

Косвенные оценки качества
П ри
гармонических воздействиях качество
системы оценивают по АФХ, АЧХ, ФЧХ и
ЛАЧХ. Для оценки качества переходного
процесса используются:
ри
гармонических воздействиях качество
системы оценивают по АФХ, АЧХ, ФЧХ и
ЛАЧХ. Для оценки качества переходного
процесса используются:
Показатель колебательности М – это отношение максимального значения АЧХ замкнутой системы к ее значению при w=0. М=Amax(w)/A(0), при А(0)=1 показатель колебательности М= Amax(w).
Резонансная частота wp, при которой АЧХ замкнутой САУ имеет максимум. При ней колебания проходят через систему с наибольшим усилением.
Полоса пропускания системы – интервал частот от w=0 до w0, при котором выполняется условие A(w0)<=0.707A(0).
Частота среза wср, при которой АЧХ принимает значение, равное 1.
-
Критерий устойчивости Михайлова, кривая Михайлова.
Данный метод используется для исследования устойчивости замкнутой системы.
Является геометрической интерпретацией принципа аргумента.
Пусть дано характеристическое уравнение системы
![]()
Необходимо привести характеристический полином к комплексной форме D(jw)=X(w)+jY(w)=D(w)ej(w). Функции D(w) и (w) представляют собой модуль и фазу (аргумент) вектора D(jw). При изменении частоты w он будет описывать некоторую кривую, называемую кривой (годографом) Михайлова.
Д ля
того, чтобы система была устойчивой
необходимо, чтобы все корни
характеристического уравнения
принадлежали левой полуплоскости, тогда
ArgD(jw)=n/2
при 0<w<
ля
того, чтобы система была устойчивой
необходимо, чтобы все корни
характеристического уравнения
принадлежали левой полуплоскости, тогда
ArgD(jw)=n/2
при 0<w<![]()
Для
того чтобы САУ была устойчива, необходимо
и достаточно, чтобы кривая (годограф)
Михайлова при изменении частоты w
от 0 до
![]() ,
начинаясь при w=0
на вещественной положительной полуоси,
обходила против часовой стрелки
последовательно n
квадрантов координатной плоскости, где
n
– порядок характеристического уравнения.
,
начинаясь при w=0
на вещественной положительной полуоси,
обходила против часовой стрелки
последовательно n
квадрантов координатной плоскости, где
n
– порядок характеристического уравнения.
Эта кривая для устойчивых систем имеет спиралевидную форму, причем конец ее уходит в бесконечность в том квадранте координатной плоскости, номер которого равен степени характеристического уравнения.
-
Типовые нелинейные звенья систем управления, их графические характеристики.
Нелинейные звенья САУ описываются нелинейными уравнениями. Нелинейные звенья и системы классифицируются по физическим принципам действий, по способам аппроксимации, по статическим и динамическим характеристикам. Чаще всего используют нелинейные звенья:
-
С гладкой нелинейной характеристикой.
-
С кусочно-линейной характеристикой.
-
Характеристики, описываемые уравнениями, которые содержат произведения переменных или их производные.
-
Логические нелинейные звенья.




Различают статические и динамические нелинейные системы. Статические представляют в виде нелинейных статических характеристик. Они могут быть однозначными, неоднозначными релейными, неоднозначными и неоднозначными в виде поля.

Динамические нелинейности представляются в виде нелинейных диф.уравнений с переменными коэффициентами при производных. Все нелинейные звенья делят на аналитические и неаналитические. Все нелинейности делятся на сопутствующие и преднамеренные. В зависимости от этого все нелинейные САУ делятся на группы:
-
С сопутствующими нелинейностями, то есть нелинейности, спроектированные как линеаризованные, но из-за насыщения люфта, мертвого хода, сухого трения являющиеся практически нелинейными.
-
С преднамеренными нелинейностями – системы, проектированные как нелинейные.
-
Фазовый портрет нелинейной системы управления. Анализ поведения системы по фазовому портрету.
Н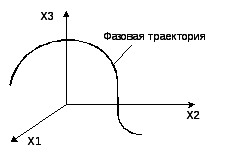
 елинейные
системы описываются нелинейными
дифференциальными уравнениями, общих
методов решения которых нет. В случае
отсутствия решения анализ систем
выполняется методом фазового пространства.
Фаза или состояние системы характеризуется
рядом параметров: X
– вход, U
– выход,
елинейные
системы описываются нелинейными
дифференциальными уравнениями, общих
методов решения которых нет. В случае
отсутствия решения анализ систем
выполняется методом фазового пространства.
Фаза или состояние системы характеризуется
рядом параметров: X
– вход, U
– выход,
![]() - скорость изменения входного сигнала,
- точность управления. Чем выше порядок
системы, тем больше параметров, описывающих
состояние системы. Для системы n-го
порядка параметров будет n.
В этом случае система описывается
n-мерным
пространством с одноименным названием
координат. Такое пространство называется
фазовым. Траектория получается при
перемещении точки, характеризующей
состояние системы. Наибольшей
информативностью обладает фазовая
траектория в пространстве отклонений.
Для каждой координаты Х переходит к ее
приращениям относительно установившегося
значения.
- скорость изменения входного сигнала,
- точность управления. Чем выше порядок
системы, тем больше параметров, описывающих
состояние системы. Для системы n-го
порядка параметров будет n.
В этом случае система описывается
n-мерным
пространством с одноименным названием
координат. Такое пространство называется
фазовым. Траектория получается при
перемещении точки, характеризующей
состояние системы. Наибольшей
информативностью обладает фазовая
траектория в пространстве отклонений.
Для каждой координаты Х переходит к ее
приращениям относительно установившегося
значения.
![]() .
В качестве другой координаты обычно
используется скорость изменения
приращения. Фазовая траектория построения
на осях X
и
.
В качестве другой координаты обычно
используется скорость изменения
приращения. Фазовая траектория построения
на осях X
и
![]() есть фазовый портрет. Пусть некоторая
система выведена из состояния устойчивости.
В точке М0.
Состояние системы изменится в соответствии
с линией 1. Эта линия в процессе работы
системы приближается к началу координат,
что соответствует устойчивой системе.
Если систему вывести в точку М1,
то состояние системы описывается фазовой
траекторией 2, которая удаляется от
начала координат, что соответствует
неустойчивой системе. Фазовый портрет
строится следующими способами: метод
изоклин, метод припасовывания.
есть фазовый портрет. Пусть некоторая
система выведена из состояния устойчивости.
В точке М0.
Состояние системы изменится в соответствии
с линией 1. Эта линия в процессе работы
системы приближается к началу координат,
что соответствует устойчивой системе.
Если систему вывести в точку М1,
то состояние системы описывается фазовой
траекторией 2, которая удаляется от
начала координат, что соответствует
неустойчивой системе. Фазовый портрет
строится следующими способами: метод
изоклин, метод припасовывания.
По данным фазового портрета можно косвенным образом оценить качество переходного процесса.