

3. Принцип работы ад.
Созданное обмоткой статора вращающееся с частотой п1 магнитное поле (магнитный поток Ф1) пересекает проводники обмотки ротора и индуцирует в них ЭДС (рис, 12.14). Рассмотрим два проводника (1 и 2) обмотки ротора, расположенные диаметрально противоположно на осевой линии магнитного потока. Согласно правилу правой руки ЭДС в проводнике 1 направлена «на читателя», а в проводнике 2 — «от читателя». Проводники обмотки ротора (как короткозамкнутого, так и фазного) образуют замкнутую цепь, и под действием ЭДС в них возникает ток ротора, направление активной составляющей которого совпадает с направлением ЭДС. На проводники ротора с током, расположенные в магнитном поле, действуют силы F, пропорциональные магнитной индукции в месте расположения проводников, активной составляющей тока в них и длине проводников. Направление силы (см. рис. 12.14) определяют по правилу левой руки. Такие же силы действуют на все проводники обмотки ротора, при этом возникает вращающий момент на валу. Если вращающий момент превысит значение тормозного момента на валу, ротор начнет вращаться, и его частота вращения будет возрастать до тех пор, пока не наступит равновесие моментов при некотором значении частоты вращения n2=const.
Направление вращения ротора совпадает с направлением вращения магнитного поля статора. Но частота вращения n2 в режиме двигателя меньше n1. Если представить, что n2=n1, то проводники ротора не будут пересекаться вращающимся магнитным потоком, в них не будет индуцироваться ЭДС, в них не будет тока, а следовательно, сила F, действующая на проводники обмотки ротора, будет равна нулю. В таких условиях ротор сможет вращаться только по инерции. Но так как в реальном двигателе всегда имеются силы трения в подшипниках и трения вращающегося ротора о воздух, то ротор начнет тормозиться, т. е. получим
n2 < n1. Таким образом, чтобы возникали сила Р и вращающий момент, действующий на ротор, частота его вращения должна быть n2 < n1.
Скольжением называют относительную разность частот вращения магнитного поля и ротора. Скольжение обозначают буквой S и выражают в относительных единицах или в процентах:
 или
или
Частота
вращения ротора асинхронного двигателя
зависит как от скольжения, так и от
частоты вращения магнитного поля. Ее
можно определить следующим образом:
В режиме двигателя скольжение S изменяется от 0 до 1. При пуске двигателя п2 = 0 и S = 1.
Чем больше тормозной момент, создаваемый на валу двигателя, тем меньше частота вращения ротора n2 и больше скольжение S. Именно потому, что частота вращения ротора не равна синхронной частоте и изменяется с изменением нагрузки, двигатель называют асинхронным.
Билет
3. 1. Под
средним
значением син. величины
понимают ее среднеарифметическое
значение. Если определять среднеарифметическое
значение за период, оно будет =0, т.к.
положительная и отрицательная полуволны
син. кривых совпадают по форме. Поэтому
среднее значение син. тока опр-ют за
полпериода. Т.о. за среднее
значение син. тока
принимают такое значение постоянного
тока, при котором за полпериода переносится
такой же электрический заряд, что и при
син. токе.
Iср=(2/π)Im.
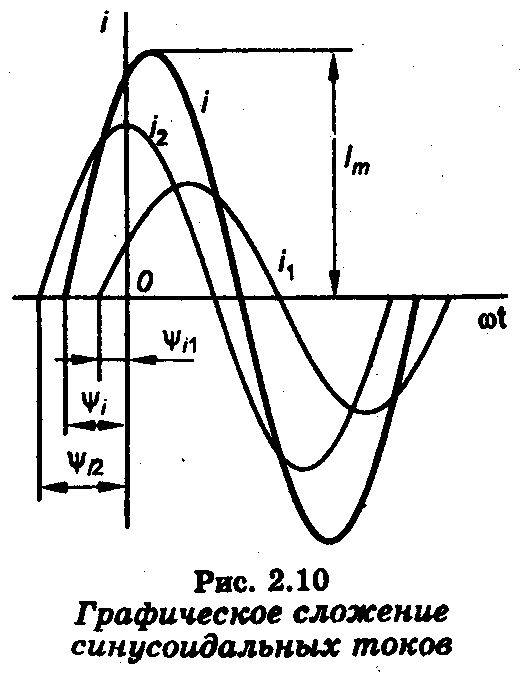
При сложении син. величин надо сложить ординаты для ряда значений угла ωt и по точкам построить синусоиду суммарной величины. На рис 2.10 показано сложение двух токой i1 и i2. Суммарный ток
I=Imsin(ωt+ψi), причем Im≠I1m+I2m, а ψi≠ψi2-ψi1.