

§ 22.5. Теория идеального магнитного усилителя
Теоретически магнитный усилитель можно рассматривать как переменную индуктивность, величина которой зависит от тока управления. В связи с нелинейностью кривой намагничивания переменный ток, протекающий по рабочей обмотке, содержит высшие гармоники. Расчеты для цепей с такими токами весьма сложны. Поэтому для математического анализа работы магнитного усилителя делают различные упрощения (допущения), не вносящие существенных погрешностей, но позволяющие получить сравнительно простые методы расчета.
Наибольшее распространение получила теория идеального магнитного усилителя. Эта теория основана на предположении, что сердечник имеет идеальную кривую намагничивания (рис. 22.16). По сравнению с реальной эта кривая имеет следующие особенности:
1) на участке от В - 0 до В= Bs магнитная проницаемость равна бесконечности;
2) в области насыщения магнитная проницаемость равна нулю;
3) площадь петли гистерезиса равна нулю.
На основании теории идеального магнитного усилителя можно получить представление о форме кривых индукции, ЭДС, напряжения и тока. А главное — эта теория дает простые формулы для основных параметров усилителя.
Рассмотрим работу идеального магнитного усилителя при последовательном соединении рабочей обмотки с нагрузкой и выходным постоянным током (см. рис. 22.13, а). Будем по-
лагать, что и рабочая обмотка, и обмотка управления состоят из двух секций, расположенных соответственно на двух сердечниках. Секции обмотки управления включены встречно. Число витков рабочей обмотки — шр, секций обмотки управления — ш .
Пусть приложенное к рабочей обмотке напряжение изменяется по синусоидальному закону и = £/м sin ю?. В секциях обмотки управления наводятся ЭДС, сумма которых должна быть равна нулю. Если пренебречь сопротивлением цепи управления, то уравнение ЭДС имеет вид
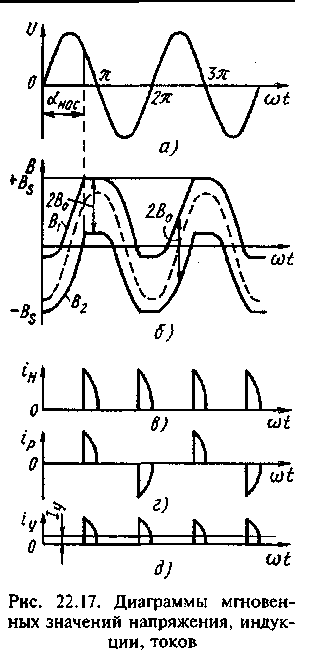


Теперь рассмотрим режим работы при наличии подмагничивания, т. е. когда по обмотке управления проходит ток. Этот постоянный ток создает постоянное магнитное поле, индукция которого равна В0. В одном сердечнике магнитные потоки, обусловленные постоянным и переменным токами, будут складываться, а в другом — вычитаться, вследствие чего значения индукции в сердечниках будут отличаться на величину 2Вй. В результате кривая индукции в одном сердечнике пойдет выше, а в другом — ниже (соответственно В\ и В2 на рис. 22.17, б).
Пусть в начальный момент подачи тока управления (t = 0) индукция В2 = -Bs. В этом случае индукция В1 имеет некоторое начальное значение 2Вй - Bs. По мере возрастания напряжения питания индукция 5, увеличивается и при <а/= анас достигает значения насыщения. За это же время с такой же скоростью согласно уравнению (22.12) уменьшается по абсолютной величине индукции В2 от своего начального значения -В5.
Индукция #,, достигнув величины насыщения, в дальнейшем некоторое время остается постоянной. Из уравнения (22.12) можно заключить, что если в одном сердечнике индукция постоянна, то в другом сердечнике в тот же промежуток времени индукция также будет постоянной. Это условие выполняется даже в том случае, если этот другой сердечник ненасыщен. Поэтому если с момента oat = анас индукции в сердечниках не меняются, то ЭДС самоиндукции в секциях рабочей обмотки равны нулю и все напряжение питания оказывается приложенным к нагрузке.
Ток в нагрузке скачком достигает наибольшего значения / = u/R, где R — активное сопротивление рабочей цепи. Таким образом, от со/=0 до момента насыщения первого сердечника при шГ = анас все напряжение сети приложено к рабочей обмотке, а остальную часть полупериода от <хнас до со? = и — к нагрузке (рис. 22.17,о). В следующий полупериод этот процесс повторяется с тем отличием, что сердечники меняются ролями. Таким образом, в интервале управления (от 0 до анас) оба сердечника ненасыщены, а в интервале насыщения (от ана(. до я) один из них насыщен, что приводит к постоянству потока и в другом сердечнике.
На рис. 22.17, г показана кривая тока в рабочей обмотке, а на рис. 22.17, в — в нагрузке. Как видно из совместного рассмотрения графиков на рис. 22.17, б, в, г, напряжение на нагрузке при угле насыщения анас скачком достигает наибольшего значения и затем изменяется по синусоидальному закону. Угол анас определяется постоянной индукцией Вй, т. е. управляющим сигналом Uy. Если сигнал цу = 0, то В0 = 0, а угол анас = и, следовательно, ток в нагрузке равен нулю. С ростом сигнала £/у увеличивается bq, а угол анас уменьшается и ток в нагрузке растет.



Определим уравнение статической характеристики вход-выход для идеального магнитного усилителя.
Из идеальной кривой намагничивания (см. рис. 22.16) видно, что для ненасыщенного сердечника Я= 0. Выше было установлено, что сердечники усилителя насыщаются поочередно, причем в каждый полупериод один из сердечников ненасыщен. В первом полупериоде (рис. 22.17) ненасыщен второй сердечник и для него справедливо равенство
![]()
Во втором полупериоде ненасыщенным оказывается первый сердечник и для него справедливо это же равенство. Поэтому мгновенные значения токов в рабочей и управляющей обмотках в любой момент времени связаны соотношением
![]()
Изменение тока управления iy происходит с частотой, которая вдвое больше частоты питания (рис. 22.17, д). Этот ток содержит кроме переменной и постоянную составляющую. Переменная составляющая является следствием трансформации тока из цепи нагрузки в соответствии с соотношением (22.16); она имеет основную частоту 2/=шД. Постоянная составляющая /у (среднее значение тока) не может появляться вследствие трансформации, она обусловлена управляющим сигналом и численно равна току сигнала /у (рис. 22.17, д). Так как формула (22.16) справедлива для мгновенных значений тока в течение всего полупериода, то аналогичное равенство будет справедливо и для средних значений токов нагрузки и управления:
го усилителя и по нему строится статическая характеристика /н=/(/у), показанная на рис. 22.18 (кривая Г). Максимально возможное значение тока имеет место при анас = 0, когда постоянно насыщены оба сердечника сразу. В этом случае равенство (22.17) теряет свою силу. Максимальная величина постоянной составляющей тока нагрузки в этом случае
![]()
где С/сртах — максимальная величина постоянной составляющей выпрямленного напряжения; R = Лн + Rp — активное сопротивление рабочей цепи, состоящее из сопротивления нагрузки R^ и сопротивления рабочей обмотки /?р.
При рассмотрении работы идеального магнитного усилителя не учитывалось сопротивление выпрямителя RB, которое несколько уменьшает значение тока нагрузки.
Из формулы (22.17) можно определить значения коэффициентов усиления магнитного усилителя: по току
Из последней формулы следует, что чем больше число витков обмотки управления при заданном сопротивлении Ry этой обмотки, тем больше коэффициент усиления по мощности.
Если усилитель выполнен без выпрямителя на выходе, т. е. по нагрузке проходит переменный ток, то в этом случае за выходной сигнал принимают действующее значение тока нагрузки

Если в нагрузке переменного тока имеется индуктивность, то она сглаживает кривую тока и вызывает отставание тока от напряжения.
Полученное выше основное уравнение (22.17) идеального магнитного усилителя с последовательным соединением секций рабочей обмотки справедливо и для параллельного соединения. В этом случае также происходит поочередное насыщение сердечников. Однако четные гармоники в цепи управления отсутствуют, зато они протекают в контуре рабочей обмотки. Так как через секцию рабочей обмотки каждого сердечника проходит половина тока нагрузки, то уравнение статической характеристики имеет вид
![]()
Соответственно изменяется выражение для коэффициентов усиления.