе напряжений перед регулятором и за ним. Последние два недостатка устраняют, сдвоив регуляторы, т. е. же-
стко соединив их валы и изменив порядок чередования фаз в одной из машин.
191

5. Асинхронные машины
5.3. Работа асинхронной машины при вращающемся роторе
При вращении ротора вращающееся магнитное поле, пересекая витки его обмотки с частотой n1 – n, индуцирует в них ЭДС частотой
f2 = (n1 − n) , |
(5.31) |
где n – частота вращения ротора, об/с.
Достаточно умножить выражение (5.31) на дробь n1/n1, чтобы доказать с учетом соотношений (1.24) и (1.30), что частота тока в роторе пропорциональна скольжению:
f |
2 |
= |
p(n |
− n) |
n1 |
= |
pn |
|
(n1 − n) |
= |
f s . |
(5.32) |
|
|
|||||||||||
|
|
1 |
|
n1 |
1 |
|
n1 |
|
1 |
|
||
|
|
|
|
|
|
|
|
|
|
|||
ЭДС обмотки вращающегося ротора |
|
|
|
|
|
|||||||
|
|
|
|
E2s = 4,44 f2w2koб2Φ |
|
|
(5.33) |
|||||
или с учетом выражения (5.33) |
|
|
|
|
|
|
||||||
|
|
|
E2s = 4,44 f1sw2koбΦ = E2s , |
|
|
(5.34) |
||||||
где E2 – ЭДС обмотки неподвижного ротора, полученная по выражению (5.2), когда s = 1 и f2 = f1, а обмотка ротора разомкнута (режим холостого хода при неподвижном роторе).
При замкнутой обмотке ротора по ней под действием ЭДС E2s проходит ток с частотой f2, создающий бегущую волну МДС F2, вращающуюся относительно ротора с частотой
n2F = 60 f2 p = 60 f1s p = n1 s = n1 − n . |
(5.35) |
Направление вращения МДС ротора определяется порядком чередования максимумов токов в фазах, т. е. МДС ротора вращается в ту же сторону, что и магнитное поле статора.
Частота вращения МДС ротора относительно статора (с учетом того, что ротор вращается с частотой n)
n2′F = n + n2F = n1 (1 − s) + n1s = n1 . |
(5.36) |
192

5. Асинхронные машины
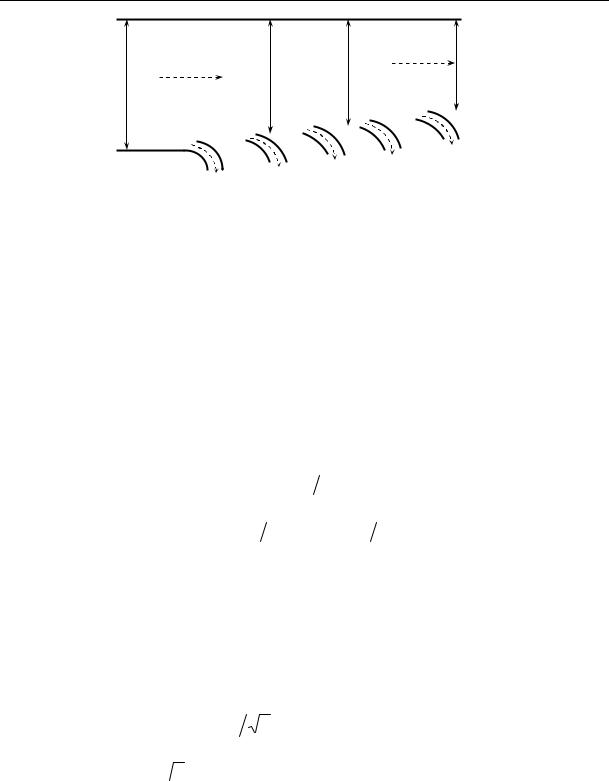
Следовательно, при вращении ротора МДС статора F1 и МДС ротора F2 вращаются в пространстве с одинаковой частотой, т. е. относительно друг друга они неподвижны. Таким образом, полученные ранее для заторможенного ротора выводы о взаимодействии токов в первичной и вторичной обмотках полностью остаются в силе и для вращающегося ротора. Из сказанного следует, что в асинхронной машине магнитное поле, вращающееся с частотой n1, возникает в результате совместного действия бегущих волн МДС статора и ротора. Оно служит связующим звеном между статором и ротором, обеспечивая обмен энергией между ними точно так же, как переменное магнитное поле в трансформаторе осуществляет передачу энергии из первичной обмотки во вторичную. Преобразование электрической энергии, потребляемой асинхронной машиной, в механическую и связанные с этим потери мощности наглядно представляются энергетическими диаграммами.
Если к асинхронному двигателю подвести от сети электрическую мощность P1, то часть ее покроет потери электрические pэл1 в проводниках обмотки статора, часть – магнитные потери рмг в статоре.
Мощность Р1 − pэл1 − рмг = Рэм − электромагнитная – передается магнитным полем через воздушный зазор ротору. Некоторая часть мощности Рэм пойдет на покрытие потерь pэл1 в проводниках обмотки ротора, другая, весьма незначительная и в большинстве случаев вовсе не учитываемая из-за малой частотыперемагничивания, рмг2 − напокрытиемагнитныхпотерьвроторе.
Разность мощностей Рэм − pэл1 − рмг = Рмх − полная механическая мощность – приведет ротор во вращение. При этом возникнут потери на трение в подшипниках и поверхности ротора об охлаждающую среду. Вычитанием из полной механической мощности потерь на трение и добавочных (покрываемых главным образом со стороны ротора) получают полезную механическую мощность на валу
Рмх − рмх − рд = Р2. |
(5.37) |
Энергетическая диаграмма асинхронного двигателя приведена на рис. 5.8.
Выразим электромагнитную и механическую мощности через электромагнитный вращающий момент М:
Рэм = Ω1М, |
(5.38) |
Рмх = ΩМ, |
(5.39) |
где Ω1 = 2πn1 и Ω = 2πn – угловые скорости магнитного поля статора и ротора; n1 и n – частоты вращения, соответственно, магнитного поля статора и ротора, об/с.
193
5. Асинхронные машины
Р1 |
|
|
|
|
Рмх |
|
|
Р2 |
|
||||
|
|
Рэм |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
рд |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
рэл2 |
рмх |
|
|||||
рэл1 |
|
|
|
|
|
|
|
|
|
||||
|
|
рмг |
|
|
|
|
|
||||||
Рис. 5.8. Энергетическая диаграмма |
|
||||||||||||
|
|
асинхронного двигателя |
|
||||||||||
Из энергетической диаграммы (рис. 5.8) следует, что |
|
||||||||||||
или |
рэл2 = Рэм − Рмх |
|
|
|
|
(5.40) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
рэл2 = М(Ω1 − Ω) = МΩ1(Ω1 − Ω) / Ω1 = МΩ1s . |
(5.41) |
||||||||||||
Решив выражение (5.41) относительно момента М, получим |
|
||||||||||||
откуда |
М = рэл2 (Ω1s) , |
|
|
|
|
(5.42) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
s = pэл2 (MΩ1) = рэл2 |
Рэм . |
(5.43) |
||||||||||
Полученные формулы (5.42) и (5.43) устанавливают связь между скольжением и коэффициентом полезного действия, зависимость электромагнитного момента от параметров машины и режима ее работы.
Формула (5.42) позволяет перейти (с учетом выражения (5.34) и под-
становки значений Ω1 = 2πf1/p и pэл2 = m2E2sI2cos ψ2) к более удобному для анализа асинхронной машины виду
М = ( p m2w2 koб2 2)ΦтI2 cosψ2 = cмΦтI2 cosψ2 , |
(5.44) |
где см = pm2w2koб2 /  2 − постоянная; ψ2 – угол сдвига фаз между вектора-
2 − постоянная; ψ2 – угол сдвига фаз между вектора-
ми ЭДС и тока ротора.
Формула (5.44) справедлива для электрических машин всех типов.
Всегда электромагнитный момент пропорционален произведению магнитного потока на активную составляющую тока ротора.
Эта формула позволяет связать величину момента с физическими явлениями, происходящими в двигателе. Ею удобно пользоваться при
194