

1. Зачем в магнитных усилителях используется обратная связь?
2. В чем разница между внешней и внутренней обратной связью?
3. Как регулируется коэффициент обратной связи?
Глава 24
РЕВЕРСИВНЫЕ МАГНИТНЫЕ УСИЛИТЕЛИ
§ 24.1. Статическая характеристика реверсивного (двухтактного) магнитного усилителя
Реверсивные магнитные усилители отличаются тем, что при изменении полярности входного сигнала (тока управления) изменяется полярность выходного сигнала (тока нагрузки). Реверсивные магнитные усилители могут питать нагрузку постоянного или переменного тока. В последнем случае в зависимости от полярности тока управления изменяется на 180° фаза выходного напряжения. Статическая характеристика реверсивного магнитного усилителя показана на рис. 24.1. Она представляет собой симметричную кривую, проходящую через начало координат. Таким образом, при отсутствии управляющего сигнала (/у = 0) ток в нагрузке /н также равен нулю. Напомним, что в нереверсивных (однотактных) магнитных усилителях при /у = О через нагрузку проходит ток холостого хода /„о, для уменьшения которого используют, например, смещение.
Соответствующую статическую характеристику реверсивного магнитного усилителя можно получить, если соединить два одинаковых
нереверсивных усилителя таким образом, чтобы они действовали на общую нагрузку встречно при общем управляющем сигнале. На рис! 24.2 показаны две характеристики {1 и 2) однотактных магнитных усилителей со смещением и без обратной связи. При встречном включении таких усилителей их результирующая статическая характеристика получается графически сложением кривых / и 2. Для того чтобы ток нагрузки при /у = 0 был равен нулю, необходима идентичность характеристик магнитных усилителей, составляющих реверсивный магнитный усилитель. Однотактные магнитные усилители, на основе которых выполняется реверсивный магнитный усилитель, могут быть включены по дифференциальной или мостовой схеме. Напомним, что аналогичным способом обеспечивалась реверсивная характеристика в различных преобразователях, рассмотренных в разделе II. Различают реверсивные магнитные усилители с выходным постоянным и переменным током, с обратными связями и без них. Так как реверсивный магнитный усилитель состоит из двух однотактных усилителей, то он имеет четыре сердечника, но разработаны схемы и с уменьшенным числом сердечников.
§ 24.2. Усилители с выходным переменным током
Дифференциальная схема реверсивного магнитного усилителя без обратной связи показана на рис. 24.3. Два одинаковых однотактных усилителя МУ1 и МУ2 с последовательно соединенными рабочими обмотками питаются от вторичной обмотки дифференциального трансформатора Тр. Нагрузка ZH включена между средними точками вторичной обмотки трансформатора Тр и рабочих обмоток усилителей МУ1 и МУ2. Применяя принцип наложения, можно рассматривать ток через нагрузку как разность двух токов: /, и /2. При отсутствии входного сигнала (/у = 0) токи /, и /2 должны быть равны. Они определяются смещением, т. е. начальным подмагничиванием за счет постоянного тока, протекающего по обмоткам смещения шсы: Для балансировки (установки нуля) реверсивного усилителя при /у = О служит регулировочный резистор R^T. Дело в том, что изготовить два однотактных магнитных усилителя с абсолютно одинаковыми характеристиками практически невозможно, поэтому путем

регулировки смещения обеспечивают равенство токов /, и /2 при /у = 0. Обычно не удается добиться одновременно равенства и амплитуды и фаз этих токов, поэтому даже при /у = 0 по нагрузке проходит ток небаланса (/„ * 0).
Обмотки смещения и управления однотактных усилителей МУ1 и МУ2 включены таким образом, что при подаче управляющего сигнала /у в одном усилителе напряженности поля управления и смещения складываются, а в другом — вычитаются. В итоге ток /, одного усилителя возрастает, а ток /2 другого усилителя уменьшается и в нагрузке появляется ток /н - /,'- /2. При перемене полярности тока управления магнитные усилители как бы меняются местами: /, уменьшается, а /2 возрастает. В итоге фаза выходного тока /н = /, - /2 изменяется на 180°. Следует обратить внимание на то, что, поскольку речь идет о переменных токах, ток нагрузки фактически представляет собой не алгебраическую, а геометрическую (векторную) разность.
Заметим, что короткозамкнущй контур, создаваемый обмотками смещения (как и любой другой обмоткой), увеличивает инерционность усилителя, т. е. затягивает продолжительность переходного процесса. Для того чтобы уменьшить это вредное влияние, сопротивление контура увеличивают за счет дополнительных постоянных сопротивлений R.
Существенным недостатком дифференциальной схемы реверсивного усилителя по рис. 24:3 является наличие трансформатора
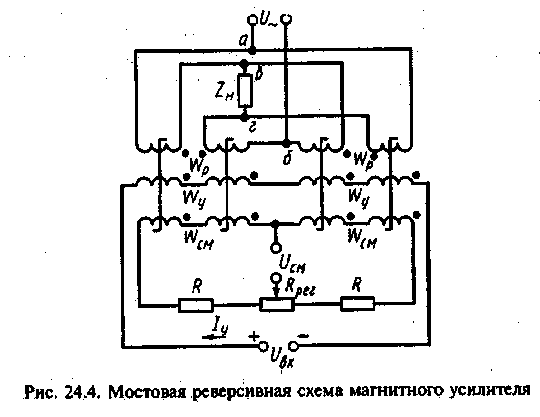
Тр. От этого недостатка свободна мостовая схема реверсивного усилителя.
Данная схема также содержит четыре сердечника, причем об-Мотки управления и смещения выполняются так же, как и в дифференциальной схеме, а рабочие обмотки шр соединяются в схему моста, как показано на рис. 24.4. В одну диагональ моста (между точками с и б) подводится напряжение источника питания U~, а в другую диагональ моста (между точками виг) включается нагрузка ZH. При отсутствии тока управления (7у = 0) индуктивные сопротивления всех рабочих обмоток wp одинаковы и мост уравновешен, т. е. ток в цепи нагрузки отсутствует (/„ = 0). Так же как и в дифференциальной схеме, при подаче управляющего сигнала (/у * 0) подмагничива-ющее поле обмоток управления складывается с полем обмоток смещения в одной паре сердечников, а в другой паре — вычитается из него. Таким образом, индуктивное сопротивление одной пары рабочих обмоток, включенных в противоположные плечи моста, уменьшается, а индуктивные сопротивления другой пары рабочих обмоток соответственно в других противоположных плечах моста увеличиваются. В результате баланс моста нарушается и через нагрузку ZH протекает ток. Направление тока нагрузки определяется полярностью тока управления, т. е. при изменении полярности сигнала фаза тока нагрузки меняется на 180°. Поэтому статическая характеристика мостовой схемы, так же как и дифференциальной, имеет вид, показанной на рис. 24.1.
Не требуется отдельного трансформатора и в так называемой трансформаторной схеме реверсивного магнитного усилителя. Эта схема работает аналогично дифференциальной, но отличается удвоенным количеством рабочих обмоток. Половина этих обмоток выполняет функции первичных обмоток трансформатора и включается на напряжение питания U-. Другая половина этих обмоток выполняет функции вторичных обмоток трансформатора и питает нагрузку. Таким образом, сердечники магнитного усилителя одновременно являются и сердечниками трансформатора.
Сопоставление дифференциальной, мостовой и трансформаторной схем показывает, что с точки зрения коэффициента усиления и отдаваемой мощности они примерно одинаковы. Но наиболее простой является мостовая схема, которая и находит наибольшее применение. Однако применять ее можно лишь тогда, когда напряжение питания на 20—30 % превышает требуемое максимальное напряжение на нагрузке. В других случаях применяют трансформаторную или дифференциальную схему реверсивного магнитного усилителя.