

§ 21.4. Особенности расчета электромагнитов переменного тока
В электромагнитах переменного тока индукция в магнитной цепи изменяется по синусоидальному закону. Так как максимальное (амплитудное) значение индукции в V2 раз больше действующего значения, а величина тягового усилия пропорциональна квадрату индукции, то электромагнит переменного тока при одинаковой степени насыщения магнитопровода развивает в два раза меньшее значение тягового усилия. Поэтому при определении конструктивного фактора для электромагнита переменного тока принимается удвоенное значение тягового усилия:
Оптимальные соотношения между высотой и шириной обмоточного пространства катушки t = h/a получаются меньшими, чем для электромагнитов постоянного тока. Поэтому катушки электромагнитов переменного тока будут короче и толще. Более короткая катушка уменьшает длину сердечника и его объем, что приводит к снижению потерь в стали, вызванных гистерезисом и вихревыми токами. Этих потерь не было в электромагнитах постоянного тока. Там стремились к уменьшению потерь в меди, что обеспечивалось уменьшением средней длины витка катушки за счет малой ее толщины. В электромагнитах переменного тока надо стремиться к уменьшению суммарных потерь (и в меди, и в стали).
![]()
Диаметр провода определяется по допустимой с точки зрения нагрева плотности тока. При этом ток определяется с учетом потерь в стали: ____
где /п — ток потерь в стали; 1Ц — ток намагничивания.
Значения /п и /м можно определить с помощью электрической схемы замещения электромагнита (рис. 21.4). На схеме приняты следующие обозначения: R — активное сопротивление обмотки; Хр — индуктивное сопротивление, соответствующее рабочему потоку; X — индуктивное сопротивление, соответствующее потоку рассеяния; Л„ — активное сопротивление, обусловленное потерями в магнитопроводе на гистерезис и вихревые токи.
Если пренебречь падением напряжения на активном сопротивлении обмотки R и потоком рассеяния, то ток потерь
![]()
![]()

Намагничивающий ток, создающий рабочий магнитный поток, определяется по МДС (fw). Если пренебречь падением МДС в стали и нерабочих зазорах, то
где Ф6 — действующее значение переменного магнитного потока в рабочем зазоре; С6 — магнитная проводимость рабочего зазора.
Предварительный расчет электромагнита с 'короткозамкнутым витком проводится без учета экранирующего
действия этого витка. Точный расчет параметров короткозамкнутого витка довольно сложен. На практике его выполняют из меди или латуни таким образом, чтобы он охватывал примерно 3/4 полюса электромагнита. При Ш-образном магнитопроводе короткозамкну-тый виток 3 располагается на среднем (рис. 21.5, а) или на крайних стержнях (рис. 21.5, 6). С витком на среднем стержне выполнены широко распространенные электромагниты серии МИС. Для уменьшения падения МДС в нерабочем зазоре между якорем 1 и сердечником 2 имеется так называемый воротничок 5. Номинальное тяговое усилие электромагнитов серии МИС изменяется от 15 до 120 Н при ходе якоря 15—30 мм. Механическая износостойкость составляет примерно 10б циклов включений-отключений.
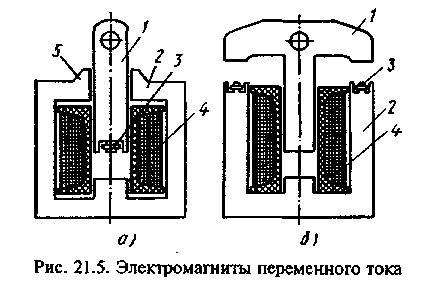
С витками на крайних стержнях (рис. 21.5, б) выполнены длин-ноходовые электромагниты серии ЭД. Они имеют Т-образный якорь /. Тяговое усилие создается во всех трех стержнях, т. е. магнитная цепь содержит три рабочих зазора. Тяговое усилие электромагнитов серии ЭД достигает 250 Н при максимальном перемещении якоря до 40 мм. Электромагниты срабатывают при подаче тока в обмотку 4.