

Глава 19
СПЕЦИАЛЬНЫЕ ВИДЫ РЕЛЕ
§ 19.1. Типы специальных реле
Наибольшее распространение в системах автоматики получили реле электромагнитного типа, рассмотренные в пя. 17 и 18. Однако на-ходят ярименение и электрические рек других типов, в которых тягово* уеияи^ неофгодимве для аересмочемия контактов, создается не е помощью электромагнита. Сюда относятся прежде всегореле, аналогичные по принципу действия электроизмерительным приборам различных систем: магнитоэлектрической, электродинамической, индукционной. Если в электроизмерительном приборе подвижная часгь перемещает по шкале стрелку или какой-либо указатель, то в реле соответствующего типа подвижная часть перемещает контакты.
Для получения значительных выдержек времени при замыкании и размыкании контактов используются специальные реле времени', некоторые из них имеют в основе электромагнитный механизм, но с добавлением различных устройств, обеспечивающих задержку срабатывания или отпускания.
Для автоматизации процессов нагрева и охлаждения применяются электротермические реле, в которых переключение электрических контактов обеспечивается температурной деформацией металлов или температурным расширением жидкостей и газов.
В системах автоматической защиты оборудования от аварийных режимов используются специальные реле, срабатывающие при определенном значении тока, напряжения, скорости, момента, давления и других параметров.
§ 19.2. Магнитоэлектрические реле
Принцип действия магнитоэлектрического реле основан на взаимодействии магнитного поля постоянного магнита с током, протекающим по обмотке, выполненной в виде поворотной рамки.
Магнитоэлектрическое реле (рис. 19.1) состоит из постоянного магнита /, между полюсными наконечниками которого находится цилиндрический стальной сердечник 2. В кольцевом зазоре между полюсными наконечниками и сердечником создается равномерное радиально направленное магнитное поле. В зазоре размещена легкая алюминиевая рамка 3 с обмоткой из тонкого провода, к которой подводится ток по спиральным пружинам из фосфористой или оловянно-цинковой бронзы. Эти пружины создают противодействующий момент, стре
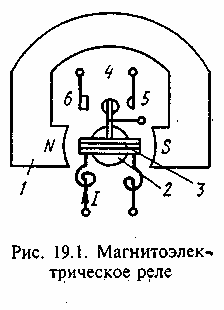
мящийся установить рамку с обмоткой таким образом, чтобы ее плоскость была направлена по оси полюсов магнита 1. При пропускании тока / по обмотке реле на рамку с обмоткой действует вращающий момент, заставляющий ее поворачиваться вокруг оси в направлении, определяемом полярностью тока. Жестко закрепленный на рамке подвижный контакт 4 замыкается с одним из неподвижных контактов 5 или 6.
Сила, действующая на проводник длиной /, обтекаемый током / и помещенный в магнитное поле с индукцией Д, определяется на основании закона Ампера:
![]()
из уравнения (1У.З) видно, что при неизменных

В то же время противодействующий момент, создаваемый закручивающимися токоподводящими пружинами, пропорционален углу закрутки, т. е. углу поворота рамки. Поскольку направление поворота рамки определяется направлением тока в обмотке, магнитоэлектрическое реле является поляризованным и может быть выполнено трехпозиционным.
По сравнению с другими электромеханическими реле магнитоэлектрическое реле является наиболее чувствительным, оно срабатывает при мощности управления в доли милливатта. Усилие на контактах магнитоэлектрического реле невелико (порядка 1(Г2 Н и меньше), поэтому для повышения надежности контакты выполняются из платины и платиноиридиевого сплава. При резком изменении усилия маломощные контакты быстро изнашиваются, поэтому магнитоэлектрические реле используются обычно в схемах, где сигнал постоянного тока изменяется медленно. Недостатком магнитоэлектрических реле является сравнительно большое время срабатывания (0,1—0,2 с). По своему быстродействию они уступают нейтральным электромагнитным реле.