

-
Схемы замкнутых структур электропривода
Замкнутые структуры ЭП строятся по принципам компенсации возмущения и отклонения, называемому также принципом обратной связи. Рассмотрим принцип компенсации наиболее характерного внешнего возмущения ЭП, момента нагрузки Мс, при регулировании скорости со. Основным признаком замкнутой структуры ЭП является наличие цепи, по которой на вход ЭП (рис. 11.1, о) вместе с задающим сигналом скорости С/з.с подается сигнал U^=k^M^, пропорциональный моменту нагрузки Мс. В результате этого управление ЭП осуществляется суммарным сигналом ?7д, который автоматически изменяется в нужную сторону при колебаниях- момента нагрузки, обеспечивая с помощью системы управления поддержание скорости ЭП на заданном уровне.
Несмотря на свою эффективность, ЭП по схеме рис. 11.1,0 выполняются редко из-за отсутствия простых и надежных датчиков момента нагрузки М^ (возмущающего воздействия).


Рис. 11.1. Замкнутые структуры ЭП с компенсацией возмущения (а) и с обратной связью, (б
В связи с таким положением подавляющее большинство замкнутых структур электропривода строятся по принципу отклонения (обратной связи). Он характеризуется наличием цепи обратной связи, соединяющей выход ЭП с его входом, откуда и пошло название замкнутых схем. Применительно к признаком этой структуры является цепь обратной связи (рис. 11.1,6), по которой информация о текущем значении скорости (сигнал обратной связи <7о.с=^ос<й) подается на вход.ЭП, где он вычитается из сигнала задания скорости [/з.с- Управление ЭП осуществляется сигналом отклонения U^ = Е/з. с – ^о. с (его также называют сигналом рассогласования или ошибки). Этот сигнал при отличии скорости от заданного уровня автоматически изменяется необходимым образом и устраняет с помощью системы управления ЭП эти отклонения. Тем самым управление движением осуществляется с учетом его результата.
Все виды применяемых в замкнутом ЭП обратных связей делятся на положительные и отрицательные, линейные и нелинейные, жесткие и гибкие. Положительной называется такая обратная связь, сигнал которой направлен согласно (складывается) с задающим сигналом, в то время как сигнал отрицательной связи направлен ему встречно (знак «минус» на рис. 11.1).
Жесткая обратная связь характеризуется тем, что она действует как в установившемся, так и в переходном режимах ЭП. Сигнал гибкой обратной связи вырабатывается только в переходных режимах ЭП и служит для обеспечения требуемого их качества, например устойчивости движения, допустимого перерегулирования и т. д.
Линейная обратная связь характеризуется пропорциональной зависимостью между регулируемой координатой и сигналом обратной связи t/o.c, в то время как при реализации нелинейной связи эта зависимость нелинейна.
В зависимости от вида регулируемой координаты в ЭП используются все названные выше связи по скорости, положению, току, напряжению, магнитному потоку, ЭДС.
Для обеспечения заданного хода и качества технологических процессов на ЭП кроме указанных «внутренних» обратных. связей часто подаются сигналы технологических датчиков, например температуры, натяжения, усилия резания, давления, расхода и т. д. В этом случае ЭП вместе с рабочей машиной или механизмом, реализующим технологический процесс или операцию, образуют систему автоматического регулирования (рис. 11.2).
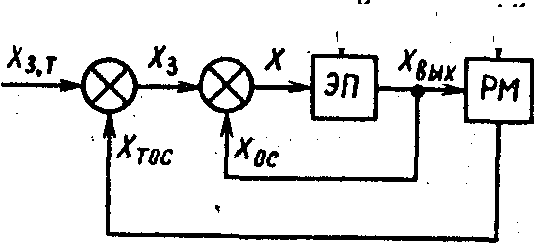
рис. П.2. Схема автоматического регулирования технологического процесса
В этой системе' ЭП является силовым регулирующим устройством, выходная координата которого Х^, (например, скорость) является управляющим воздействием для рабочей машины РМ и обеспечивает заданный ход технологического процесса при .изменениях как его сигнала задания Д^з.т» так и возмущающего воздействия -Увоэм2- Сигналом задания для ЭП в этом случае является сигнал отклонения (рассогласования) между сигналами задания -Уз. т технологического параметра и технологической обратной связи Л^ос-Отметим, что сигналов технологических обратных связей может быть несколько, а для выработки задающего сигнала для ЭП используются ЭВМ или микропроцессоры.
Как уже отмечалось, для управления движением исполнительного органа иногда требуется регулировать несколько координат ЭП, например тока (момента) и скорости. В этом случае замкнутые ЭП выполняются по одной из следующих структурных схем.
Схема с общим усилителем (рис. 11.3). Принятые на схеме обозначения элементов соответствуют общей схеме ЭП рис. 1.1, за исключением электродвигателя, представленного для удобства анализа в виде двух частей – электрической ЭЧД и механической МЧД. Схема обеспечивает регулирование двух координат ЭП – скорости и тока (моментд). В этой схеме сигналы обратных связей по току С/о.с.т и скорости С/о.с.с подаются на вход управляющего устройства YY вместе с задающим сигналом скорости эл
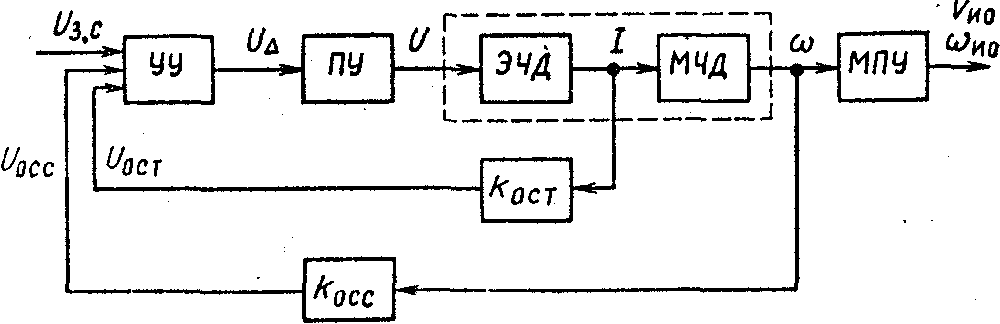
Рис. 11.3. Схема ЭП с общим усилителем
t/з.с, где алгебраически суммируются со своими знаками. Схема отличается простотой реализации, но не позволяет регулировать координаты ЭП независимо друг от друга.
В этой схеме за счет использования нелинейных' обратных связей, называемых в теории ЭП отсечками, удается в некотором диапазоне изменения координат осуществлять их независимое регулирование, что частично устраняет указанный недостаток.
Схема с подчиненным регулированием координат (рис. 11.4). Эта схема отличается от предыдущей (см. рис. 11.3) принципиально другим построением.

Рис. 11.4. Схема ЭП с подчиненным регулированием координат
В ней регулирование каждой координаты осуществляется своими регуляторами – тока РТ, скорости PC, которые вместе с соответствующими обратными связями образуют замкнутые контуры. Они располагаются таким образом, что входным, задающим сигналом для контура тока С/э.т является выходной сигнал внешнего по отношению к нему контура скорости. Таким образом, внутренний контур тока подчинен внешнему контуру скорости – основной, в рассматриваемом примере регулируемой выходной координаты ЭП.
Основное достоинство схемы рис. 11.4 заключается в возможности оптимальной настройки регулирования каждой координаты, в силу чего она находит в настоящее время основное применение в ЭП. Кроме того, подчинение контура тока контуру скорости позволяет простыми средствами осуществлять ограничение тока и момента, для чего необходимо лишь ограничить на соответствующем уровне сигнал на выходе регулятора скорости (он же – сигнал задания уровня тока).
При необходимости регулировать положение вала двигателя в схемы рис. 11.3 и 11.4 вводится соответствующая обратная связь.
Рассмотренные- выше схемы отражают структуру ЭП для отдельно взятых рабочих машин. Многие реальные технологические процессы предусматривают объединение в единый комплекс нескольких рабочих машин и механизмов, должным образом между собой взаимодействующих. Наилучший результат работы такого единого технологического комплекса достигается только при его автоматизации, в чем ЭП принадлежит основная роль. За счет соответствующего управления ЭП обеспечивается требуемая последовательность всех технологических операций, достигаются наилучшие (оптимальные) режимы работы промышленного оборудования и самого ЭП, осуществляются необходимые блокировки и защиты.
Для осуществления управления технологическими комплексами все шире используются ЭВМ. Они позволяют быстро проводить обработку большого объема информации о ходе технологического процесса и вырабатывать управляющие воздействия на ЭП рабочих машин и механизмов в соответствии с заданной программой. Особенно широкие возмож»-. ности открываются при использовании микропроцессорной техники управления, позволяющей осуществлять автоматизацию как сложных технологических-процессов в целом, так и отдельных производственных операций и циклов.