

Даты:
1990 Мониторы стандарта SVGA
1991 - Процессор 80486DX
1992 – ТВ тюнер 1996 - Проц EDO DRAM 1998 – память DDR SDRAM
Поколение ВС:
Ручной – с 50-го тысячелетия до н.э. (пальцевый счет, 10-я 12-я система, счет групп предметов, перекладываний предметов и т.д.)
Плальцевый счет, Узелковый счет, Группировка, Абак, Счеты (16,17в), Дж. Непер открыл логарифмический способ
Механический – с середины 17в (выч устройства и приборы + исполнение мех. Принципов)
Шиккард – 6-ти разрядные числа (суммирующие часф. В 1960-реализованны)
1642. блез паскаль – машинное выполнение арифметических операций над 10-ми числами (паскалин)
1673 – арифмометр Лейбница
1820 – чарльз калмар
1833 – чарльз беббидж аналитическая машина
Электромеханический принцип (с 90-ых годов 19в)
1888 – герман холлерит – табулятор
1941 – цузе = программно управляемая машина + память
1944 – Эйкен – марк1 (на эл.-мех. Релле)
1957 – ссср = релейная вс (РВМ-1)
Электронный период (с 40-ых 20-го века)
1945 – фон нейман
1951 – лебедев = МЭСМ (54=БЭСМ)
1971 – первый М
1964 – Энгельбарт
1976 – Аппле пк
1985 – ссср пк
Общие сведения о тех. Обслуживании ЭВС
Эксплуатация эвс – заключается в использовании устройства для выполнения всего комплекта возложенных задач, для эффективного использования и поддержания ЭВС в работоспособном состоянии в процессе эксплуатации проводится ТО ТО – комплекс организационных мероприятий в том числе обеспечение эвс необходимой аппаратурой + оборудованием предназначенной для эффективной эксплуатации и ремонта ЭВС 3 вида ТО (сервис) 1) Индивидуальное обслуживание – обслуживание одного устройства средствами обслуживающего персонала
2) Групповое обслуживание – обслуживание нескольких устройств сосредоточенных в одном месте силами и средствами обслуживающего персонала.
3) Централизованное ТО – сеть региональных центров обслуживания и их филлиалов, которые в централизованном порядке производят: 1) Монтажно – наладочные работы и ввод в эксплуатацию. Оборудования
2) Устранение сложных отказов 3) Оказание помощи обслуживающего персонала предприятия и повышение их квалификации.
Все мероприятия входящие в ТО делятся на 3 группы 1) контроль тех. Состояния – служит для контроля работы устройства. Исключается влияние случайных сбоев.
2)Профилактическое обслуживание – ряд мероприятий направленных на поддержание заданного тех. Состояния в течение опр. Промежутка времени и продление тех. Ресурса. С точки зрения организационного распространения получила планово – предупрежден. обслуживания, основанное на календарном принципе, при этом составляется график проведения профилактических работ, в котором указан объем и сроки проведения мероприятия:
Виды профилактического обслуживания: 1) ежедневня (то-1) 2) еженедельная (то-2)
3) ежемесячная (то-3)
4)полугодовая (то-4)
5) годовая (то-5)
3) Текущее тех. Обслуживание – комплекс ремонтных работ направленных на восстановление утраченных средств или работоспособности ЭВС, путем замены или ремонта узлов или блоков ЭВС.
ТО средств вычислительной техники (СВТ) включает в себя следующие этапы:
-
Аппапатное обеспечение СВТ и сетей (обслуж):
Профилактика
Диагностика
Ремонт
-
Обслуживание программного обеспечения СВТ и сетей
Установление ПО
Сопровождение ПО
Антивирус
Система контроля – совокупность апп. И программных средств, предназначен для определения тех. Состояния поддержания необходимого уровня эффективной работы ЭВС Виды системного контроля:
-
Программный контроль – основан на использовании программно - конструкторскую работу устройства
-
Апп. Контроль – основан на внедрении в состоянии устройства спец. Оборудования раб. Независимо от основного
-
Комбинированный
Простейшие контрольно измерительные приборы
Причины выхода из строя электрических компонентов:
-
VD VT (пробой п/п, обрыв, кз)
-
Конденсаторы (обрыв, кз, утрата изолирующих свойств диэл, пробой)
-
Резистор (обрыв, кз, разрыв резистивного слоя, пробой)
-
Трансформатор (обрыв обмоток трансформатора, нарушение изоляции)
-
ПП (разрыв дорожек, кз)
Эффективность поиска неисправностей и ремонта ЭВС значительно повышается при наличии удобных и простых в эксплуатации контрольно-измерительных приборов:
-
Мультиметр (U,I,R): При проверке цифр микросхемы тест-точками служат контакты микросхемы, предполагается что при нормальной работе на каждом контакте действует конкретный логический сигнал; отсутствие сигнала или неверный сигнал показывают возможный источник неисправности.
ТТЛ (Uпит = +5В)
-
Лог 1 или H уров – от 2.5 до 5 В
-
Лог 0 или L уров – от 0 до +0.8 В
-
Высокоипмпедансное состояние (высокоомное, 3-е состояние) от +0.8 до +2.5В
Тест-точка в высокоомном состоянии означает что при применительно к прохождению сигналов она отключена но остается в соединении со схемой.
Высокоомное состояние затрудняет поиск неисправностей; микросхема переходит в такое состояние в соответствии с логикой работы или из-за выхода из строя.
-
Логический пробник – предназначен специально для тестирования логических состояний и импульсов в цифровых схемах, он не требует никакой интерпретации напряжений. При правильном подключении к схеме, светодиоды логического пробника покажут наличие H и L уровней или импульсов. Имеется переключатель для работы с ТТЛ и К-МОП микросхемами; переключатель для обнаружения различных типов импульсов:
Pulse –показывает наличие потоков импульсов
Mem – определяет одиночный импульс и сохраняет его
Простейшие логические электрические приборы
|
High |
low |
pulse |
Пояснение |
|
- |
- |
- |
1.Пробник не подключен 2.Тест-точка оторвана 3.Высокоимпедансное состояние |
|
+ |
- |
- |
1. Логическая единица или Hi уровень |
|
- |
+ |
- |
1. Логический ноль или L уровень |
|
+ |
- |
+ |
1.H уровень с импульсами (поток отрицательных импульсов) |
|
- |
+ |
+ |
1. L уровень с импульсами (поток положительных импульсов) |
|
- |
- |
+ |
1.Поток импульсов с частотой более 100 kHz |
|
+ |
+ |
+ |
1.Поток импульсов менее 100 kHz |
3.Осциллограф – осциллограмма формируется в координатах X – частота/время Y – U
Обычный осциллограф работает с частотой до 100 kHz Поэтому в цифровых схемах его можно использовать для проверки низкочастотных компонентов (звуковые схемы и другие низкочастотные компоненты
-
Тестер целостности – не сообщают о величине сопротивления, а показывает наличие КЗ, или разрыва. Кроме проводника, тестером можно проверить целостность печатных проводников, разъемов
-
Логический пульсатор – предназначен для генерации прямоугольного сигнала. Конструктивно оформлен как пробник, так же соединяется со схемой
При включенном устройстве зондором пульсатора касается тест – точки. В нужный момент времени на корпусе пульсатора нажимается кнопка и в тест точку подается один цикл прямоугольного сигнала (HLH). Такие тесты проводятся на предприятии и применяются при проектировании устройства для контроля качества и на сборочной линии.
-
Индикатор тока. С его помощью на печатной плате можно обнаружить места, в которых из за кз протекает переменный ток. Касаясь зондом индикатора тока, при обнаружении переменного тока на корпусе загорается сигнальная лампа. Индикатор тока может иметь регулировку чувствительности от 1 до 8 (положение 1 – наиболее чувствительное) Индикатор тока целесообразно применять для нахождения КЗ в схеме со множеством параллельных цепей.
-
Частотомер – измеряет точную частоту кварце-генератора синхронизации.
Влияние внешних факторов на работоспособность ЭВС
Классификация внешних факторов
Климатическая
-
Изменение температуры и влажности внешней среды – при разработке эвм – учитывается температуры ЭВМ и температура окружающей среды
-
Влажность
-
Тепловой удар
-
Увеличение атмосферного давления
-
Наличие ветра и движущихся потоков песка/пыли – вибрация, нарушающая работы эвм. Песок, пыль – увеличение температуры внутри ЭВМ
-
Присутствие активных веществ в окружающей среды
-
Наличие грибковых образований, плесени, микроорганизмов
-
Наличие насекомых и грызунов
-
Наличие взрывоопасной и воспламеняющейся атмосферы
Механические факторы
-
Вибрация –
-
Механический удар
-
Линейное ускорение
-
Акустический удар
-
Невесомость
Радиационные факторы
1.Естественная радиация
Солнечная, космическая радиация
2.Искусственная радиация
По совокупности значений климатических, механических, радиационных факторов ЭВМ делятся на 7 групп:
Группа 1 – стационарные эвм, работающие в отапливаемых наземных и подземных сооружениях.
Группа 2 – стационарные эвм, работающие на открытом воздухе, или в неотпаливаемых помещениях
Группа 3 – транспортируемые (возимые) – установленные в автомобилях, мотоциклах, с/х, дорожной строительной и другой технике, и работающие на ходу
Группа 4 – возимые установленные во внутренних помещениях судов, работающие на ходу.
Группа 5 – возимые – установленные на Ж/Д объектах, работающие на ходу.
Группа 6 – возимые и портативные, предназначенные для длительной переноски на открытом воздухе, или неотапливаемых помещениях, не работающие на ходу.
Группа 7 – портативные , предназначенные для длительной переноски на открытом воздухе, или в неотапливаемых помещениях работающих на ходу.
Общие сведения о контроле микропроцессорных систем
1 Особенности контроля МПС
2 Существующие подходы к поиску неисправностей
3 Самоконтроль в аппаратуре МПС
Поиск неисправностей в аппаратуре МПС осложнен рядом причин:
1 Высокая сложность бис,сбис (имеют большое число внутренних состояний для полного контроля МП) требуется много времени, поэтому полный контроль МП невозможен
2 малое число контрольных точек
3 В цифровых устройствах число точек для непосредственного контроля очень мало. Доступ к внутренним элементам микросхем возможен под действием программного управления. Это требует подачи тестовых воздействий на доступные для контроля точки схемы и синхронного анализа ответных реакций
4 Нераздельность аппаратуры и ПО. Часто между ними нельзя провести чёткую границу, что объясняется конструктивными и схемотехническими особенностями МПС. Часто МПС исполняется в виде одной ПП, и в микросхеме могут быть размещены различные функции
5 Шинная организация МПС
6 необходимость одновременного контроля состояния шин
7 высокое быстродействие МПС
Особенности МПС, помогающие решать задачи отладки:
1 Способность к самоконтролю – как только отлажена синхронизация МПС и начал работать контур программного управления => появляется возможность использовать МП для сбора и обработки информации о состоянии элементов
2 Стандартная форма эл. сигналов, что позволяет упростить контроль состояния точек схемы (принадлежность к лог. 1 или к к лог. 0)
Подходы к поиску неисправностей
1 Традиционный подход – при данном подходе используются простейшие контрольно измерительные приборы:
Мультиметр Логический пробник
Тестер целостности соединений
Логический пульсатор
Индикатор тока
Частотомер
Логическая клипса ( А)представлена в виде контактного зажима, закрепляемого на корпусе микросхемы, двухрядовыми штыревыми выводами, которые удлиняют контакты микросхемы в удобную для измерений позицию. Б) Представлена в виде контактного зажима, на верхней панели которого расположены светодиодные индикаторы, выражающие логическое состояние выводов микросхемы).
2 Пошаговый метод поиска неисправности – при этом методе выполняемый машинный цикл пошагово сравнивают с образцовым. Для этого необходимо к информационным и адресным шинам подсоединить схему защелку данных или логический анализатор . Схема-защёлка данных выполняется в виде последовательности D триггеров, можно вставлять в гнездо расширения платы. Подключенный прибор служит для отслеживания выполнения программы системы. Логический анализатор так же используется для сбора данных, позволяет собирать информацию за несколько машинных циклов и отображать в форме, удобной для пользователя. Недостатки методов - диагностика требует много времени, наладчик должен знать аппаратные средства МПС, все контакты микропроцессора и выполнение машинных циклов в ответ на каждую команду.
3.Диагностический самоконтроль - при данном методе выполняется программа, проверяющая аппаратное обеспечение и определяющая неисправности. Достоинство – быстрота локализации неисправности. Недостатки – невозможно использовать при полностью неработоспособной системе. Сложность разработки полностью совершенной программы, учитывающие все неисправности системы.
4. Сигнатурный анализ.
Самоконтроль и диагностика МПС – использованию самоконтроля способствуют следующие обстоятельства:
1 способность МП под действием программ создавать большие тестовые последовательности
2 способность МП к логической обработке информации. Это позволяет сравнивать отклики проверяемых узлов с эталонными без применения дополнительной аппаратуры.
3 совмещение функций управления и обработки информации в одной микросхеме. Это позволяет при построении тестовых программ систему разделять на две части, проверяющую и проверяемую
4 программная доступность всех узлов МПС (МП может подавать тестовые воздействия и анализировать ответные реакции
5 написание программ самодиагностики на стандартных языках программирования. Программа самодиагностики строится по принципу проверки всех узлов МПС. В первую очередь проверяются ресурсы микропроцессора (внутренние регистры, внутренние магистрали, правильность выполнения команд).
Обслуживание цифровых схем
Уровни поиска неисправностей:
На уровне плат (замена подозрительной ПП)
На уровне микросхем (замена дефекта)
На уровне схемы (точная причина неисправности) – необходима схема и контрольно измерительные приборы
Для обслуживания цифровых схем необходима следующая документация (сборочный чертеж + спецификация, перечень элементов, технические руководства производителей, и другая необходимая документация)
Схема размещения микросхем показывает физическое расположение микросхемы. Схема может быть оформлена как рисунок, фотография, сборочный чертеж или сама плата).
Схема размещения микросхем предоставляет информацию:
Местонахождение каждой микросхемы
Приблизительный размер микросхемы относительно размеров других микросхем
Номер каждой микросхемы
Расположение числа каждой микросхемы
Некоторые микросхемы вставлены в гнезда в другие впаянные в плату. Должны быть указаны микросхемы в гнездах
Должны быть указаны и другие элементы
Необходимо указать расположение металлического экрана защиты
Должны быть указаны отличительные знаки (отверстия для винтов, разъемы)
Классификация неисправностей:
По влиянию на работоспособность
Существенные (приводят к отказу системы)
Несущественные (не влияют на работоспособность системы)
По проявлению во времени
Устойчивые (постоянно присутствуют в схеме, отказ)
Неустойчивые (появляются и исчезают в произвольные моменты времени, сбой)
По количеству одновременно присутствующих неисправностей
Одиночные
Многократные
По типу неисправности
КЗ
Обрыв
Изменение логических функций элементов
Константная неисправность
Формирование тестовых векторов для комбинационных схем
Константная неисправность – неисправность, приводящая к установлению на линии постоянного сигнала = относится к классу внутренних неисправностей элементов.
1.залипание в единицу
2.залипание в лог ноль
Показания функции при наличии константных неисправностей
И
|
X1(0) |
X1(1) |
X2(0) |
X2(1) |
F0 |
F1 |
|
0 |
0 |
0 |
0 |
0 |
1 |
|
0 |
1 |
0 |
0 |
0 |
1 |
|
0 |
0 |
0 |
1 |
0 |
1 |
|
0 |
1 |
0 |
1 |
0 |
1 |
ИЛИ
|
X1(0) |
X1(1) |
X2(0) |
X2(1) |
F0 |
F1 |
|
0 |
1 |
0 |
1 |
0 |
1 |
|
1 |
1 |
0 |
1 |
0 |
1 |
|
0 |
1 |
1 |
1 |
0 |
1 |
|
1 |
1 |
1 |
1 |
0 |
1 |
Для K сигнальных линий существует 2*К потенциальных одиночных константных неисправностей.
Тестовый набор – это тестовые векторы, которые подаются на схему для проверки её работоспособности.
Метод активизации пути заключается в проверке неисправности в заданной точке путем подачи в неё значения сигнала, противоположенного тому, чем вызвана неисправность. Если тестируется неисправность залипания в единицу, то в точку неисправности необходимо подать логический ноль, если залипание в ноль, то единица.
Путем подачи на вход сигналов соответствующих уровней – активизируется путь передачи логического уровня сигнала, в точку неисправностей сквозь схему до выхода, где его можно наблюдать И-ИЛИ
|
X1 |
X2 |
X3 |
F |
|
1 |
1 |
0 |
1-ИСПРАВНА 0-НЕИСПРАВНА |
И-ИЛИ-НЕ
|
X1 |
X2 |
X3 |
F |
|
1 |
1 |
0 |
0 – ИСПРАВНА 1-НЕИСПРАВНА |
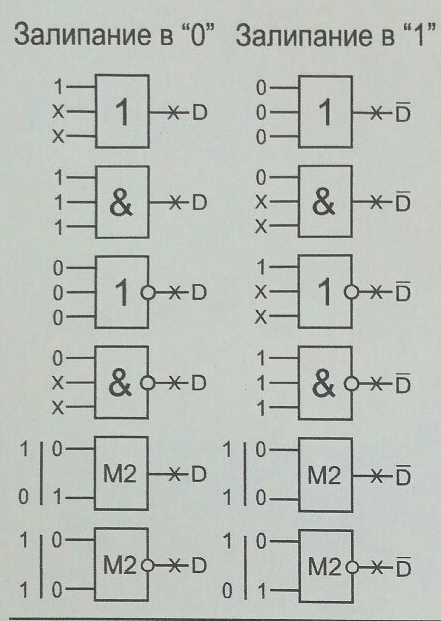
Константная неисправность на выходе логического элемента
|
Залипание в 0 |
Залипание в 1 |
|
Или + выход D Входы = 1 + 0 |
Или
+ выход
0 + 0 |
|
И + выход D Входы 1 + 1 |
И
+ выход
0 + Х |
|
Или не + выход D Входы 0 + 0 |
Или
не + выход
1+Х |
|
И – не + выход D Входы 0+0 |
И
не + выход
1+1 |
|
Исключающее или + выход D (1 когда разные) Входы 1+0 или 0+1 |
Исключающее
или + выход
Входы 0+0 ИЛИ 1+1 |
|
Исключающее или-не + ВЫХОД D(1 когда равны) Входы 0+0 или 1+1 |
Исключающее
или-не + выход
Входы 0+1 или 1+0 |




 (1 когда разные)
(1 когда разные) (1 когда равны)
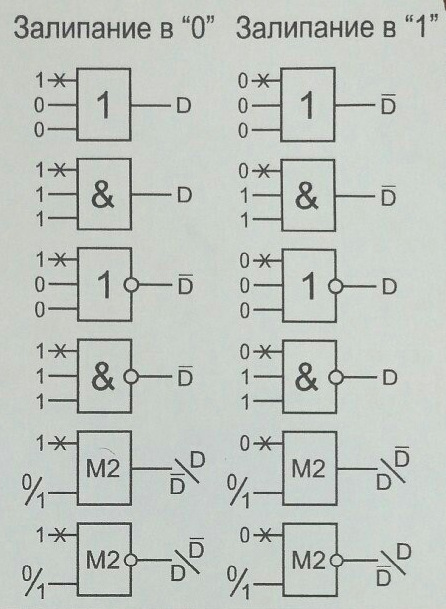
(1 когда равны)Константная неисправность на входе логического элемента:
|
Залипание в 0 |
Залипание в 1 |
|
Или + выход D Входы = 1 + 0 |
Или
+ выход
Входы 0 + 1 |
|
И + выход D Входы 1 + 1 |
И
+ выход
Входы 0 + 1 |
|
Или
не + выход
Входы 1 + 0 |
Или
не + выход Входы 0+0 |
|
И
– не + выход
Входы 1+1 |
И не + выход D Входы 0+1 |
|
Исключающее
или + выход D
(1 когда разные) D/ Входы 1+X |
Исключающее
или + выход
Входы 0+X |
|
Исключающее
или-не + выход D
(1 когда равны) D/ Входы 1+X |
Исключающее
или-не + выход
Входы 0+X |



 D
D

 /D(1
когда разные)
/D(1
когда разные)
 /D
(1 когда равны)
/D
(1 когда равны)Прохождение сигналов D/неD через логические элементы

|
Вход D |
Вход
|
|
Или + выход D Входы = D + 0 |
Или
+ выход
Входы
|
|
И + выход D Входы D + 1 |
И
+ выход
Входы
|
|
Или
не + выход
Входы D + 0 |
Или
не + выход Входы
|
|
И
– не + выход
Входы D+1 |
И не + выход D Входы
|
|
Исключающее
или + выход D
(1 когда разные) D/ Входы D+X |
Исключающее
или + выход
Входы
|
|
Исключающее
или-не + выход D
(1 когда равны) D/ Входы D+X |
Исключающее
или-не + выход
Входы
|


 + 0
+ 0
 + 1
+ 1
 D
D +0
+0
 +1
+1
 /D(1
когда разные)
/D(1
когда разные) +X
+X
 /D
(1 когда равны)
/D
(1 когда равны) +X
+X
Основы аппаратного контроля (АК)
АК используется для определения факта неверной работы отдельных устройств и узлов ЭВМ, ЭВС. Позволяет достаточно эффективно проверять правильность работы этих устройств и узлов, как при выполнении элементарных операций, так и при выполнении каких-либо преобразований.
Определение ошибок должно производиться непрерывно, и следовательно не снижать быстродействие, поэтому эти функции возлагаются на быстродействующие аппаратные средства контроля, которые позволяют совмещать во времени выполнение основных и контрольных операций.
При АК состав узла или устройства вводится избыточная контрольная аппаратура, которая функционирует одновременно с основной. Сигналы, возникающие при работе основной и контрольной аппаратуры сравниваются по определенным законам, и в результате вырабатывается информация, которая свидетельствует о правильности работы устройства или узла.
Модель функционального
узла с системой АК можно представить в
виде:
Х –вход, У – выход, А – основной узел, В – контролирующий узел, D – узел сопоставления.
Для сопоставления процессов функционирования узлов А и В могут использоваться следующие методы:
1.Сопоставление внутренних состояний А и В
2.Сопостовление выходных слоев А и В
3.Сопоставление перехода из одного состояния в другое
Самым простым для реализации этих методов является дублирование, при котором узел А идентичен узлу В, входы их объединены и оба работают от единой системы синхронизации.
Так же может использоваться контроль по модулю
 Узел
А выполняет арифметические операции,
узел F
служит для получения остатка от деления
входных слов на некоторый модуль, узел
В выполняет операции над контрольными
словами, узел D
сравнивает результаты этих операций
по модулю
Узел
А выполняет арифметические операции,
узел F
служит для получения остатка от деления
входных слов на некоторый модуль, узел
В выполняет операции над контрольными
словами, узел D
сравнивает результаты этих операций
по модулю
Отладка ПМС
1.Отладка отдельных устройств – МП, ОЗУ, ПЗУ, контроллеры, блок питания и т.д.
2.Взаимодействие отдельных устройств – взаимодействие МП с магистралями, проанализировав их сигналы, можно проконтролировать выполнение программы МП
3.Работа аппаратуры при различных режимах адресации МП – косвенная, прямая непосредственная
4.Проверка работоспособностти МПС в автономном режиме – если тестовая программа прошла успешно.
Для того, чтобы автономно отладить МПС используются следующие приборы: логический анализатор, генератор сигналов, комплекс диагностирования и т.д.
Логический анализатор (ЛА)
Структурная схема ЛА
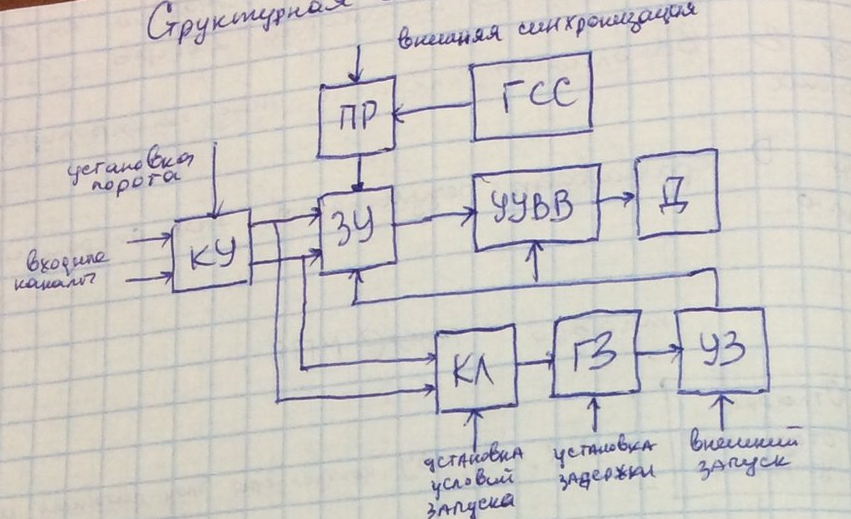
ГСС – генератор синхронизирующих сигналов
ПР – переключатель режимов
КУ – компараторы уровней
ЗУ – запоминающее устройство
УУВВ – устройство управления визуальным выводом
Д – дисплей
УЗ – устройство запуска
ГЗ – генератор задержки
ЛК – логический компаратор
На входные сигналы логического анализатора от диагностируемого устройства, которые распределяются компаратором уровней (КУ) на соответствующие логические уровни. Сформированный в КУ набор значений сигналов подается на входы ЗУ и ЛК.
Во время работы логический анализатор может находиться в одном из 3ех режимов:
1.Режим настройки
2.Режим регистрации
3.Режим индикации
В режиме настройки ЛК настраивается на обнаружение определенной последовательности наборов значений сигналов. После обнаружения этой последовательности КЛ выдает сигнал ГЗ, который через заданное время выдает сигнал на УЗ, которое инициализирует или прекращает запись набор значений входных сигналов в ЗУ.
Режим регистрации бывает 2ух видов:
1.Асинхронная регистрация (тактовые сигналы попадаются в ЗУ от диагностируемого устройства)
2.Синхронная регистрация (тактовые сигналы записи поступают от внутреннего ГСС)
Режим регистрации продолжается до появления сигнала, вызывающего режим индикации. Логический анализатор прекращает регистрацию данных, УУВВ информацию на экран дисплея в виде временных диаграмм, таблиц и т.д.
Логический анализатор отображает на экране дисплея нормируемые на уровне цифровые сигналы. При этом если значение выходных сигналов превышает порог срабатывания, то значение сигнала на входе ЗУ соответствует логич 1, если не превышает, то логич 0.
Основные логические характеристики логического анализатора
1.Число каналов 16, 32
2.Длина логических последовательностей на канал
3.Максимальная тактовая частота регистрации данных
Логические анализаторы:
Анализаторы логических временных диаграмм (в алвд используется синхронный режим записи, при котором источником синхросигналов является внутренний генератор анализатора). Эти анализаторы используются для регистрации переходных процессов, дают достаточно точную информацию о сигналах на входных шинах устройства. Позволяют обнаруживать кратковременные импульсные помехи, сбои в работе аппаратуры, вызванные ошибками синхронизации или сбоями элементов устройства.
2 Анализаторы логических состояний (алс). Имеют асинхронный режим записи, при котором воспринимаются только установившиеся значения логических сигналов в контрольных точках, не давая никакой информации о временных соотношениях между сигналами
Генератор сигналов (генератор цифровых последовательностей, генератор логических сигналов, генератор логических слов) – прибор, предназначен для формирования и подачи входных воздействий на диагностируемую систему. Совместно с логическим анализатором образуют подачу внешних сигналов и сбор ответных реакций диагностируемой цифровой системы. Генератор сигналов используют для тестирования дискретных систем или для эмуляции каких либо устройств МПС.
Обобщенная структурная схема генераторов сигналов
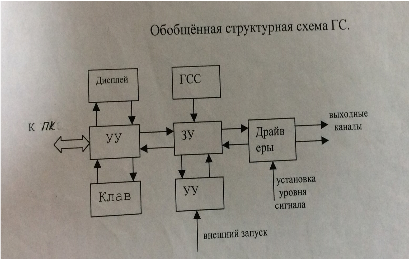
Последовательность входных сигналов, которую необходимо подать на диагностируемую МПС заносится в ЗУ. Информация в ЗУ заносится либо с клавиатуры (дисплей используется как средство отображения вводимой информации), либо через стандартные интерфейсы с памяти ПК. После этого устанавливается:
1.Частота тактирования, с которой входные данные будут подаваться на диагностируемую систему.
2.Уровни сигналов соответствующие лог 0 и лог 1 (эти уровни обеспечиваются драйверами, являющимися усилителями напряжения)
3.Режим цикличности подачи воздействия
Режим циклов подачи воздействия:
1.Один цикл 2.N цикл
3.Неприрывный
К выходным каналам подключается объект диагностирования. Сигнал пуск подается либо с клавиатуры, либо с пк.
Характеристики сигналов, подаваемых ГС
1.Тактовая частота (ряд неисправностей проявляется на высоких частотах, поэтому для обнаружения этих неисправностей диагностирование необходимо вести на максимально возможной частоте для конкретной проверяемой системы.
2.Число выходных каналов (2 8 16 32 64. Наиболее распространены 16 и 32 канальные ГС)
3.Ёмкость памяти на канал (16 до 2048 слов).
Классификация генераторов сигналов
1.По способу подачи воздействия
А)Генераторы сигналов последовательного кода
Б)Генераторы сигналов параллельного кода
2.По способу реализации устройства управления
А)С буферной памятью (данные из памяти считываются последовательно, начиная от конкретного начального адреса, заканчивая заданным конечным адресом ЗУ (эти генераторы наиболее простые
Б)С управляющей памятью (в которой память делится на 2 части (ЗУ данных, ЗУ команд, имеющих общие управления и общий регистр адреса. Данные и команды считываются одновременно. Команды поступают на дешифратор команд, определяющий что необходимо сделать со считанными данными (эти генераторы наиболее быстродейств)
В)С алгоритмическим генерированием последовательностей. Эти генераторы имеют микропрограммируемый процессор. Память данных и память микропрограмм работают автономно. Такие генераторы используют для контроля микросхем памяти
Внутрисхемные симуляторы. Включение ВСЭ (внутрисистемные эмуляторы)
Метод внутрисхемной эмуляции используется при проектировании МПС. Метод заключается в том, что процессор (или управляющий элемент системы) заменяется (эмулируется) устройством (ВСЭ), выполняющим точно такие же функции, что и замещающий элемент реальной системы. Эмулятор может выполнить эти функции в том случае, он находится под управлением другой, достаточно мощной системы (ПК)

Диагностический комплекс
Тестово-диагностический комплекс является автоматизированным рабочим местом инженера-электроника и представляет собой комплекс аппаратных и программных средств на базе персонального компьютера.
Обладая всеми свойствами сервисных приборов (надежность, малые габариты, простота обслуживания), комплекс, используя возможности современного компьютера, является гибким и универсальным, что позволяет автоматизировать ремонт и наладку различных типов промышленных устройств.
Расходы на приобретение комплекса быстро окупаются как при эксплуатации его в больших сервисных центрах, за счёт универсальности и производительности, так и на небольших предприятиях, где 1-2 электроника при использовании комплекса смогут выполнять ремонт всей номенклатуры электронных устройств.
Область применения:
1.Ремонт и наладка отечественных и импортных электронных устройств управления промышленным оборудованием, в том числе: систем ЧПУ, микро-эвм, контролеров, электроприводов, приборов.
2.Ремонт и наладка средств связи и электронных АТС.
3.На базе комплекса может быть изготовлено специальное диагностическое оборудование. В настоящее время поставляются специализированные комплексы для ремонта электронных плат сигналов с ЧПУ, для ремонта ТЕЗ, АТС “квант”
4.Комплекс может быть использован для обучения студентов и обслуживающего персонала на промышленных предприятиях.
Состав тестово-диагностического комплекса 1.Блок диагностики 2.Плата связи с ПЭВМ
3.Универсальные и специальные адаптеры 4.Аппаратно-программные комплексы для ремонта электронных плат
5.Программное обеспечение
6.Техническая документация
Дополнительное оборудование:
1.Эмулятор ПЗУ
2.Универсальный блок преобразователей сигналов (УВПС)
3.Программаторы EPROM и PROM
Блок диагностики
1.Программируемый контроллер
2.Число каналов ввода-вывода – 96, 144, 192, 256 и более. Уровни сигналов – ТТЛ, КМОП
3.Блок питания для диагностируемых устройств (+5в, -5в, +12в, -12В) 4.Зонд логический – одноканальный логический анализатор, генератор.
Плата связи с ПЭВМ
Плата работает по стандартному протоколу связи с внешними устройствами для шины ISA.
Плата преобразует сигналы шины ISA в сигналы внутренней шины блока диагностики. Они выведены на внешний разъем, к которому подключается кабель связи с блоком диагностики. На плате имеется дополнительный интерфейс для обмена с внешними устройствами 16-ти разрядными данными. К нему подключается, в частности, эмулятор ПЗУ.
Адаптеры специальные и универсальные
Обычно адаптер представляет собой жгут с разъемами, которые подключаются к выходному разъему блока диагностики комплекса, блоку питания, и диагностируемой плате.
Спец. Адаптеры (содержат интерфейсы схемы подключения)
Для определения соответствия контактов выходных разъемов адаптера и каналов ввода-вывода комплекса, пользователем составляется файл описания конфигурации адаптера, путем заполнения соответствующего шаблона.
Для удобства пользователей в состав комплекта входят универсальные адаптеры. Это печатная плата, на которой установлены разъемы подключения к комплексу и блоку питания.
Эмулятор ПЗУ
Предназначен для проведения работ по отладке и ремонту 8и и 16и разрядных МП устройств, имеющих в своем составе память программ на микросхемах ПЗУ различного типа. Диагностика осуществляется посредством выполнения тестовых программ, записываемых в ОЗУ эмулятор, с выводом результатов тестирования на экран монитора.
Блок “УБПС” для ремонта электроприводов
Универсальный блок преобразователей сигналов (УБПС) позволяет тестировать широкую гамму электроприводов постоянного и переменного тока. Это устройство представляет собой кросс-плату с набором сменных модулей, выполняющих функции сопряжения с платами электрических приводов. Состав модулей может расшириться.
Программатор микросхем EPROM и PROM
Программатор представляет собой адаптер с колодками для установки микросхем ППЗУ.
Поставляются программаторы
1.Для микросхем EPROM К573ЗРОР1, РФ2, РФ4, РФ5, 2716, 2532, 2732 и т.д.
2.Для микросхем PROM К155РЕ3, К556РТ4 и их аналогов.
Отличие программатора, поставляемого комплексом от стандартнх состоит в том, что пользователь по приведенной методике может самостоятельно изготовить программатор для требуемых микросхем ППЗУ
ПО комплекса состоит из
1.Базовых ПО – пакета программ “тест”
2.Тестовых программ самодиагностики комплекса
3.Библиотек тестовых программ для различных электронных устройств.
Сигнатурный анализ
Сигнатурный анализ предполагает использование избыточных циклических двоичных кодов (реакция аппаратуры на тестовые последовательности) короткий 16-ый код называемый сигнатурой. Необходимость сжатия двоичной последовательности произвольной длин вызвано тем, что современная техника использует достаточно сложные функциональные узлы, для диагностирования которых требуется большое число тестовых последовательностей для проверки всех возможных состояний устройства.
Измеряемые двоичные последовательности наводятся в контрольных точках под действием программного обеспечения. Сигнатуры контрольных точек указываются на схеме электрической принципиальной подобно тому, как на схемах аналоговых устройств указываются осциллограммы.
При поиске неисправностей достаточно установить режим исполнения тестовой программы и затем прослеживая сигнатуры контрольных точек, двигаясь от выхода ко входу найти элемент, у которого входные сигнатуры верны, а выходные – нет.
Сигнатурный анализ – сопоставление реальной сигнатуры контрольной точки устройства с эталонной, представленной на схеме или в таблице.
Наиболее эффективно сжимает информацию 16 разрядный регистр сдвига и сумматор по модулю 2. На 4 входа этого сумматора подаются сигналы обратной связи от регистра сдвига, причем точки съема сигналов обратной связи выбираются из учета получения наибольшей достоверности результата. На 5ый вход сумматора поступает двоичная последовательность с контролируемой точки схемы. Выход сумматора подключен на вход регистра сдвига.
Математическая операция осуществляемая такой схемой соответствует последовательному делению входного потока информации разрядами обратной связи. Сдвиг информации в регистре осуществляется синхросигналом поступающим от диагностируемого устройства. Оттуда же поступают сигналы пуск и стоп формирующие интервал времени поступления двоичной последовательности.
В тактах с нулевого на седьмой – регистр сдвига работает обычно. На седьмом такте единица последовательности доходит до первого отвода обратной связи, передается на вход сумматора и складывается с входной информации. В результате обработки всей последовательности формируется шестнадцатеричный остаток. Для удобства двоичная сигнатура представляется на индикаторах в виде шестнадцатеричных цифр.
Тестовая
программа проверки устройства может быть записана в памяти диагностируемого устройства. При поиске неисправности сигнатурный анализатор подключается к диагностируемому устройству, запускается тест-программа, проверяется правильность подключения, пробник анализатора подсоединяется к контролируемому выходу схемы, прослеживаются сигнатуры, и при обнаружении с указанными в документации переходят к просмотру сигнатур в точках неисправной цепи, двигаясь от выхода ко входу.
Условия пригодности использования сигнатурного анализа:
1.Наличие средств, позволяющих разрывать в режиме контроля цепи обратной связи
Основные эксплуатационные характеристике
Эксплуатационное обслуживание – совокупность операций, процедур и процессов, предназначенных для обеспечения работоспособности ЭВС.
Эксплуатационные характеристики:
Общий коэффициент эффективности – отношение производительности и стоимости.
Надежность – свойство устройства выполнять заданные функции, сохраняя во времени свои характеристики в установленных пределах. Надежность характеризуется безотказностью, достоверностью функционирования и характеристики обслуживания.
Безотказность
Надежность ЭВМ и достоверность информации
1.Основные понятия и определения.
2.Обеспечение надежности и достоверности.
3.Проверка технического состояния ЭВМ.
1.Основные понятия и определения.
Под надежностью понимают свойство изделия (элемента, узла, устройства, системы) выполнять заданные функции и сохранять свои характеристики в установленных пределах при определенных условиях эксплуатации. Система перестает выполнять свои функции, если в ней возникают отказы или сбои.
Пол отказом понимают событие, заключающееся а полной утрате элементом работоспособности. Для ЭВМ отказ — это такое нарушение работоспособности, для восстановления которой требуются определенные действия обслуживающего персонала по ремонту, замене и регулировке неисправного элемента, узла или устройства. Отказ — это устойчивая неисправность ЭВМ. Если она возникла, то рано или поздно проявит себя в виде ошибки в информации. Если эта ошибка возникнет в сфере действия средств контроля, она может быть обнаружена.
Сбоем называют кратковременное самоустраняющееся нарушение нормального функционирования ЭВМ вследствие кратковременного воздействия на некоторый элемент внешних помех или некоторых других воздействий, а также из-за кратковременного изменения параметров элементов (например, нарушение контакта из-за вибрации). Сбой — это перемежающаяся неисправность ЭВМ; чтобы ее обнаружить, требуется совпадем, во времени следующих событий:
1) наличия сбойной неисправности;
2) такого взаимодействия кода, обрабатываемого на неисправном элементе, и вида неисправности, которые приводят к ошибке в информации;
3) включения средств контроля во время наличия в сфере его действия ошибочной информации.
После сбоя ЭВМ может длительное время работать исправно и нормально, но если не устранить последствия сбоя, неверная информация, циркулируя в системе, может привести к неверному решению задачи.
Поскольку в процессе эксплуатации ЭВМ момент возникновения отказа или сбоя непредсказуем, всякий такой факт представляется как случайное событие. Их последовательность образует поток случайных событий, основной характеристикой которого может служить среднее время между событиями. Обратная величина представляет собой среднее число случайных событий в потоке в единицу времени. Ее называют интенсивностью потока и обозначают λ. Потоки отказов и сбоев можно считать независимыми; для раздельного описания вводят интенсивность отказов λо и сбоев λс. В зависимости от решаемых задач либо анализируют эти потоки по отдельности, либо учитывают только один из них (как правило, поток отказов), либо рассматривают общий поток неисправностей.
Свойство надежности ЭВМ, т. е. ее способности функционировать в течение времени t без отказов и сбоев, характеризуется вероятностью того, что отказ или сбой могут возникнуть в ЭВМ в момент времени Θ> t : Р{ Θ> t } . Для расчета этой вероятности пользуются экспоненциальным законом надежности, полагая, что интенсивность отказов или сбоев λ - постоянная величина, не зависящая от времени (это имеет место на практике в период нормальной эксплуатации ЭВМ, когда период «приработки» элементов уже закончился, а время их «старения» еще не наступило):
Р(t)=exp(-λ t)
Если предположить, что отказы элементов, составляющих устройства ЭВМ, взаимонезависимы и отказ любого элемента приводит к отказу всего устройства, то интенсивность его отказов


где λi — интенсивность появления отказов в i-м элементе;
n — число элементов в устройстве.
При оценке вероятности отсутствия неисправностей в течение времени t предполагается, что в момент t = 0 неисправность отсутствовала. В общем случае это следствие того, что была выполнена процедура восстановления аппаратуры. Поэтому процесс эксплуатации системы должен рассматриваться как поток чередующихся событий — отказов и восстановлений. Если ЭВМ используется не постоянно, а эпизодически, то ее важными характеристиками являются:
• коэффициент готовности kr(t) — вероятность застать систему в исправном состоянии в произвольный момент времени t;
• вероятность успешного использования kr(t) P(τ)в течение заданного времени τ.
Всякая неисправность, возникшая в любом элементе ЭВМ, может привести к ошибке в результатах обработки информации, порядке выполнения операций, обмене с внешними устройствами и др. Следует говорить именно о возможности появления ошибки, так как ошибка есть результат взаимодействия конкретной неисправности с конкретной информацией. Так, например, если триггер в одном из разрядов регистра не переключается в состояние 1 (в нем постоянно хранится 0), то все коды, содержащие в этом разряде 0, будут храниться и считываться без ошибок. Кратковременные самоустраняющиеся неисправности типа сбоев не приведут к ошибке в информации, если во время их действия неисправный элемент не использовался. Следовательно, любая неисправность в зависимости от ее воздействия на обрабатываемую информацию может быть отнесена либо к классу обнаруживаемых, либо к классу необнаруживаемых.
Если в работе ЭВМ выделить некоторый интервал времени длительностью T, то из общего числа возникших неисправностей Nн(Т) проявят себя в виде ошибок в информации Nо(Т) и дадут безошибочные результаты Nно(Т). При определенных предположениях можно считать, что из общего числа полученных за время T результатов N(Т) доля верных (когда неисправностей не было)составит
Nвр(Т)/ N(Т)=[ N(Т) - Nн(Т)]/ N(Т)=1 - Nн(Т)/ N(Т)
доля ошибочных результатов будет равна Nо(Т)/ N(Т)и доля безошибочных (когда неисправность имела место, но не привела к искажению информации) составит Nно(Т)/ N(Т). Эти отношения могут служить оценками соответствующих вероятностей pвр, pо, pно. Заметим, что pвр(Т)=Р(Т).
Следовательно, одного понятия безотказности недостаточно, чтобы характеризовать правильность обработки информации. Для этого вводят специальную характеристику — достоверность результатов I на выходе ЭВМ, определяя ее как отношение среднего количества верных и безошибочных результатов Nвр(Т)+ Nно(Т)к среднему количеству всех =выданных результатов N за время Т :
I= [Nвр(Т)+ Nно(Т)] /N(Т)= pвр+ pно.
Если предположить, что неисправность всегда приводит к ошибке в информации, то достоверность будет определяться вероятностью исправной работы схемы: I(Т)= Р(Т).
При оценке достоверности для упрощения полагают, что на правильность обработки данных в равной степени влияют неисправности, возникшие в любом узле и устройстве ЭВМ.