

9.5 Динамика магнитного поля сенсора
Динамика магнитного поля магнитожидкостного сенсора отличается от динамики поля управляющих катушек, хотя и зависит от него. Отличие заключается в распределении поля при нарастании тока в управляющих катушках и при убывании тока. Магнитная индукция управляющих катушек в каждой точке растет вместе с током линейно. Поле сенсора, напротив, изменяется нелинейно. При линейном увеличении тока происходит нелинейное намагничивание магнитной жидкости (насыщение), что проявляется как более медленное увеличение поля при увеличении тока.
Магнитное поле сенсора, строго говоря, нельзя рассматривать отдельно от поля катушек, так как они взаимосвязаны. Динамика поля ГЭПП (суммарное поле) при первоначальном намагничивании показана на рисунке 18. Каждый кадр отличается током в управляющих катушках (1, 5, 10, 15, 20, 25 мА).





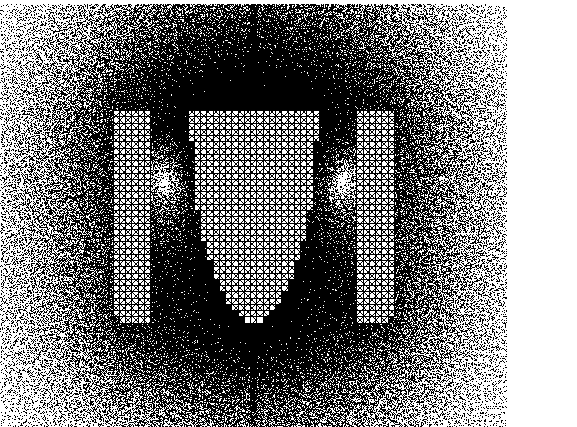
Рисунок 18 – Динамика магнитного поля сенсора
При снижении управляющего тока и дальнейшем нарастании происходит перемагничивание магнитожидкостного сенсора по петле гистерезиса, то есть при переходе управляющего тока через нуль поле катушек равно нулю, а поле магнитожидкостного сенсора отличается от нуля. При увеличении тока до некоторого значения происходит уменьшение поля сенсора до нуля, но поле управляющих катушек не равно нулю.
10 Расчет сил взаимодействия полей
Суперпозиция поле определяет суммарное поле катушек и магнитожидкостного сенсора. При этом поле катушек является первичным, а поле сенсора – вторичным. Поле управляющих катушек воздействует на сенсор и является определяющим фактором для собственного поля сенсора.
Кроме изменения магнитного поля сенсора, управляющие катушки оказывают силовое воздействие на магнитожидкостный сенсор. Так как ток в катушках, а, следовательно, и создаваемое ими поле имеют различное направление в разные моменты времени (ток в катушках переменный), то и сила, действующая на сенсор, будет различной в разные моменты времени.
Универсальным методом для определения объемной электромагнитной силы является нахождения градиента магнитного поля. Там, где магнитное поле изменяется наиболее резко, действует большая сила, а в точках, где поле изменяется плавно, сила меньше. Этот метод требует определения индукции в каждой точке и последующего вычисления полного дифференциала и является трудоемким.
Существует простая зависимость, показывающая действие магнитного поля на проводник с током – формула (7). Однако для определения силы по этой формуле должен быть проводник с током, помещенный в магнитное поле. Магнитная жидкость обладает малой электропроводностью, то есть токи в ней не протекают. Однако, в расчетном смысле магнитожидкостный сенсор можно заменить совокупностью круговых токов, как уже было показано в предыдущем разделе.
Таким образом, появляется возможность для быстрого вычисления сил, действующих на каждый круговой ток, путем замены тока в формуле (7) на эквивалентный ток, вычисленный по формуле (49).
Покажем на рисунке 19 направления сил, действующих на проводник с током.

Рисунок 19 – Направление силы и магнитной индукции
Подставляя формулу (49) в (7), получим:
![]() (51)
(51)
где dl – элементарный отрезок проводника с током;
B – вектор магнитной индукции, действующий со стороны катушек;
b – толщина элементарного диска (при разбиении эллипса).
Ф ормула
(51) показывает величину и направление
вектора силы, действующей со стороны
управляющих катушек на элементарный
отрезок эквивалентного тока. Согласно
рисунку 19, сила действует перпендикулярно
току и вектору магнитной индукции.
Покажем на рисунке 20 силы, действующие
на кольцевой проводник.
ормула
(51) показывает величину и направление
вектора силы, действующей со стороны
управляющих катушек на элементарный
отрезок эквивалентного тока. Согласно
рисунку 19, сила действует перпендикулярно
току и вектору магнитной индукции.
Покажем на рисунке 20 силы, действующие
на кольцевой проводник.
Рисунок 20 – Силы, действующие на кольцевой проводник
Силу, действующую на каждый элементарный отрезок, в текущей системе координат (цилиндрической) можно разложить на две проекции: радиальную FR и осевую FZ. При этом осевая составляющая силы определяется радиальной составляющей магнитной индукции, а радиальная составляющая силы – осевой составляющей индукции. Сила будет распределена по всему объему сенсора, и радиальные составляющие сил будут растягивать или сжимать сенсор, а осевые составляющие вызывают осевое смещение сенсора вверх или вниз в зависимости от направления тока в управляющих катушках. Для определения суммарной радиальной и осевой составляющих сил для каждого элементарного диска, следует формулу (51) умножить на длину кольцевого проводника с эквивалентным током, то есть на πD (D – диаметр диска).
Таким образом, осевые и радиальные составляющие сил для элементарного диска будут иметь вид:
![]() (52)
(52)
![]() (53)
(53)
Так как для определения эквивалентного тока магнитожидкостный сенсор эллиптической формы разбивался на элементарные диски, то для определения суммарных значений радиальной и осевой составляющих сил (действующих на весь сенсор в целом) нужно сложить FZ и FR (соответственно) для каждого диска, вычисленные по формулам (52) и (53).
Радиальная составляющая силы будет растягивать или сжимать сенсор, она равномерно распределена по окружности сенсора. Осевая составляющая будет смещать сенсор вверх или вниз, при этом ее можно считать приложенной к центру сенсора. Для отображения действующих сил используем отрезки прямых, длина которых показывает модуль силы, а направление отрезка соответствует направлению силы. Силы, действующие на каждый элементарный диск, условно изобразим приложенными к поверхности сенсора (реально сила – распределенная). Осевую и радиальную составляющие суммарной силы отобразим раздельно и приложенными к центру сенсора в верхней части.

Рисунок 21 – Направления действующих сил
Синим цветом показаны силы, действующие на каждый элементарный диск, красным – радиальная составляющая суммарной силы, зеленым – осевая составляющая суммарной силы.
Как видно из рисунка, наибольшее значение силы приходится на середину сенсора. Силы на рисунке 21 вычислены при токе в катушках 25 мА, при этом максимальное значение индукции 497,5 мкТл, радиальная составляющая силы равна 1,2 Н, осевая составляющая: -0,065 Н. При заданном направлении тока (при котором индукция внутри катушки направлена вниз) поле катушек будет растягивать сенсор с силой 1,2 Н (распределенной) и выталкивать с силой 0,065 Н.
При изменении направления тока в катушках поле катушек будет сжимать и втягивать сенсор.
Сравним два варианта сенсора для определения действующих сил и выбора наиболее оптимального. На рисунке 21 было показано распределение и величины сил для первого варианта. Распределение сил для второго варианта показано на рисунке 22.

Рисунок 22 – Направления сил (вариант 2)
Рисунок 22 построен при токе в управляющих катушках 25 мА, при этом максимальное значение индукции равно 635 мкТл, радиальная составляющая суммарной силы 2,2 Н, осевая составляющая (распределенная): -0,315 Н.
Сравнивая рисунки, можно видеть, что во втором случае радиальная составляющая почти вдвое больше, а осевая составляющая больше в 4,8 раза.
Учитывая, что большая сила дает большее перемещение, а более высокий уровень магнитной индукции увеличивает уровень помех от устройства и большее потребление энергии, то целесообразно выбрать первый вариант сенсора.