

§ 26.6. Назначение и принцип действия бесконтактных магнитных реле
Бесконтактные магнитные реле предназначены для включения различных устройств при подаче управляющего сигнала. Таким образом, они нужны для тех же целей, что и обычные электромагнитные реле. Но если включение нагрузки с помощью электромагнитных реле происходит за счет замыкания электрических контактов, то в бесконтактных реле включение нагрузки происходит за счет значительного и очень быстрого изменения сопротивления. Следовательно, включение и отключение происходят без разрыва цепи и соответственно без связанных с таким разрывом последствий: искрения, дугообразования, окисления и износа контактов.
Основным достоинством бесконтактных реле является высокая надежность, которая обусловлена именно отсутствием контактов и подвижных частей. Кроме того, надо отметить и другие преимущества бесконтактных реле перед контактными: возможность эксплуатации во взрывоопасных и запыленных помещениях, в условиях повышенной влажности и химически агрессивных паров; стабильность параметров срабатывания и отпускания при наличии вибрации, ударных нагрузок, невесомости, при изменении пространственного положения; простота эксплуатации, высокая чувст^ вительность.
Принцип действия бесконтактного магнитного реле основан на использовании в магнитном усилителе положительной обратной связи с kq,. > 1. В § 23.6 было рассмотрено построение характеристи-

Для получения больших значений К^ в схемах с внутренней обратной связью вводится дополнительно и специальная обмотка обратной связи. Схемы с внешней и внутренней обратной связью называются схемами со смешанной обратной связью. Они наиболее рациональны в конструктивном отношении, поскольку позволяют снизить число витков обмотки обратной связи, а следовательно, уменьшить габариты и упростить изготовление бесконтактного магнитного реле.
Надо отметить, что бесконтактные реле строятся не только на базе магнитного усилителя с положительной обратной связью. Они могут быть созданы и на базе полупроводниковых элементов, в первую очередь транзисторов и тиристоров.
§ 26.7. Характеристики и схемы бесконтактных магнитных реле
Выполним графическое построение характеристики бесконтактного магнитного реле с помощью метода, рассмотренного в § 23.6.
Прежде всего строим характеристику магнитного усилителя без обратной связи, откладывая по оси абсцисс напряженность управляющего поля Ну (и соответствующее ей значение тока управления /у) и по Ьси ординат напряженность H_ср (и соответствующее ей значение тбка нагрузки IH ). Для идеального магнитного усилителя Н^.р = Ну, поэтому линейный участок характеристики 1 на рис. 26.7 имеет угол наклона к оси ординат 45°. На этом же графике строим характеристику обратной связи, представляющую собой прямую 2, ПровеДейиую пё Отношению к оси ординат под углом a = arctg Koc
Так как мы проводим Построениемдля" случай Koc > 1, то a> 45° и прямая 2 проходит ниже1 линейного участка характеристики 7. Пересечение характеристики 1 и прямой 2 дает значение тока нагрузки при 1у = 0. Затем проводим несколько гфямых, параллельных прямой 1 из различных точек, соответствующих Новым значениям /у < 0. Обратите внимание, что при этом пересечение происходит не
в одной, а в двух и даже трех точках. Теоретически характеристика IH =f(Iу) имеет 5-образную форму. Часть этой характеристики (участок бв на рис. 26.7) показана пунктиром. Работа усилителя на этом участке невозможна, поскольку электрическая цепь находится в неустойчивом режиме. Реальная характеристика /н =/(/у) показана сплошной линией. При постепенном изменении управляющего сигнала (начиная с больших отрицательных значений .-/у) в сторону увеличения (абсолютное значение тока при этом уменьшается) ток в нагрузке сначала плавно изменяется до точки в. Дальнейшее изменение тока /у в этом же направлении приводит к скачкообразному изменению тока: переход из точки в в точку а. Затем снова происходит плавное незначительное изменение тока нагрузки: участок характеристики правее точки а.
При изменении управляющего тока в противоположном направлении (от положительных значений /у до отрицательных) ток нагрузки сначала плавно изменяется до точки б, в которой происходит скачок к минимальному значению в точке г. В результате характеристика получает вид, как у поляризованного реле с размыкающим контактом. Максимальное значение тока /н соответствует замыканию контакта, а минимальное значение тока нагрузки — размыканию контакта. В обычном контактном реле это минимальное значение тока нагрузки естественно равно нулю.
Схемы бесконтактных магнитных реле со смещением показаны на рис. 26.8, а, б. В схеме по рис. 26.8, а обмотка смещения питается от самостоятельного источника питания. На практике благодаря смещению можно получить разный вид характеристик бесконтактного реле (рис. 26.8, в).
Если сместить характеристику вправо таким образом, чтобы ось ординат проходила посередине петли гистерезиса этой характеристики (рис. 26.8, в), то бесконтактное магнитное реле может вьрюлнять роль триггера, т. е. запоминающего устройства. При /у = О реле имеет два устойчивых состояния (точки о и б на рис. 26.8, в). Реле будет на- . холиться в том состоянии, в котором оно находилось до снятия управляющего сигнала /у. Если раньше ток управления был отрицательным, то состояние реле определяется точкой а (минимальный ток нагрузки). Если раньше ток управления был положительным, то
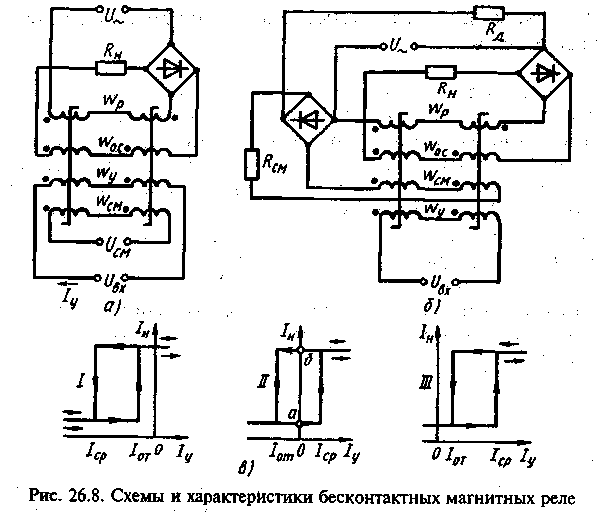
состояние реле определяется точкой 6 (максимальный ток нагрузки). Значит, такое реле «запоминает» свое предыдущее состояние.
Правда, если временно будет отключено напряжение питания, то после его повторного включения состояние реле будет неопределенным (а или б). Оно обусловлено случайными причинами: неидентичностью сердечников и обмоток.
В схеме по рис. 26.8, б обмотка смещения питается выпрямленным током от того же источника, что и рабочая обмотка. Этим обеспечивается стабилизация тока срабатывания при колебаниях напряжения питания.
Для основных параметров бесконтактного магнитного реле приняты те же термины, что и для обычных контактных реле. Ток управления, при котором ток нагрузки изменяется скачком от минимального до максимального значения, называют током срабатывания. Соответственно ток управления, при котором ток нагрузки скачком уменьшается, называют током отпускания.
Недостатками бесконтактных магнитных реле являются следующие их отличия от обычных реле: переключение происходит лишь в одной цепи (заменяется как бы только одна пара контактов), минимальный ток отличен от нуля.