

1. Основные понятия и определения
Совокупность устройств, обеспечивающих автоматический процесс управления, называется автоматической системой.
Основными элементами автоматической системы являются объект управления и управляющее устройство.
Любая автоматическая система является информационной системой, по-
скольку внутри ее циркулируют потоки информации.
Носителями информации являются сигналы.
Информацией называется любая совокупность сведений, первичным ис-
точником которых является опыт.
Различают начальную и рабочую информацию. Начальная (априорная) информация - это совокупность сведений о процессе управления, необходимых для построения и функционирования системы управления. Рабочая информа-
ция - это совокупность сведений о состоянии процесса, используемая в процес-
се управления.
Работа любой системы радиоавтоматики происходит в условиях дейст-
вия различных помех. Помехи вносят дезинформирующие действия в процесс управления.
Управлением называется любое действие, основанное на использовании
информации и вносящее желаемое изменение в процесс, подлежащий управле-
нию.
Регулирование - это частный случай управления, при котором желаемое состояние объекта управления обеспечивается путем стабилизации одной или нескольких физических величин относительно заданных значений.
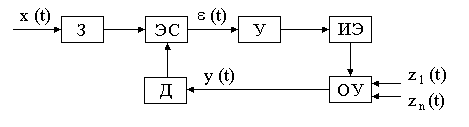
Большинство современных систем радиоавтоматики строится на основе использования принципа регулирования по отклонению. Данный принцип пре-
дусматривает отрицательную обратную связь выхода системы с ее входом. В результате этого система получается замкнутой. На схеме (рис.1.1) на элемент сравнения (ЭС) через задатчик (З) поступает входное управляющее воздейст-
вие x (t). От датчика (Д) поступает сигнал обратной связи у (t). Назначение за-
датчика (З) и датчика (Д) - преобразование сигналов x (t) и у (t) в форму
электрических напряжений. В некоторых системах радиоавтоматики З и Д мо-
гут отсутствовать.
На выходе элемента сравнения (ЭС) образуется сигнал ошибки (t), ко- торый усиливается в усилителе (У). Выходной сигнал усилителя (У) воздейст- вует на исполнительный элемент (ИЭ), который в свою очередь воздействует
на объект управления (ОУ) так, чтобы все время сводить сигнал ошибки к ми-
нимуму.
Кроме входного управляющего воздействия x (t), на систему радиоав-
томатики действуют различные возмущения z 1 (t), z 2 (t), …, z n (t).
Помимо указанных элементов, в систему радиоавтоматики могут вхо- дить корректирующие элементы (КЭ), необходимые для придания системе тре- буемых качественных показателей при надлежащем запасе устойчивости.
Система является устойчивой, если, выведенная из состояния равнове-
сия каким-либо возмущением, возвращается в исходное состояние после устра-
нения этого возмущения.
Наряду с принципом регулирования по отклонению, в ряде случаев в системах радиоавтоматики применяется принцип регулирования по возмуще-
нию, сущность которого сводится к компенсации возмущения. Этот принцип реализуется в разомкнутых системах. Достоинством принципа регулирования
по возмущению является простота реализации. Недостаток этого принципа -
отсутствие контроля выходной величины у (t), исключающее ее воздействие
на объект управления (регулирования).
В ряде случаев применяют комбинированные системы радиоавтоматики,
сочетающие оба принципа регулирования.
Контрольные вопросы
1. Какие элементы автоматической системы являются основными ?
2. В чем заключается отличие принципа регулирования по отклонению
от принципа регулирования по возмущению ?
3. Для чего предназначены в автоматической системе элементы, назы-
ваемые датчиком и задатчиком ?
4. В чем заключается назначение в автоматической системе корректи-
рующих элементов ?
5. Какая автоматическая система считается устойчивой ?