5. Построение логарифмической характеристики корректирующего устройства по лачх исходной системы и желаемой лачх
Если в САР имеется последовательное корректирующее устройство, то ее желаемую передаточную функцию можно представить в следующем виде:
Wж(s)=Wк(s)Wн(s), откуда при s = jω имеем логарифмические амплитудную Hк(ω)= Hж(ω)-Hн(ω) и фазовую θк(ω)= θж(ω)-θн(ω) частотные характеристики. Подняв неизменяемую логарифмическую амплитудную характеристику до уровня желаемой и построив фазовую частотную характеристику θж(ω), определим запасы устойчивости системы по фазе и модулю. Если они соответствуют требованиям технических условий, то, получим логарифмическую амплитудную характеристику последовательного корректирующего устройства.
Рассмотрим синтез САР с параллельным корректирующим устройством. Запишем передаточную функцию системы в виде
![]()
При условии, что |Wн(jω)Wк(jω)| » 1 имеем | Wк |=1/| Wж |, или Нк(ω)= -Нж(ω), где Нж(ω) —желаемая логарифмическая амплитудная характеристика синтезируемой системы.
Для обеспечения требуемого порядка астатизма проектируемой системы необходимо, чтобы порядок нуля передаточной функции Wк(s) был не ниже порядка полюса Wн(s) при S = 0.
6. Показатели качества управления, их определение по переходным и ач характеристикам системы.
Прямые показатели:
Время переходного процесса
![]() - время регулирования системы; определяется
как интервал времени от момента приложения
какого-либо воздействия до времени
вхождения в пятипроцентную трубку (
- время регулирования системы; определяется
как интервал времени от момента приложения
какого-либо воздействия до времени
вхождения в пятипроцентную трубку (![]() ).
).
Перерегулирование
или (максимальная динамическая ошибка)
– определяется выражением
![]() .
.
Колебательность n – число колебаний системы от момента воздействия на нее до перехода в установившееся состояние.
Время нарастания регулируемой
величины
![]() –
время, при котором выходная величина
достигает своего максимального значения.
–
время, при котором выходная величина
достигает своего максимального значения.
Время первого согласования
![]() -
время, за которое регулируемая величина
первый раз достигает своего установившегося
значения.
-
время, за которое регулируемая величина
первый раз достигает своего установившегося
значения.
Качество переходных процессов численно характеризуется следующими показателями качества.
Косвенные показатели
Показатель колебательности определяется
выражением
![]() .
.
Резонансная частота
![]() -
частота, при которой АЧХ достигает
максимального значения
-
частота, при которой АЧХ достигает
максимального значения
![]() .
.
Частота среза
![]() - частота, при которой значение АЧХ
равно единице. Характеризует длительность
переходного процесса (чем меньше
- частота, при которой значение АЧХ
равно единице. Характеризует длительность
переходного процесса (чем меньше
![]() ,
тем хуже быстродействие системы, то
есть больше время регулирования системы).
,
тем хуже быстродействие системы, то
есть больше время регулирования системы).
Полоса пропускания
![]() –
время наилучшего прохождения сигнала
по системе. Для ее определения вычисляется
величина
–
время наилучшего прохождения сигнала
по системе. Для ее определения вычисляется
величина
![]() ,
,
В первом приближении длительность переходной характеристики может быть оценена по величине резонансной частоты p .Так как частота колебаний переходной характеристики примерно равна p, время tmax1 достижения первого максимума переходной характеристикой близко
половине периода колебании этой частоты tmax1=/p.
7. Типовые нелинейные звенья систем управления, их графические характеристики.
Нелинейные системы по способу аппроксимации
- с гладкой нелинейной характеристикой
- с кусочно-линейной характеристикой
- логические нелинейные элементы
Нелинейные статические характеристики
-
однозначная нелинейная характеристика
-
неоднородная гистерезисного типа
-
релейная гистерезисного типа
-
неоднородная в виде поля (свет-фотодиоды)
Зоны нечувствительности характеристик различных элементов систем регулирования можно объяснить различными причинами, зависящими от конструктивного выполнения данного устройства, типа его и т. д. Схема управления электродвигателем при помощи реле. Нелинейная характеристика с зоной нечувствительности. При отклонении контакта больше чем на а (т.е., если |x| >а) на зажимы двигателя подается постоянное напряжение х2=u. Характеристика схемы которая может быть записана



Нелинейная характеристика элемента ограниченной мощности при наличии зоны нечувствительности. Уравнение этой характеристики может быть записано в виде:
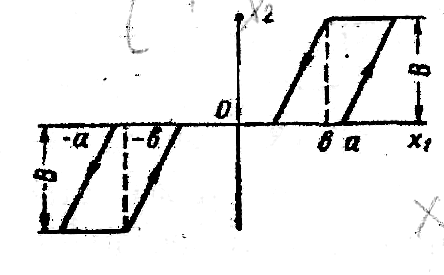
Нелинейная характеристика гистерёзисного типа. Эта характеристика отличается от предыдущей наличием гистерезисной петли. При изменении x1 от нуля до а выходная величина остается равной нулю. При х1 > а х2= к(х1 — а). При уменьшении x1 до значения b х2 остается постоянным и равным b. При х1<а — bх2= к(х1 — b)