

§ 21.5. Электромагнитные муфты
Электромагнитная муфта предназначена для передачи вращающего момента двигателя к рабочему механизму. Муфта состоит из двух частей: ведущей и ведомой, которые образуют замкнутую магнитную систему. Муфта выполнена из ферромагнитных материалов и имеет одну или несколько обмоток возбуждения.
Различают фрикционные муфты и асинхронные (индукционные) муфты. Во фрикционных муфтах передача вращения происходит за счет силы трения между ведущей частью, закрепленной на валу электродвигателя, и ведомой частью, которая может перемещаться вдоль вала рабочего механизма на шлицах или шпонке. При подаче тока в обмотку возбуждения создается магнитодвижущая сила и подвижная часть муфты прижимается к неподвижной. Такая муфта работает как электромагнит. Для передачи значительных моментов используются многодисковые конструкции электромагнитных муфт. Как на ведущем, так и на ведомом валу имеется несколько стальных дисков, которые под действием МДС притягиваются друг к другу и благодаря трению их поверхностей передается вращение. Соприкасающиеся поверхности фрикционных муфт выполняют из специального материала — сплава феррадо, имеющего коэффициент трения в 3—4 раза больший, чем у стали.
Различают конструкции электромагнитных фрикционных муфт с неподвижной катушкой электромагнита и с вращающейся катушкой.
В маломощных муфтах (рис. 21.6, а) ведущая 1 и ведомая 2 полумуфты не имеют обмоток, но одна из них (обычно ведомая) может перемещаться вдоль вала по шпонке или шлицам. Обе муфты окружены неподвижной катушкой электромагнита 3, которая при подключении к напряжению создает магнитный поток. Возникающие электромагнитные силы прижимают ведомую полумуфту к ведущей. Момент трения между полумуфтами должен быть больше момента нагрузки на ведомом валу. При отключении катушки муфты неподвижная полумуфта отжимается от подвижной с помощью пружины (на рисунке не показана). Обычно эта же пружина прижимает полумуфту к тормозным поверхностям, что обеспечивает быструю остановку ведомого вала. В мощных муфтах (рис. 21.6^ б) для увеличения величины передаваемого момента в подвижной части муфты используется несколько стальных дисков 2, имеющих свобо-
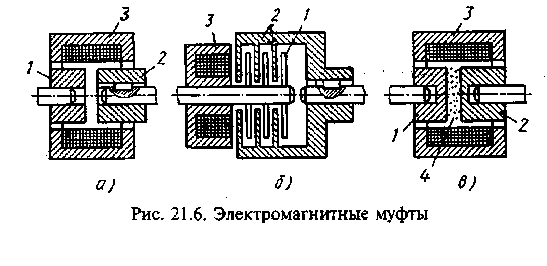
ду перемещения вдоль оси вращения ведущего и ведомого валов. Соответствующее количество стальных дисков 1 жестко закреплено на ведущем валу. На этом же валу закреплена катушка электромагнита 3, подача тока к которой осуществляется с помощью контактных колец и щеток. Электромагнитные силы притягивают подвижные диски к неподвижным. Большая площадь соприкосновения обеспечивает большой момент трения.
В электромагнитных муфтах с ферромагнитным наполнителем (рис. 21.6, в) передача вращения осуществляется за счет того, что зазор между ведомой 1 и ведущей 2 полумуфтами заполнен смесью 4 из зерен ферромагнитного материала и наполнителя. При пропускании тока через катушку 3 муфты создается магнитный поток, заставляющий ферромагнитные зерна ориентироваться вдоль силовых линий и образовывать мостики, связывающие ведущую и ведомую полумуфты. Зерна ферромагнитного материала имеют размеры от 4 до 50 мкм. Наполнитель может быть сухим (тальк, графит) или жидким (трансформаторные и силиконовые масла, фтористые соединения). Электромагнитные муфты с ферромагнитным наполнителем более надежны, чем фрикционные, имеют меньшее время срабатывания (до 20 мс). Необходима регулярная смена наполнителя.
В электромагнитных индукционных муфтах передача вращающего момента происходит за счет индукционных токов, т. е. без непосредственного механического соприкосновения обеих частей муфты. Одна из частей муфты (рис. 21.7) имеет электромагнитные полюсы / с обмоткой возбуждения, питаемой постоянным током. Она называется индуктором и конструктивно выполнена подобно ротору синхронного генератора. Другая часть муфты имеет коротко-замкнутую обмотку 2, аналогичную роторной обмотке асинхронного двигателя. Эта часть называется якорем. При вращении индуктора в обмотке якоря наводится ЭДС и идет ток. Взаимодействие этого тока с магнитным потоком возбуждения создает электромагнитный момент, приводящий во вращение якорь. В муфте происходят те же физические процессы, что и в асинхронном электродвигателе. Раз-

ница заключается в том, что вращение магнитного поля в двигателе происходит при подаче трехфазного переменного тока в обмотку неподвижного статора, а в муфте вращение магнитного поля происходит за счет механического вращения индуктора, возбужденного постоянным током. Так же как и в асинхронном двигателе, вращающий момент возникает лишь при неодинаковой скорости индуктора и якоря. Ведомая часть муфты вращается с частотой n2 = «i(l - s), где /г, — частота вращения ведущего вала, 5 — скольжение. Величина скольжения обычно составляет 0,03—0,05.
Если момент нагрузки приводного механизма оказывается больше максимального момента муфты, то происходит опрокидывание-вращение ведомой части прекращается. Благодаря способности к опрокидыванию муфта может защитить приводной двигатель от больших перегрузок. Величина вращающего момента, передаваемого муфтой, зависит от магнитного поля возбуждения. Изменяя ток возбуждения, можно регулировать величину критического момента муфты. Разница в скоростях вращения ведомой и ведущей частей асинхронной муфты принципиально необходима для создания вращающего момента на ведомой части. Поэтому асинхронные муфты называют еще электромагнитными муфтами скольжения. Они получили наибольшее распространение в качестве элемента регулируемого автоматизированного электропривода переменного тока, включающего помимо муфты нерегулируемый электродвигатель и систему автоматического регулирования тока возбуждения муфты. К достоинствам такого привода с муфтой скольжения относятся простота устройства и эксплуатации, низкая стоимость, высокая надежность. Но с увеличением скольжения растут потери мощности и КПД привода снижается.
Контрольные вопросы