

Семь доказательств
.pdf1 = 1 +
Путь же, на котором будет происходить действие силы для правого тела, равен только пути перемещения центра массы правого тела:
2 = 2
Ещё раз отмечаем, что согласно закону Ньютона, силы равны по величине, но противоположны по направлению, поэтому работа сил для левого тела равна:
1 = 1 + , а для правого тела равна только:
2 = 2
Это уже 300 лет или даже более, как общеизвестно, причём левое тело не имеет ограничений и запретов на вращение.
Не равная нулю работа = в виде разности указанных работ, выполняется в результате того, что сумма двух, не равных нулю, работ не может быть равна одной из них.
Следовательно, величина пути, вдоль которого переместилось правое тело, всегда превышает величину пути, вдоль которого переместилось левое тело:
2 > 1
Что и требовалось доказать!
5. ЧЕТВЁРТОЕ ДОКАЗАТЕЛЬСТВО: ИЗ МОЩНОСТИ
ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ
Содержание
Рассмотрим, какими величинами мощностей преобразования энергии характеризуются внутренние процессы замкнутых транспортных систем, представленных на рис. 1 и рис. 2 в каждом из двух
равных повторяющихся полупериодов 1 и 2 .
Для определения функции мощности преобразования энергии в замкнутой системе в каждом
из двух равных повторяющихся полупериодов 1 и 2, будем относить дифференциалы энергий к
дифференциалу времени её преобразования, которым является каждая из равных друг другу половин полного повторяющегося периода действия внутренних сил.
Применительно к электродвигателям, которые подвижны относительно стапеля, в результате приложение к их поверхностям вращения моментов сил в течение первой половины периода 1 их дей-
ствия, массы их и моменты инерции приобретают полный дифференциал кинетической энергии (57)
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
1 |
( |
, |
) = |
1 |
( |
) + |
1 |
( |
|
) = |
|
|
2( |
) |
+ |
|
|
( |
|
) |
(23) |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
, |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а в результате приложения противоположно направленных сил к их центрам масс в течение второй половины периода 2 их действия, массы электродвигателей приобретают только дифференциал кинетической энергии поступательного движения, поскольку составляющая дифференциала кинетической энергии вращательного движения рекуперируется в бортовой источник электрической энергии
(аккумулятор): |
|
2 |
|
|
|
|
|
|
|
|
|
2 ( ) = |
|
2( |
|
) |
(24) |
11

Применительно к стапелю, дифференциалы приобретаемой его массами кинетической энергии и в течение первых, и в течение вторых половин периодов действия внутренних сил равны дифференциалам кинетической энергии, приобретаемой электродвигателями, поскольку посредством одних и тех же сил формируются и моменты сил, прикладываемых к поверхностям вращения электродвигателей,
ите силы, которые прикладываются к центру масс стапеля.
Врезультате полный дифференциал кинетической энергии системы в первом полупериоде 1 действия внутренних сил равен:
Σ 1 ( , ) = 2 1 ( , ) = 2 1 ( ) + 2 1 ( ) = ( 2) + ( 2) |
(25) |
Во втором полупериоде 2 действия внутренних сил полный дифференциал кинетической энергии системы равен:
Σ 2 ( ) = 2 2 ( ) = 2 2 ( ) = ( 2) |
(26) |
Для определения мощности Σ преобразования энергии в замкнутой системе в первом и втором полупериодах, отнесём соответствующие полные дифференциалы энергии (25) и (26) замкнутой системы к дифференциалу времени её преобразования, которым является каждый из двух равных полупериодов действия внутренних сил/
В результате мощность преобразования энергии в первом полупериоде 1 равна:
2 |
|
|
2 |
|
|
|
|
|
||
1 = |
|
Σ 1 ( , ) = |
|
( ( 2) + |
( 2) |
(27) |
||||
|
|
|||||||||
Во втором полупериоде 2 мощность преобразования энергии равна: |
|
|||||||||
2 |
2 |
|
|
|
||||||
|
2 = |
|
Σ 2 ( ) = |
|
( ( 2) |
|
(28) |
|||
|
|
|
|
|||||||
Исходя из того, что дифференциалы кинетических энергий поступательного и вращательного движения электродвигателей равны друг другу по величине (14), мощность преобразования энергии в первом полупериоде 1 можно представить в следующем виде:
4 |
4 |
|
|
||
1 = |
|
( 2) = |
|
( 2) |
(29) |
|
|
||||
Отношение мощности (29) к мощности (28) указывает на то, что мощность преобразования энергии в первом полупериоде 1 в два раза превышает мощность преобразования энергии во втором полупериоде 2.
Аналогичные результаты получаются и в результат дифференцирования по времени работ внутренних сил и моментов сил согласно (19) и (21):
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
= |
( |
|
+ |
|
|
|
) |
= Π|
|
+ |
( |
|
|
) |
‘ |
(30) |
||
|
|
|
|
|
|
||||||||||||||
|
|
|
|
2 |
|
= |
|
|
|
|
|
|
|
(31) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Сопоставление (30) с (31) указывает на то, что мощность преобразования энергии в первом полупериоде действия внутреннего момента сил всегда больше мощности преобразования энергии во втором полупериоде действия только сил, что и обеспечивает общей массе системы приобретение ускорения поступательного движения.
Дополнительные выводы можно сделать на основании того, что мощность является производной функцией работы во времени.
12

Функция работы − есть дифференциал энергии, затраченной на её выполнение.
=
Используя представленные выше зависимости работ, выполняемых внутренними силами и моментами для придания ускоренного поступательного и вращательного движения левому и правому телам, после их дифференцирования, определяем мощности для левого тела:
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||
|
1 = |
|
= |
|
|
|
+ |
|
|
|
|
|
= 1 + , |
||||||
и для правого тела: |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||
|
|
|
|
2 = |
|
|
= |
|
|
|
2 |
= 2 |
|||||||
|
|
|
|
|
|
|
|
|
|||||||||||
Результат сопоставления этих мощностей указывает на то, что мощность выполнения работ по одновременному приданию ускорений поступательного и вращательного движения левому телу отличается от мощности выполнения работ по приданию ускорений только поступательного движения правому телу.
Если бы скорости поступательного движения центров масс тел были одинаковыми:
2 = 1,
то это могло было бы быть только в случае центрального их взаимодействия, когда отсутствует вращательное движение, что противоречит начальным условиям подвижности тел.
Следовательно:
2 > 1,
что и требовалось доказать.
6. ПЯТОЕ ДОКАЗАТЕЛЬСТВО: ИЗ ПЕРЕДАТОЧНЫХ
ФУНКЦИЙ СИСТЕМЫ
Содержание
На рис. 5 представлена структурная схема механической части формирователя внутренних сил (рис. 3), за счёт выполнения работ которыми как раз и формируется дифференциал кинетической энергии поступательного движения всех масс Σ системы в результате придания им ускорения .
Под передаточной функцией в теории автоматического регулирования понимается отношение изображений (например, с использованием преобразований Лапласа) выходной величины к входной, в данном случае — изображения ускорения Σ( ) поступательного движения всех масс Σ системы к изображению воздействующих на них внутренних равных и противоположно направленных сил ( )
и − ( ):
|
|
|
|
Σ |
|
|
|
|
|
|
( |
|
) = |
|
|
( ) |
— передаточная функция системы с общей массой Σ |
(32) |
|
|
|
|
( |
) |
|
|
|||
13

Рис. 5. Структура двухмассовой системы перемещения в пространстве с внутренней опорой
Таким же образом определяются и передаточные функции всех звеньев, входящих в состав замкнутой системы:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
( ) = |
( ) |
= |
|
|
— передаточная функция стапеля с массой ; |
(33) |
|||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
( |
) |
1 |
|
— передаточная функция подвижного тела с массой ; |
(34) |
|||||
|
|
|
( |
) = |
( ) |
= |
|
||||||||||||
|
|
|
|
|
|
2 |
|
) |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
( |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
( ) |
|
|
|
— передаточная функция подвижного тела с моментом инерции . |
(35) |
|||||||||
|
|
|
|
|
|||||||||||||||
|
связи с малостью величины реальной упругой механической деформацией тел, входящих в со- |
||||||||||||||||||
В |
|
( |
) = |
|
( |
|
) = |
|
|
|
|
|
|
|
|
|
|
|
|
став системы, все рассматриваемые звенья остаются безынерционными, а передаточные их функции (33), (34) и (35), описываемые линейными уравнениями, вырождаются в коэффициенты передач (усилений).
Коэффициент передачи (передаточная функция) представленной на рис. 5 структуры механической
части всей замкнутой системы в конечном итоге имеет вид алгебраической суммы всех передаточных функций звеньев, входящих в её состав:
|
|
|
|
|
|
|
|
1 |
|
|
1 2 |
|
|
|
|
|
|
|
2 |
|
|
|||||
( |
) = |
( |
) − |
( |
) − |
( |
) = |
|
|
− |
|
|
− |
|
= |
|
|
− |
|
|
− |
|
|
= |
|
(36) |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Передаточная функция не зависит от величины входного воздействия, а изображение выходной величины Σ( ) (ускорения поступательного движения) всегда определяется произведением изображения входной величины, в нашем случае — изображением силы ( ), на эту передаточную функцию:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
Σ |
( |
|
) = |
|
( |
|
) |
|
( |
|
) = |
|
|
|
− |
|
|
− |
|
|
|
|
|
|
|
( |
|
) = |
|
|
|
( |
|
) |
(37) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Обратим внимание и отметим на будущее, что если |
следовать законам Ньютона, то коэффици- |
||||||||||||||||||||||||||||||||||
ент передачи замкнутой механической системы в (32) должен быть не чем иным, как величиной,
обратная её суммарной массе Σ: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Σ |
|
|
1 |
|
||
|
= |
|
( |
|
) = |
|
|
( ) |
= |
|
(38) |
|
|
Σ |
|||||||||||
|
|
|
|
( |
) |
|
|
|||||
14

Теперь рассмотрим структурную схему (рис. 6) той же механической части замкнутой системы, но уже в иных условиях, когда кинематика её изменилась таким образом, что внутренняя сила прикладывается относительно массы к центру его масс (рис. 4), а не к поверхности вращения подвижного тела с массой и моментом инерции , как это было в предшествующем полупериоде.
Рис. 6. Структура двухмассовой системы перемещения в пространстве с внутренней опорой
В этом случае передаточная функция механической системы, соответствующая иной её кинематике, отличается тем, что в ней отсутствует передаточная функция звена с моментом инерции подвижного тела:
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
− |
|
|
1 |
(39) |
||||||
( |
) = |
( |
|
) − |
|
|
( |
) = |
|
|
− |
|
= |
|
|
|
= |
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
В результате этого (32) принимает вид: |
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
( |
) = |
|
|
|
|
( |
) = |
1 |
|
( |
) |
|
|
|
(40) |
||||||
|
|
Σ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
В течение каждого, например, нечётного полупериода действия внутренней силы и противоположно направленной внутренней силы − реакции, общая масса Σ системы приобретает ускорение поступательного движения, зависящее от суммы ускорений поступательно и вращательно движущихся массы тела и его момента инерции соответственно, а в течение каждого, например, чётного полупериода действия силы воздействия и силы − реакции, общая масса Σ системы приобретает противоположно направленное ускорение поступательного движения, зависящее только от ускорения поступательно движущейся массы тела. Поскольку сумма двух, не равных нулю величин, всегда больше одной из них, то, следовательно, дифференциал скорости поступательного движения центра масс всей системы в каждом нечётном полупериоде действия внутренних сил всегда больше аналогичного дифференциала скорости в каждом чётном полупериоде их действия.
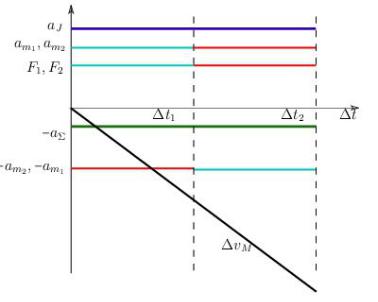
На рис. 7 представлен график, отражающий изменения внутренних сил, ускорений и скоростей тех тел системы, которые участвуют в формировании ускорения Σ поступательного движения общей массы Σ всей системы.
15

Рис. 7. Структура двухмассовой системы перемещения в пространстве с внутренней опорой
В течение первых (чётных) половин периодов |
|
|
1 |
|
3 |
|
2 поочерёдного повторения |
силовых воздействий в виде моментов силы на |
поверхность вращения подвижного тела с массой |
||||||
|
= |
|
= |
|
− |
|
|
и моментом инерции , формируются ускорения его поступательных и — вращательных движений, в результате чего дифференциал полной величины кинетической энергии подвижного тела всегда равно дифференциалу той кинетической энергии, которая приобретается стапелем в результате ускорения его масс , что находится в полном соответствии с законом сохранения энергии.
В течение вторых (нечётных) половин периодов |
|
2 |
|
1 |
|
4 |
|
3 поочерёдного повто- |
||
рения силовых воздействий в виде силы |
, |
приложенной к центру массы , формируются только |
||||||||
|
= |
|
− |
|
= |
|
− |
|
||
противоположно направленное ускорения его поступательного движения, в результате чего полная величина кинетической энергии подвижного тела также всегда равна той кинетической энергии, которую теряет стапель в результате ускорения замедления − его масс , что также находится в полном соответствии с законом сохранения энергии.
График изменения дифференциала скорости поступательного движения (рис. 7) отражает поочерёдность её изменения в течение каждого полупериода поочерёдного действия силы , прикладываемой относительно стапеля сначала к поверхности вращения подвижного тела, а затем — к центру его масс.
Следовательно, при однополупериодном поочерёдном формировании внутренних силовых воздействий, скорость поступательного движения всех масс замкнутой системы, перемещающейся в пространстве без взаимодействия с массами внешней среды в качестве опоры, возрастает не только неравномерно, но даже и при знакопеременных ускорениях, что относится к недостаткам таких систем.
Для исключения указанного недостатка в заявке на изобретение предложен такой способ и устройство для его осуществления, которые обеспечивают полную равномерность ускоренного движения общей массы системы.
Существо этого способа состоит в том, что используется двухполупериодная механическая схема формирования внутренних силовых воздействий, упрощённо изображённая на рис. 8 в виде трёхмассовой системы.
16

Рис. 8. Конструкция трёхмассовой системы перемещения в пространстве с внутренней опорой
Отличие её от однополупериодной конструкции состоит в том, что ускорения и замедления поступательно движущихся масс всегда остаются взаимно скомпенсированными, а структурная схема такой системы приобретает вид, представленный на рис. 9
Исходя из такой структуры, её передаточная функция имеет вид:
|
|
|
|
|
|
1 2 |
|
|
|
|
2 |
|
|
||||
( |
) = |
( |
) − |
( |
) = |
|
− |
|
= |
|
− |
|
|
|
= |
0 |
(41) |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Рис. 9. Структура трёхмассовой системы перемещения в пространстве с внутренней опорой
Исходя из этой передаточной функции, получаем следующий вид зависимости ускорения Σ
ступательного движения центра масс Σ все системы от величины внутренней силы :
Σ |
|
|
|
− |
|
|
2 |
|
|
|
|
0 |
|
|
|
|
|
||||
( |
) = |
|
|
|
|
|
|
( |
) = |
|
( |
) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
по-
(42)
17
На рис. 10 представлены графики изменения сил, ускорений и скоростей замкнутой механической системы перемещения в пространстве без её взаимодействия с массами внешней среды в качестве опоры применительно к двухполупериодной схеме формирования внутренних силовых воздействий.
Рис. 10. Графики изменения сил, ускорений и скоростей замкнутой механической системы
Обратим внимание на функции (37), (40) и (42). Все они выражают зависимость ускорения Σ
поступательного движения замкнутой механической системы от величины внутренней силы взаимодействия массы стапеля с иными телами, принадлежащими этой же механической системе и подвижными относительно её стапеля.
С учётом общеизвестных положений, вытекающих из законов Ньютона, должно следовать, что каждый из коэффициентов передачи , 1 и 0 должен бы соответствовать обратной величине общей массы Σ всей системы. Но, вопреки таким ожиданиям, в рассматриваемых примерах коэффициенты передач отличаются не только от обратной величины общей массы Σ всей системы, но и друг от друга.
Согласно законам Ньютона, коэффициенты передачи , 1 и 0 в (37), (40) и (42) должны соответствовать обратной величине одной и той же физической массы Σ рассматриваемой системы, неизменность которой, на первый взгляд, подтверждается тем, что из системы не изымались никакие тела, а менялась всего лишь кинематика механических связей, обеспечивающих разные условия прохождения внутренних процессов взаимодействия тел, входящих в состав замкнутой механической системы.
Кажущееся несоответствие полученных результатов с положениями законов Ньютона вполне объяснимо, и в этом не будет содержаться ничего необычного после того, как будет проанализирован тот подход к пониманию существа массы и силы, который уже изначально был заложен в работах и выводах Ньютона.
А этот подход основан был на использовании систем отсчёта координат, позволяющих исследовать не абсолютные, а всего лишь относительные процессы, при рассмотрении которых свойства объектов воздействий и свойства объектов восприятия воздействий зависят не только от свойств самих этих объектов, но и от того, в каких системах отсчёта координат эти объекты рассматриваются.
Надо осознавать и свыкнуться с тем, что вне систем отсчёта координат под силой можно понимать только свойство объекта воздействовать на другой объект, а под массой можно понимать только
18
свойство объекта воспринимать воздействия.
Свойства объектов не могут являться физическими величинами, поэтому и упоминаемая, например, в лекциях Фейнмана неразрешимость взаимосвязи между силой, массой и ускорением становится вполне объяснимой, поскольку, как будет показано далее, свойства тел могут меняться в зависимости от того, в какой системе отсчёта координат они рассматриваются.
Когда объект фиксируется, например, в начале системы отсчёта координат и, по своему существу, превращается в неподвижный объект, то он может восприниматься только однозначно — как объект восприятия воздействия, не обладающий кинетической энергией, свойствами которого может обладать, по задумке Ньютона, только масса. При этом любой иной объект, движущийся с определённой скоростью в той же системе координат и обладающий кинетической энергией, может восприниматься так же только однозначно — как объект возможного воздействия, который может обладать, по задумке того же Ньютона, только свойствами источника энергии, воздействующего посредством силы на приёмник энергии, каковым может являться объект, движущийся с меньшей скоростью или же находящийся в состоянии покоя.
При этом результаты взаимодействия объектов воздействия и восприятия воздействия в выбранной системе отсчёта координат всегда остаётся не абсолютными, а всего лишь относительными. Даже величина ускорения поступательного движения может менять знак и направление в зависимости от выбора системы отсчёта координат.
Как только начало системы отсчёта координат по мановению мысли переносится в центр масс другого объекта, свойства объектов меняются на противоположные: объект со свойствами массы превращается в объект со свойствами силы, и наоборот, причём не реально физически, а всего лишь в результате банального и при этом всего лишь виртуального перемещения начала отсчёта системы координат, что можно понимать и рассматривать лишь как псевдонаучную забаву или примитивное баловство.
Но и эти выводы являются всего лишь одной стороной особенностей взаимодействия объектов, если их представлять согласно законам Ньютона. Иная же сторона особенностей взаимодействий тел состоит в том, что законы Ньютона определяют состояния объектов, участвующих исключительно только в поступательных прямолинейных движениях. А всё иное, что касается вращательного движения и участия объектов одновременно в поступательных и вращательных движениях, — в полном объёме не может подпадать под действие законов Ньютона, поскольку не может быть описано с использованием только одной системы отсчёта координат, что и подтверждает многовековая стагнация научной деятельности, основанной на использовании только лишь законов Ньютона и систем отсчёта координат, которые вполне обоснованно используются при выполнении простейших хозяйственных операций, но не могут служить основой для проведения научных исследований, особенно в части тех из них, которые касаются изучения пространственных процессов, в основе своей инвариантных к самим системам отсчёта.
В рассматриваемом примере как раз и представлен тот случай, когда анализируются процессы вне систем отсчёта координат, причём одновременно проходящие и в свободе учёта изменения величин линейных протяжённостей — при поступательных движениях объектов, и в свободе учёта изменения величин угловых протяжённостей — при вращательных движениях объектов.
Свойства объектов воздействия и объектов восприятия воздействий следует рассматривать комплексно, с учётом реально происходящих процессов, а не только отдельных их составляющих, кото-
19

рые, будучи искусственно выделенными, не то что не могут обобщённо характеризовать систему, но даже способны и исказить её существо, как это было в известные времена безудержной и безумной критики систем безопорного движения буквально на всех уровнях научной иерархии, и как это мы наблюдаем даже сейчас на простейших примерах, связанных с анализом замкнутых механических системы.
В ближайшее время к этому вопросу ещё раз возвратимся отдельно и более подробно рассмотрим особенности совокупного учёта изменения величин в объектах, одновременно участвующих и в поступательных, и во вращательных движениях под действием внутренних сил замкнутой системы перемещения в пространстве без её взаимодействия с массами внешней среды в качестве опоры.
Особенно полезными могут оказаться полученные результаты уже проведённых исследований, касающихся особенностей передаточных функций атомов, пока ещё лежащие в основе общего понимания массы вообще, но при этом без всякой взаимосвязи с теми внутренними обратными связями, которыми они располагают и которые предопределяют их физические свойства.
Пока же эта информация может стать лишь основой для раздумий и принятия решений, касающихся замкнутых систем вообще, и замкнутых систем перемещения в пространстве без взаимодействия
смассами внешней среды в качестве опоры — в частности.
7.ШЕСТОЕ ДОКАЗАТЕЛЬСТВО: ИЗ ТЕОРЕМЫ
КЁНИГА-ЮРЬЕВА
Содержание
Согласно теореме Кёнига-Юрьева: Полная кинетическая энергия тела равна сумме кинетиче-
ской энергии поступательного движения центра масс и кинетической энергии вращательного движения относительно центра масс, умноженной на квадрат суммы единицы и произведения модуля угловой скорости вращения тела на коэффициент, учитывающий свойства тела и имеющий размерность, обратную размерности угловой скорости.
= |
2 |
+ |
2 |
(1 + )2 |
(43) |
22
Эта теорема учитывает то обстоятельство, что «Момент инерции вращающегося тела также,
вообще говоря, не является постоянной величиной, а зависит от угловой скорости, так как всякое физическое тело не является абсолютно твёрдым и испытывает деформации при вра-
щении» [Андронов А.А., Витт А.А., Хайкин С.Э. Теория колебаний. 2-е изд., перераб. и испр. - М.: Наука, 1981. - 918 с. (стр. 23)].
Обратимся к (рис. 11), на котором изображён прибор Обербека, предназначенный для исследования влияния момента инерции на угловое ускорение, и используем его возможности для доказательства того, что действительно момент инерции тела зависит от угловой скорости. Для этого освободим грузы прибора, сделав их подвижными и подпружиненными с обеих сторон упругими элементами таким образом, что при нулевой угловой скорости 0 расстояния между грузами и осью вращения прибора равно 0.
20