

Вопрос 2. Принцип действия машины постоянного тока в генераторном и двигательном режимах. Направление тока, эдс, электромагнитного момента.
Электрическая машина предназначена для преобразования механической энергии в электрическую (генератор), электрической в механическую (двигатель) или электрической энергии одного вида в электрическую энергию другого вида (преобразователь).
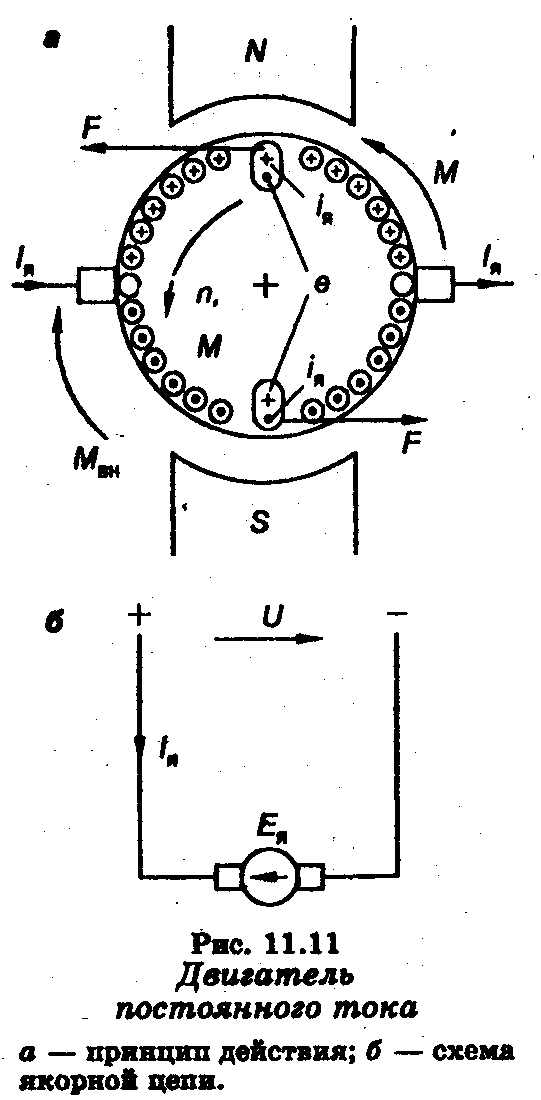
Принцип действия генератора состоит в том, что при передвижении проводника длиной l со скоростью v перпендикулярно магнитным линиям в поле с индукцией В в нём по закону электромагнитной индукции возникает ЭДС e=Blv.
Если замкнуть концы проводника через сопротивление, то ЭДС создаст ток. Направления ЭДС и тока у генератора всегда совпадают.
Ток взаимодействуя с магнитным потоком, в котором он находится, создаёт силу выталкивания проводника из магнитного поля, равную fm=Bil.
Сила взаимодействия fm проявляется как реакция на внешнюю силу перемещения проводника. Она равна и направлена противоположно внешней силе.
Принцип действия двигателя состоит в следующем: если к проводнику, находящемуся в магнитном поле, подвести напряжение, т. е. пропустить через него ток, то проводник под действием возникшей силы fm начнёт перемещаться. При перемещении вследствие пересечения проводником магнитного поля в нём возникает ЭДС, проявляющаяся как реакция на подведённое напряжение. Поэтому ЭДС в двигателе всегда направлена навстречу току.
Вопрос 3. Асинхронный двигатель с двойной «беличьей клеткой». Частотное регулирование частоты вращения ад. Как изменяется при этом механические характеристики.
Двухклеточные двигатели
Устройство и принцип работы. Двухклеточные двигатели имеют на роторе две короткозамкнутые беличьи клетки, одна из которых представляет собой так называемую пусковую обмотку, а вторая — рабочую. Рабочая обмотка выполняется из медных стержней и размещается в нижних частях пазов, а пусковая обмотка изготовляется из латунных или бронзовых стержней и располагается в верхних частях пазов, ближе к воздушному зазору. Сечение стержней пусковой обмотки может быть несколько меньше, чем у рабочей обмотки. Однако сечение и теплоемкость стержней пусковой обмотки должны быть достаточно велики, чтобы предотвратить чрезмерный нагрев этой обмотки при пуске. Иногда рабочую и пусковую обмотки размещают в отдельных пазах (рис. 27-5, а справа). В связи со сказанным активное сопротивление пусковой обмотки rп обычно в 2—4 раза больше активного сопротивления rр рабочей обмотки. Наоборот, индуктивное сопротивление рассеяния пусковой обмотки хоп в несколько раз меньше, чем хоp рабочей обмотки, поскольку последняя утоплена глубоко в стали сердечника ротора.
Вращающееся магнитное поле двигателя индуктирует в обеих обмотках ротора одинаковые э. д. с.
При пуске вследствие большой частоты тока ротора индуктивное сопротивление рабочей обмотки относительно велико и значительно больше полного сопротивления пусковой обмотки. Поэтому при пуске нагружена током в основном только пусковая обмотка, и ввиду большой величины ее активного сопротивления двигатель развивает большой пусковой момент. При разбеге двигателя частота тока ротора уменьшается, и при нормальной скорости вращения (s = 0,02 ÷ 0,05) индуктивные сопротивления рассеяния обмоток ротора будут в 20—50 раз меньше, чем при пуске. Поэтому в рабочем режиме активные сопротивления обмоток ротора значительно больше индуктивных и полные сопротивления обмотки определяются величинами активных сопротивлений. Вследствие этого при работе двигателя полное сопротивление рабочей обмотки значительно меньше, чем полное сопротивление пусковой, и током нагружена главным образом рабочая обмотка. Ввиду малости активного сопротивления этой обмотки двигатель имеет хороший к. п. д.
Таким образом, в двухклеточном двигателе при пуске происходит вытеснение тока ротора по направлению к воздушному зазору.
В пусковой обмотке двухклеточного двигателя при тяжелых условиях пуска (большой маховой момент приводимого агрегата и пуск под нагрузкой) выделяется большое количество тепла, и эта обмотка при пуске соответственно удлиняется, в то время как рабочая обмотка при пуске остается холодной и не удлиняется. Поэтому во избежание нарушения сварных соединений стержней с торцовыми короткозамыкающими кольцами стержни пусковой и рабочей обмоток присоединяются к отдельным кольцам.
Регулирование скорости изменением первичной частоты (частотное регулирование) требует применения источников питания с регулируемой частотой (синхронные генераторы с переменной скоростью вращения и др.). Поэтому данный способ регулирования используется
главным образом в случаях, когда для целых групп двигателей необходимо повышать (n > 3000 об/мин) скорости вращения (например, ручной металлообрабатывающий инструмент, некоторые механизмы деревообрабатывающей промышленности и др.) или одновременно и плавно их регулировать (например, двигатели рольгангов мощных прокатных станов и др.). С развитием полупроводниковых преобразователей все более перспективным становится также индивидуальное частотное регулирование скорости вращения двигателей. Схему короткозамкнутого асинхронного двигателя с частотным управлением при помощи полупроводниковых преобразователей можно получить, если на схеме заменить явно-полюсный ротор на ротор с обмоткой в виде беличьей клетки и питать эту схему от сети переменного тока через полупроводниковый выпрямитель. Управление инвертором при этом производится особым преобразователем частоты вне зависимости от положения ротора двигателя. Величина напряжения регулируется, с помощью выпрямителя.
Если пренебречь относительно небольшим падением напряжения в первичной цепи асинхронного двигателя, то
U1=E1= 4,44f1w1rоб1Ф
Существенное изменение величины потока Ф при регулировании n нежелательно, так как увеличение Ф против нормального вызывает увеличение насыщения магнитной цепи и сильное увеличение намагничивающего тока, а уменьшение Ф вызывает недоиспользование машины, уменьшение перегрузочной способности и увеличение тока I2 при том же значении М и т. д. Поэтому в большинстве случаев целесообразно поддерживать Ф = const. При этом следует, что одновременно с регулированием частоты пропорционально ей необходимо изменять также напряжение, т. е. поддерживать
U1/f1=const.
Отступление от этого правила целесообразно только в случаях, когда Мст быстро уменьшается с уменьшением n (например, приводы вентиляторов, когда Мст =n2), в этом случае более быстрое уменьшение по сравнению с f1 вызывает уменьшение Ф и улучшает энергетические показатели двигателя и в то же время уменьшение Мm с точки зрения перегрузочной способности не опасно.
При широком диапазоне регулирования правильнее поддерживать
Ф=Е1/f1=const.
К недостаткам частотного регулирования относится громоздкость и высокая стоимость питающей установки.
Закон частотного регулирования:


Билет 11
-
Трехмазная система электрических цепей представляет собой совокупность электрических цепей, в которых действуют три синусоидальные ЭДС одной и той же частоты, сдвинутые друг относительно друга по фазу и создаваемые общим источником энергии.Если все 3 ЭДС равны по значению и сдвинуты по фазе на 120 градусов по отношению друг другу, то такую систему ЭДС называют симметричной, если сдвинуты на угол не равный 120-несимметричный.

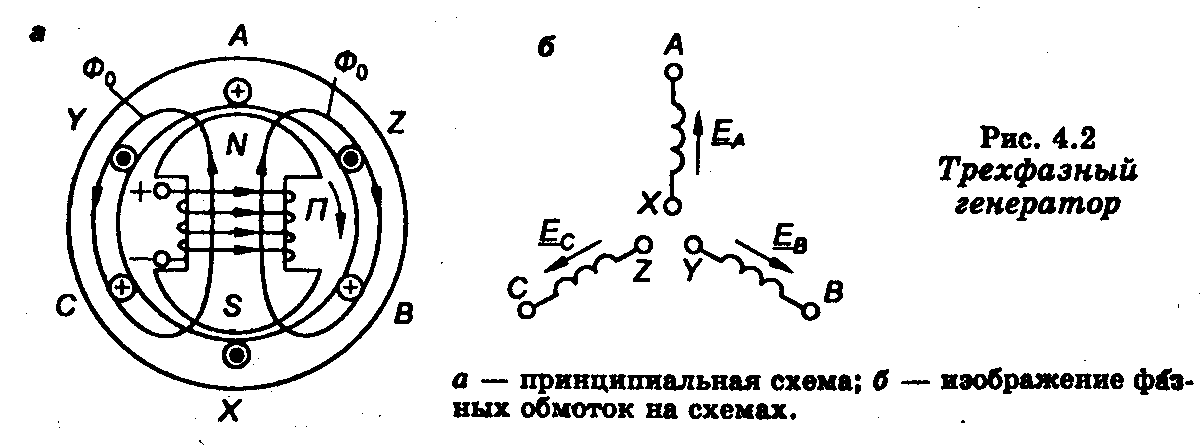
Трехфазная система ЭДС создается трехфазными генераторами. В неподвижной части генератора (статоре) размещают три обмотки, сдвинутые в пространстве на 120° (рис. 4.2). Это фазные обмотки, или фазы, которые обозначают А, В и С. Этими же буквами обозначают начала обмоток фаз генератора. Концы обмоток обозначают соответственно X, У и Z. На рис. 4.26 показано, как изображают на схемах обмотки генератора с условными положительными направлениями ЭДС.
Каждая фазная обмотка генератора изображена на рис. 4.2а одним витком (у реальных генераторов каждая обмотка имеет множество витков, расположенных в нескольких соседних пазах, занимающих некоторую дугу внутренней окружности статора). На вращающейся части генератора (роторе) располагают обмотку возбуждения, которую подключают к источнику постоянного тока. Ток обмотки возбуждения создает магнитный поток Ф0, постоянный (неподвижный) относительно ротора, но вращающийся вместе с ним с частотой п. Вращение ротора осуществляется каким-либо двигателем.
СОЕДИНЕНИЕ ОБМОТОК ГЕНЕРАТОРА И ФАЗ ПРИЕМНИКА ЗВЕЗДОЙ
Каждая фаза трехфазного генератора может являться источником питания для однофазного приемника. В этом случае схема электрической цепи имеет вид, изображенный на рис. 4.6, т. е. каждая фаза работает отдельно от других, хотя в целом цепь является трехфазной. Это трехфазная несвязанная система.
ЭДС любой обмотки генератора представляет собой разность потенциалов начала и конца этой обмотки. При этом потенциал одной какой-либо точки (или начала, или конца обмотки) можно считать равным нулю. Тогда комплексный потенциал другой точки будет иметь точно определенное значение.
Принимая равными потенциалы точек, соответствующих концам X, У и Z обмоток фаз генератора, можно объединить их в одну точку N (рис. 4.7). Концы фаз приемников (Zа, ZЬ и ZС) также соединяем в одну точку п. Такое соединение обмоток генератора называют соединением звездой (Y). Звездой можно соединять также фазы приемника. Точки N u n называют нейтральными, а провод, соединяющий точку N генератора с точкой п приемника, — нейтральным. Провода А-а, В-b и С-с, соединяющие начала фаз генератора и приемника, называют линейными. На электрических схемах линейные провода принято обозначать латинскими буквами Li, L2 и L3 соответственно, а нейтральный провод — буквой N.
Напряжение между началом и концом фазы — фазное напряжение С7Ф. Таким образом, имеется три фазных напряжения — Ua Ub Uc. Обычно за условное положительное направление ЭДС генератора принимают направление от конца к началу фазы (см. рис. 4.6 и 4.7). Положительное направление тока в фазах совпадает с положительным направлением ЭДС, а положительное направление падения напряжения (напряжение) на фазе приемника совпадает с положительным направлением тока в фазе. Положительным направлением напряжения на фазе генератора, как и на фазе приемника, является направление от начала фазы к ее концу, т. е. противоположное положительному направлению ЭДС.
Напряжение между линейными проводами — линейное напряжение Uл. Таким образом, имеется три линейных напряжения Uав,Uвc и Нса, условные положительные направления которых приняты от точек, соответствующих первому индексу, к точкам, соответствующим второму индексу. Линейные напряжения определяют через известные фазные напряжения. Это соотношение может быть получено из уравнения, написанного по второму закону Кирхгофа для контура ANBA, если принять направление обхода контура от точки А к точке N и т. д.: Uа-Uв – Uab = 0. Аналогично могут быть найдены и напряжения Ubc и Uca. Отсюда
Uab=Ua-Ub,
U вс = Ив - Uc
UСА=Uс-UА.
Таким образом, комплексное линейное напряжение равно разности соответствующих комплексных фазных напряжений.
При построении векторных диаграмм напряжений удобно принимать потенциалы нейтральных точек N и п равными нулю, т. е. совпадающими с началом координатных осей комплексной плоскости (рис. 4.8). Таким образом, на векторной диаграмме удобно направить векторы фазных напряжений от точки АГ к точкам А, В и С, т. е. противоположно условному положительному направлению напряжений на схемах.
Для нахождения вектора линейного напряжения Uав-, как следует из (4.3), необходимо к вектору напряжения Uа прибавить вектор напряжения Uв с противоположным знаком. После переноса вектора Uав параллельно самому себе он соединит точки А и В на векторной диаграмме фазных напряжений.
Аналогично строят векторы линейных напряжений Uвc и Ucа- На векторной диаграмме напряжений векторы фазных напряжений образуют звезду, а векторы линейных напряжений — замкнутый треугольник, откуда следует, что сумма комплексных линейных напряжений всегда равна нулю, т. е.
Так как при симметричной системе треугольник линейных напряжений равносторонний, то, чтобы найти соотношение между действующими значениями линейных и фазных напряжений, надо опустить перпендикуляр из точки N на вектор напряжения Uав. Тогда АВ = Uaв = 2Uвсos30°.
Таким образом, если система напряжений симметрична, то при соединении звездой линейное напряжение в >/з = 1,73 раза больше фазного напряжения. Предусмотренные ГОСТ и применяемые на практике напряжения переменного тока 127, 220, 380 и 660 В как раз и отличаются друг от друга в 1,73 раза. Если С7Л = 220 В, то С/ф = 127 В, что обозначают как 220/127 В. Кроме того, применяют системы 380/220 и 660/380 В.
В четырехпроводной трехфазной цепи имеется два уровня напряжения, различающихся в 1,73 раза, что позволяет использовать приемники с различным номинальным напряжением.
Ток в фазах генератора или приемника называют фазным током 1Ф. Ток в линейных проводах называют линейным током 1Л. Так как обмотка генератора, линейный провод и приемник, принадлежащие одной фазе, соединяются последовательно, то при соединении звездой линейный ток равен фазному:
Ток в каждой фазе может быть определен по закону Ома для цепи синусоидального тока.
Ток в нейтральном проводе равен сумме комплексных фазных токов.
Зная модули IА, Iв,Iс сдвиги фаз между векторами соответствующих фазных напряжений и токов, можно построить векторную диаграмму (рис. 4.9). При построении принято, что система фазных напряжений симметрична (что на практике почти всегда имеет место), а сопротивления фаз приемников различны. В результате фазные токи оказываются различными по значению и сдвинутыми по фазе на различные углы. Геометрическим сложением фазных токов находят век-
тор тока In. Чем больше различие в фазных токах, тем больше ток в нейтральном проводе.
При симметричной системе напряжений и симметричной нагрузке, когда Za=Zb=Zc=Z — т. е. когда Ra=Rb=Rc Хa = Хь = Хс, фазные токи равны по значению, и сдвиг по фазе одинаков:
Ia= =Iв = Ic =Iф
Итак, фазные токи при симметричной нагрузке образуют симметричную систему, вследствие чего ток In в нейтральном проводе равен нулю:
Векторная диаграмма напряжений и токов для симметричной нагрузки показана на рис. 4.10.
При симметричной нагрузке создается такой режим трехфазной цепи, при котором в нейтральном проводе тока нет. Следовательно, можно отказаться от нейтрального провода и перейти к трехпроеодной трехфазной цепи, изображенной на рис. 4.11.


-
МОЩНОСТЬ ПОТЕРЬ
В процессе преобразования энергии в машинах постоянного тока часть энергии преобразуется в теплоту и рассеивается в машине. Различают следующие виды потерь энергии, а следовательно, мощности потерь:
1. Электрические потери Рп.пр — это потери на нагрев проводов обмоток якоря, добавочных полюсов, возбуждения и др. В каждой обмотке и в регулировочных реостатах ДрВ и ДрЯ электрические потери пропорциональны квадрату тока: Рп.пр = 12В, где / — ток в них; Я — их сопротивление. Электрические потери в щеточном контакте
пропорциональны току якоря и падению напряжения под щеткой, т. е. Ри.щ = 1яАищ. а 2. Потери в стали магни-
"лр топровода от гистерезиса и вихревых токовРпс. Эти поте-п.с+рп.мх ри пропорциональны квадрату магнитной индукции и частоте вращения якоря.
3. Механические потери
Энергетическая^иаграмма Рп.мх - ЭТО потери, вызван-двигателя постоянного тока ные трением в подшипниках,
щеток о коллектор и вращающегося якоря о воздух. Механические потери пропорциональны частоте вращения.
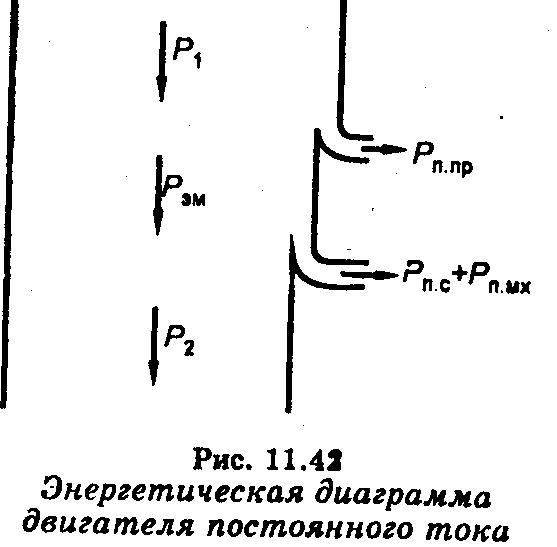
В качестве примера на рис. 11.42 представлена энергетическая диаграмма двигателя, показывающая баланс мощностей в нем. К двигателю из сети подводится электрическая энергия, мощность которой Р\ = и (1Я + 1В). Часть этой энергии с мощностью Рп.пр тратится на нагрев проводов обмоток. Оставшаяся часть мощности Рэм, называемая электромагнитной мощностью, характеризует ту часть электроэнергии, которая преобразуется в механическую энергию, в результате чего происходит вращение якоря. Часть мощности Рп.с определяет энергию, затрачиваемую на нагрев стального магнитопровода якоря, часть Рп.мх — на трение. Оставшаяся мощность Р2 представляет собой полезную механическую мощность на валу двигателя.
КПД двигателя и генератора г| = Рг/Рь где Р2 — механическая мощность на валу двигателя или электрическая мощность генератора, отдаваемая приемнику; Рх — мощность электрической энергии, подводимой к двигателю из сети, или механическая мощность приводного двигателя, вращающего якорь генератора.
Номинальное значение КПД двигателей малой мощности составляет 0,78...0,85, а двигателей средней и большой мощности — 0,85...0,94.

МОЩНОСТЬ ПОТЕРЬ
В процессе преобразования энергии в машинах постоянного тока часть энергии преобразуется в теплоту и рассеивается в машине. Различают следующие виды потерь энергии, а следовательно, мощности потерь:
1. Электрические потери Рп.пр — это потери на нагрев проводов обмоток якоря, добавочных полюсов, возбуждения и др. В каждой обмотке и в регулировочных реостатах ДрВ и ДрЯ электрические потери пропорциональны квадрату тока: Рп.пр = 12В, где / — ток в них; Я — их сопротивление. Электрические потери в щеточном контакте
пропорциональны току якоря и падению напряжения под щеткой, т. е. Ри.щ = 1яАищ. а 2. Потери в стали магни-
"лр топровода от гистерезиса и вихревых токовРпс. Эти поте-п.с+рп.мх ри пропорциональны квадрату магнитной индукции и частоте вращения якоря.
3. Механические потери
Энергетическая^иаграмма Рп.мх - ЭТО потери, вызван-двигателя постоянного тока ные трением в подшипниках,
щеток о коллектор и вращающегося якоря о воздух. Механические потери пропорциональны частоте вращения.
В качестве примера на рис. 11.42 представлена энергетическая диаграмма двигателя, показывающая баланс мощностей в нем. К двигателю из сети подводится электрическая энергия, мощность которой Р\ = и (1Я + 1В). Часть этой энергии с мощностью Рп.пр тратится на нагрев проводов обмоток. Оставшаяся часть мощности Рэм, называемая электромагнитной мощностью, характеризует ту часть электроэнергии, которая преобразуется в механическую энергию, в результате чего происходит вращение якоря. Часть мощности Рп.с определяет энергию, затрачиваемую на нагрев стального магнитопровода якоря, часть Рп.мх — на трение. Оставшаяся мощность Р2 представляет собой полезную механическую мощность на валу двигателя.
КПД двигателя и генератора г| = Рг/Рь где Р2 — механическая мощность на валу двигателя или электрическая мощность генератора, отдаваемая приемнику; Рх — мощность электрической энергии, подводимой к двигателю из сети, или механическая мощность приводного двигателя, вращающего якорь генератора.
Номинальное значение КПД двигателей малой мощности составляет 0,78...0,85, а двигателей средней и большой мощности — 0,85...0,94.
-
Изменение числа пар полюсов. Изменить число пар полюсов можно только для обмотки статора, поэтому этот способ применяют для двигателей с короткозамкнутым ротором. Число пар полюсов можно изменить либо располагая на статоре несколько (обычно две) обмоток, каждая из которых имеет разное число пар полюсов и которые включают не одновременно, либо переключая секции каждой фазной обмотки (соединяя их параллельно, последовательно, согласно или встречно).
На рис. 12.36 показан один из примеров переключения секций (катушек). Рассмотрим одну фазу, ток в которой имеет максимальное значение. Первую катушку составляют проводники 1 и 2, вторую катушку — проводники 3 и 4. При соединении конца первой катушки с началом второй (согласное включение) получим направление токов в проводниках, показанное на рис. 12.36а. При этом число пар полюсов р = 2. При соединении конца первой катушки с концом второй (встречное включение) получим р = 1 (рис. 12.366). Частота вращения магнитного потока статора n = 60f/р при таком изменении числа пар полюсов изменится в два раза. Таким образом, ясно, что регулирование частоты вращения возможно только ступенями. Если на статоре расположены две обмотки, включаемые поочередно, и если возможно включение секций по разным схемам, то двигатель получается многоскоростным. Такой двигатель может иметь частоты вращения п1 = 3000, 1500, 1000, 500 об/мин. Примерно такое же соотношение получается для частот вращения ротора п2. Многоскоростные двигатели имеют большие массы и габариты, чем двигатели нормального исполнения.

Билет 12
1)

2) КЛАССИФИКАЦИЯ ГЕНЕРАТОРОВ ПОСТОЯННОГО ТОКА
Классификация генераторов постоянного тока производится по способу их возбуждения. Они подразделяются на генераторы с независимым возбуждением и самовозбуждением.
Генераторы первого типа выполняются с электромагнитным и магнитоэлектрическим возбуждением. В генераторах с электромагнитным возбуждением обмотка возбуждения, располагаемая на главных полюсах, подключается к независимому источнику питания (рис. 1, а). Ток в цепи возбуждения Iв может изменяться в широких пределах с помощью переменного резистора Ra. Мощность, потребляемая обмоткой возбуждения, невелика и в номинальном режиме составляет 1-5 % номинальной мощности якоря генератора. Обычно процентное значение мощности возбуждения уменьшается с возрастанием номинальной мощности машины.
Генераторы с магнитоэлектрическим возбуждением возбуждаются постоянными магнитами, из которых изготовляются полюсы машины. С таким видом возбуждения выполняются генераторы относительно небольшой мощности, которые применяются в специальных случаях. Недостатком генераторов с магнитоэлектрическим возбуждением является трудность регулирования напряжения.
У генераторов с самовозбуждением обмотка возбуждения получает питание от собственного якоря. В зависимости от способа ее включения генераторы с самовозбуждением подразделяются на генераторы с параллельным, последовательным и смешанным возбуждением.

Схема соединения генератора параллельного возбуждения показана на рис. 1,б. Переменный резистор RB дает возможность изменять ток возбуждения Iв и, следовательно, выходное напряжение. Ток якоря Ia у этого генератора равен Ia = I + Iв, где I - ток нагрузки. Ток возбуждения относительно мал и для номинального режима составляет 1-5 % номинального тока машины.
У генератора последовательного возбуждения обмотка возбуждения соединяется последовательно с якорем и ее ток возбуждения равен току якоря и току нагрузки: Iв = Ia =I (рис. 1, в).
У генераторов смешанного возбуждения (рис. 1, г) на полюсах размещаются две обмотки. Одна из них, имеющая большое число витков и выполненная из проводников относительно небольшого сечения, включается параллельно с якорем, а другая обмотка с малым числом витков из проводников большого сечения включается последовательно с якорем. Ток якоря такого генератора равен Ia = I + Iв.
У этих генераторов параллельная и последовательная обмотки могут быть включены согласно (МДС этих обмоток направлены одинаково) и встречно (их МДС направлены противоположно). В зависимости от этого различаются генераторы смешанного согласного включения и генераторы смешанного встречного включения. Обычно в генераторах смешанного возбуждения основная часть МДС возбуждения создается параллельной обмоткой. Генераторы параллельного, последовательного и смешанного возбуждения иногда называют соответственно генераторами шунтового, сериесного и компаундного возбуждения.
Согласно ГОСТ 183-74 для машин постоянного тока принято следующее обозначение выводов обмоток: обмотки якоря Я1-Я2, параллельной обмотки возбуждения Ш1-Ш2, последовательной обмотки возбуждения С1-С2, обмотки дополнительных полюсов Д1-Д2, компенсационной обмотки К1-К2. Цифра 1 обозначает начало, а 2 - конец обмотки.