

-
Датчик усилия натяжения жгута.
В качестве измерительного элемента усилия, действующего на ролик, используем электросиловой преобразователь системы ГСП с аналоговым выходным сигналом 0-5ма [].
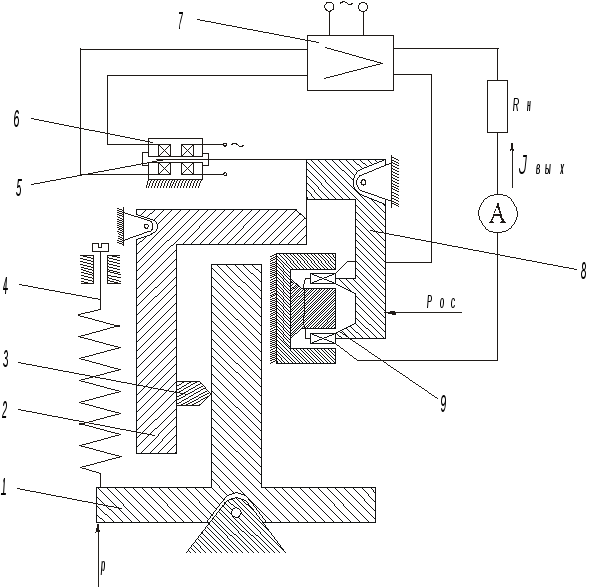
Схема преобразователя приведена на рис. .
Усилие натяжения волокна Р через рычажный передаточный механизм преобразующего элемента, состоящий из Т-образного рычага 1 и Г-образного рычага 2, передается на рычаг 8. Рычаг 8 связан с сердечником 5 индикатора рассогласования 6. Возникающее на индикаторе напряжение рассогласования подается на вход усилителя 7, сигнал с выхода которого поступает в силовое устройство обратной связи 9 и одновременно в линию дистанционной передачи. В силовом устройстве обратной связи 9 вырабатывается усилие РОС, пропорциональное сигналу усилителя. Это усилие через рычаг 8 уравновешивает усилие Р чувствительного элемента преобразователя.
Индикатор представляет собой дифференциально-трансформаторный преобразующий элемент. Взаимоиндуктивность катушек изменяется за счет бокового перемещения пермаллоевого сердечника 5.
Устройство обратной связи выполнено как постоянный магнит, на который надвигается рамочка с током, закрепленная на Г-образном рычаге 8. Чем больше выходной сигнал усилителя, тем больше ток в обмотке обратной связи и тем выше сила взаиможействия между рамочкой и постоянным магнитом. Следовательно усилие обратной связи РОС прямо пропорционально усилию входного сигнала Р.
Преобразователь силы в ток состоит из двух отдельных блоков. Рассотяние между боками должно быть не более 3м или 100м при использовании обычного или экранированного кабеля соответственно. Сопротивление нагрузки – не более 2500Ом.
Структурная схема приведена на рис. .
Настройка на заданный диапазон измерения производится путем изменения передаточного отношения рычажного механизма при плавном перемещении наездника 3 вдоль рычагов 1 и 2. Нулевое значение сигнала прибора устанавливается пружинным корректором 4.
Питание индикатора рассогласования осуществляется переменным током промышленной частоты 50Гц от трансформатора электронного усилителя.
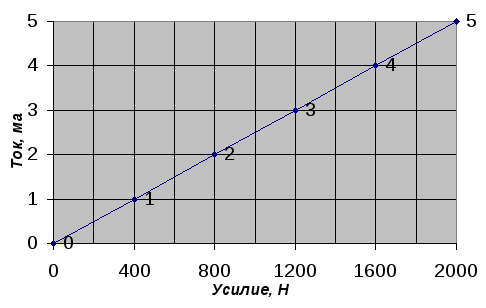
Выбираем датчик с диапазоном измерения входного усилия 0-2000Н, сигнал измерительного преобразователя 0-5ма.
Тогда коэффициент передачи датчика равен
![]() .
.
Будем считать датчик апериодическим звеном первого порядка. Время установления выходного тока на новое установившееся значение при ступенчатом изменении входного усилия равно tПЕР=2сек.
Считая для переходного процесса звена первого порядка tПЕР=4T, найдем постоянную времени датчика усилия
ТД=![]() =0,5сек.
=0,5сек.
Передаточная функция датчика от входного усилия на значение тока будет:
![]() .
.
-
Управляющее устройство
В качестве управляющего устройства используем микропроцессорную систему, предназначенную для управления всем техпроцессом получения углеродного волокна.
На микропроцессоре реализуем последовательное корректирующее устройство WКУ. Синтез корректирующего устройства произведем после определения передаточных функций всех элементов системы.