

-
Датчики скорости и положения, применяющиеся в замкнутых схемах управления
Для получения информации о скорости и положении вала двигателя в замкнутых цифровых ЭП применяются аналоговые и дискретные датчики скорости и положения.
Датчики скорости (тахогенераторы). Эти датчики предназначены для измерения скорости вращения вала двигателя или исполнительного органа рабочей машины. Они представляют собой специализированные электрические машины небольшой мощности, выходное .напряжение Uy^ которых пропорционально скорости вращения ю их якоря (ротора) U^=yo), где у – коэффициент пропорциональности. Основное требование к тахогенераторам заключается в максимальном приближении указанной зависимости ^вых^) к линейной, что определяет точность их работы.
По принципу своего действия и устройству та-хогенераторы бывают постоянного и переменного тока.
Тахогенераторы постоянного тока представляют собой небольшие генераторы постоянного
т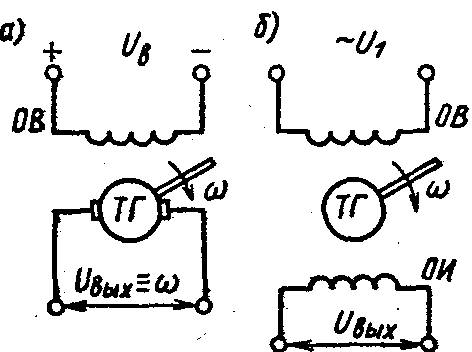 ока
с возбуждением от независимого источника
(рис. 11.16, а) или от постоянного магнита
(см. рис 10.7,6).
ока
с возбуждением от независимого источника
(рис. 11.16, а) или от постоянного магнита
(см. рис 10.7,6).
Т
Рис. 11.16. Тахогенератор постоянного (а)
и переменного (б) тока
Синхронные тахогенераторы представляют собой однофазный синхронный генератор весьма малой мощности. Он имеет ротор в виде многополюсного постоянного магнита. При его вращении созданное им магнитное поле пересекает витки обмотки статора, наводя в ней ЭДС, пропорциональную скорости вращения. Тем самым выходное напряжение на зажимах обмотки статора оказывается пропорциональным скорости ротора.
Особенностью работы синхронных тахогенерато-ров является зависимость частоты выходного напряжения от скорости.
Кроме рассмотренных выше аналоговых датчиков скорости в замкнутых схемах все пшре применяются цифровые датчики, сигналы которых могут непосредственно поступать в цифровые схемы управления. Применение таких датчиков позволяет повысить точность регулирования скорости исполнительных органов рабочих машин и механизмов.
Первичными элементами цифровых датчиков скорости и положения, непосредственно устанавливаемых на валу двигателя или рабочей машины, являются индукционные или фотоэлектрические элементы.
И
Рис. 11.17. Схема индукционного датчика
скорости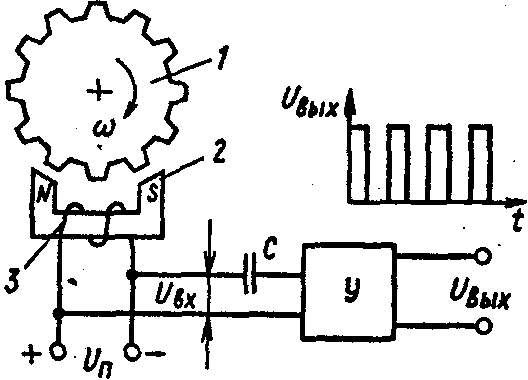
/=ю^/(2я),
где N – число зубцов диска, ю – скорость диска (вала двигателя).
Созданное этой ЭДС напряжение переменного тока U^ через конденсатор С подается на вход усилителя, который усиливает этот сигнал и формирует из него последовательность выходных прямоугольных импульсов, частота которых пропорциональна измеряемой скорости. Далее эти импульсы при помощи цифрового блока «частота – код», имеющегося, например, в УБСР-ДИ, преобразуются в двоичное число путем их подсчета за определенный интервал времени с запоминанием полученного числа на время последующего интервала. При необходимости этот переменный по частоте сигнал может быть преобразован и в напряжение постоянного тока (например, с помощью интегрирующего операционного усилителя) для использования в аналоговых схемах управления ЭП.
Датчики положения. Эти датчики применяются в замкнутых схемах управления ЭП и выполняются аналоговыми или цифровыми.
В
Рис.. 11.18. Схема вращающегося трансформатора
(в) и магнесина (б)
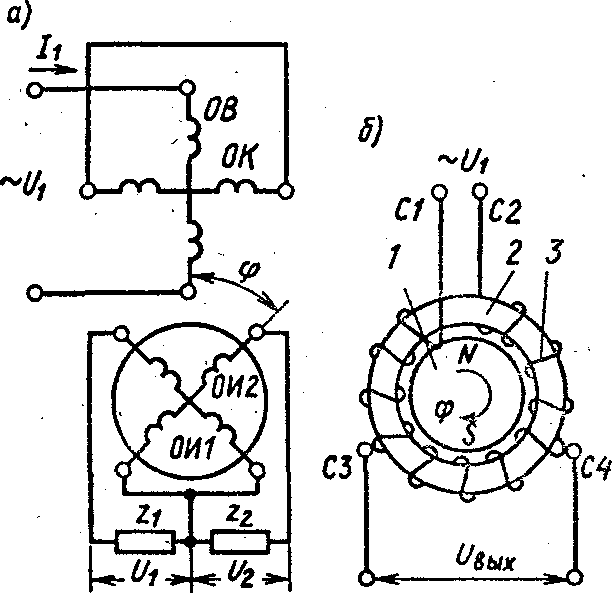
К обмотке возбуждения 0В подводится однофазное напряжение переменного тока U^. Протекающий под его действием ток создает в воздушном зазоре СКВТ магнитный поток, который наводит во вторичных (роторных) обмотках ' ЭДС. Величина ЭДС в обмотке ОИ1 (синусной) пропорциональна синусу, а в обмотке ОИ2 (косинусной) – косинусу угла ф поворота ротора . относительно статора. Напряжения U^ = U^^ sin (p и [/а = ^niaxcos Ф "а нагрузке z^ и :^ несут информацию об угле поворота ф вала двигателя или рабочей машины для ее использования в замкнутых по Положению схемах ЭП.
Компенсационная обмотка (ОК), которая обычно закорачивается накоротко, служит для компенсации вредного действия магнитного поля тока обмоток ротора и обеспечивает тем самым снижение погрешности вращающихся трансформаторов.
Помимо синусно-косинусных в замкнутых схемах ЭП применение находят линейные вращающиеся трансформаторы, у которых выходное напряжение обмотки ротора находится в прямой пропорциональности с углом (р.
Сельсин широко применяется в замкнутых схемах ЭП в качестве аналогового датчика положения. Он предоставляет собой электрическую машину малой мощности, которая обеспечивает преобразование угла поворота вала в электрический сигнал. Применение сельсина в качестве задающего устройства рассмотрено в §•11.3, а в качестве датчика положения и измерителя рассогласования следящего ЭП – в § 11.10.
Магнесин является бесконтактным электромеханическим датчиком угла поворота, имеет более простое по сравнению с сельсином и вращающимся трансформатором устройство, меньшие массу и габариты и характеризуется высокой точностью (до 2,5° и менее) измерения (рис. 11.18,6).
Магнесин имеет торроидальный сердечник 2 без пазов, на котором намотана спиральная обмотка 3. Обмотка имеет зажимы Cl, C2 для подключения ее к однофазной питающей сети переменного тока и выводы СЗ, С4, расположенные под углом 120° относительно друг друга для снятия выходного напряжения. Ротор магнесина представляет собой постоянный магнит 7 цилиндрической формы, со-единяемый с валом двигателя. При подаче на зажимы С], C2 обмотки 3 напряжения питания U^ на выводах СЗ, С4 обмотки появится выходное напряжение Душ, пропорциональное углу поворота ротора магнесина (р. Далее это напряжение поступает в схему управления ЭП.
Индуктосин используется для измерения линейных перемещений механических элементов ЭП или исполнительных органов рабочих машин. По своему устройству он напоминает линейный асинхронный двигатель и имеет плоские статор и подвижный ;ююр. Первичная обмотка, расположенная на ста-чоре, подключается к однофазной сети неременного тока, при этом на вторичной обмотке при перемещении ротора будет наводиться ЭДС, зависящая от его положения. Точность индуктосинов может достигать несколько микрометров.
Цифровой фотоэлектрический датчик положения (рис. 11.19) состоит из первичного элемента, представляющего собой кодирующий диск (рис. 11.19, а), соединяемый с валом двигателя или рабочей машины. Он имеет несколько концентрических
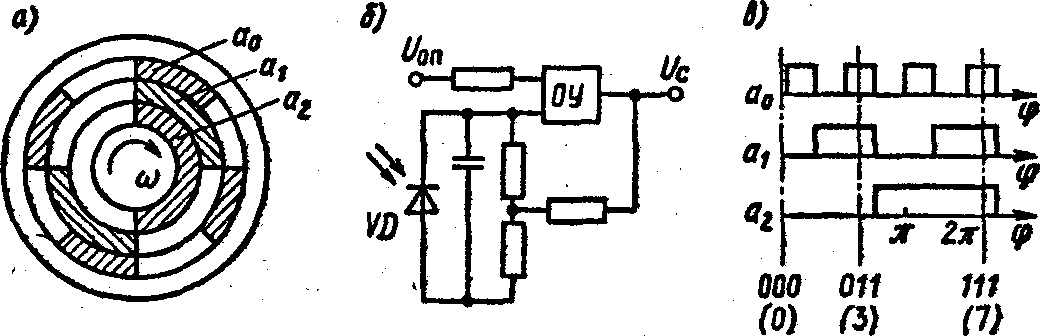
Рис. 11.19. Цифровой датчик положения: кодовый диск (в), схема одного канала (б) цифрового датчика положения и диаграмма работы (в)
колец (дорожек), каждое из которых состоит из сегментообразных прозрачных и непрозрачных участков. Кольцо с наименьшим радиусом (т. е. расположенное ближе всего к оси диска) имеет два участка – прозрачный и непрозрачный, и относится к старшему разряду выходного числа. В каждом следующем от центра кольце число участков удваивается, что соответствует в двоичном представлении чисел переход к следующему разряду. Диск, показанный на рис. 11.19, а, имеет .три таких кольца, что позволяет сформировать с его помощью трехразрядное двоичное число.
Получение электрического сигнала производится фотоэлектрическим способом. Для этого по одну сторону диска устанавливаются по числу колец источники света – светодиоды, а по другую сторону – приемники света – фотодиоды. Когда между ними -находится прозрачный участок диска, светодиод освещает фотодиод, электрическое сопротивление последнего резко изменяется, что и является входным воздействием, для последующей схемы датчика положения.
Один канал датчика положения, соответствующий одному разряду, показан на рис. 11.19,6. Фотодиод VD включен на вход операционного усилителя ОУ, работающего в режиме релейного элемента. В исходном положении он «закрыт» отрицательным опорным напряжением Uyy, при освещении фотодиода VD усилитель «открывается» и на его выходе появляется электрический сигнал, соответствующий 1 двоичного числа. Количество таких усилителей соответствует разрядности датчика положения.
Любому положению кодового диска в пределах 360° (одного оборота) соответствует однозначное сочетание нулей и единиц на выходах усилителей, т. е. определенное числовое выражение угла. Это положение для рассматриваемого трехразрядного датчика иллюстрируется диаграммой рис. 11.19, в, из которой видно, что. при повороте диска на угол 2л =360° имеет место восемь комбинаций выходов усилителей от 000 до 111. Это соответствует изменению числа в десятично^ системе от 0 до 7.
Из диаграммы рис. 11.19, в также видно, что выход датчика положения изменяется через каждые 45°=я/4, что определяет его дискретность (точность). В общем случае дискретность цифрового датчика положения определяется выражением Д(р=360°/2", где п – число его разрядов.
Для повышения точности цифровых датчиков положения применяются несколько кодовых дисков, соединяемых с валом двигателя через редуктор.
Кроме фотоэлектрических первичньгх элементов в датчиках положения используются индуктивные датчики с индуктосинами, позволяющие получать более высокие характеристики по точности. Разрешающая способность таких датчиков, характеризующая его точность, определяется выражением А(р=3б0°/(/?2"), где;? – число пар полюсов индуктоси-на. Поскольку это число может составлять несколько сотен, то может быть обеспечена точность в несколько единиц или десятков единиц угловых секунд.
В цифровых системах управления ЭП распространение получили импульсные датчики типов ПДФ-3 и ДИФ-5. Первый из них имеет выходной сигнал в виде двух серий импульсов, сдвинутых друг относительно друга на четверть периода. Число импульсов на оборот составляет 600. Датчик типа ДИФ-5 имеет различные модификации и позволяет получать за один оборот вала датчика от 45 до 1800 импульсов.
В последнее время в замкнутых схемах ЭП применяются комплексные датчики скорости и положения вала двигателя. К ним относятся датчики ПДФ-8 и ПДФ-9, включающие в себя датчик скорости (бесконтактный тахогенератор постоянного тока) и фотоимпульсный датчик положения ротора, выдающий от 125 до 2500 импульсов на один оборот вала. Такие датчики применяются, в частности, в ЭП типов ЭПБ-1 и ЭПБ-2 с вентильными двигателями.