

12. Понятие о дискретных функциях и разностных уравнениях
Сигналы в импульсных системах могут быть представлены в виде дис-
кретных функций времени, т. е. функций, значения которых определены только
для дискретных значений аргумента t=nT. Между этими значениями независи-
мой переменной дискретная функция равна нулю.
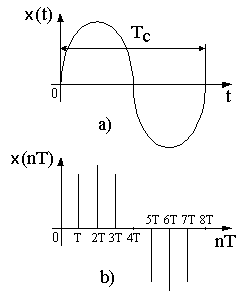
Дискретную функцию можно образовать из любой непрерывной функ-
ции, если принять во внимание только ее дискретные значения в равностоящие друг от друга моменты времени (рис.12.1). Эти ординаты называют дискретами.
Дискретную функцию будем обозначать символом x (nT), где T-период дискретности; n – любое целое число. Для того чтобы получить функцию
x(nT) по заданной непрерывной функции x(t), в последней необходимо заме-
нить t на nT.
Примеры непрерывных функций и соответствующих им дискретных функций приведены ниже.
Непрерывная функция Дискретная функция
x(t) x(nT)
1(t) 1(nT) At AnT At2 A(nT)2
e –a t e –a nT
sinct sincnT
Заметим, что дискретная функция не является однозначной: ей могут соответствовать различные непрерывные или разрывные функции, если только
их ординаты в моменты времени t = nT равны значениям функции x(nT). Для устранения этой неоднозначности в рассмотрение вводят смещенные дискрет- ные функции, позволяющие «просматривать» процессы внутри периодов дис- кретности Т.
Иногда оказывается удобным перейти к относительному масштабу вре-
_
мени
нице.
t t
T
. При этом интервал между дискретами становится равным еди-
Как известно, скорость изменения непрерывной функции определяется
ее первой производной. Скорость изменения дискретной функции x(nT) ха- рактеризуется ее первой разностью, деленной на период дискретности Т. Сле- довательно, аналогом дифференциалов для дискретных функций являются разности, а интегралов – суммы.
Первая разность, или разность первого порядка, дискретной функции x(nT) x(nT) = x(nT+Т) - x(nT) также является дискретной функцией времени.
Вторая разность, или разность второго порядка, определяется как первая разность от первой разности:
2 x(nT) = x(nT+Т) - x(nT),
или 2 x(nT) = x(nT+2Т) - 2 x(nT+Т) + x(nT).
Разность k – го порядка k x(nT) = k-1 x(nT+Т) - k-1x(nT).
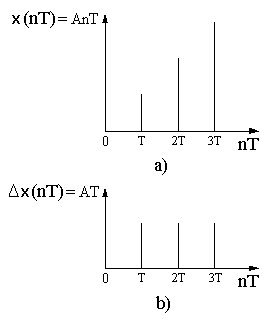
Рис.12.2. Дискретная функция (a) и ее первая разность (b)
Рассмотрим пример. Дана дискретная функция x(nT)=AnT (рис.12.2).
Ее первая разность x(nT) = А(nT+Т) – АnT = АТ является единичной
ступенчатой дискретной функцией. Вторая и высшие разности этой функции
равны нулю.
Часто на практике вычисляют запаздывающую разность, которую легче получить техническими средствами:
x(nT)=x(nT)-x(nT-T)=x(nT)e-pT.
Известно, что исследование динамики непрерывных систем основано на
составлении и решении дифференциальных уравнений. Динамические процессы
в дискретных автоматических системах описываются разностными уравнениями,
или уравнениями в конечных разностях. Линейное неоднородное разностное уравнение с постоянными коэффициентами имеет следующий вид:
cmmxвых(nT) + cm-1m-1xвых(nT) + … + c1xвых(nT) + c0xвых(nT) =
b0xвх(nT) + b1xвх(nT) + … + bk-1k-1xвх(nT) +bkkxвх(nT),
где хвх(nT) – известная дискретная функция (задающее воздействие); хвых(nT) –
дискретная функция, определяемая уравнением (решение); - разности I – х
порядков; bi и ci – постоянные коэффициенты.
Контрольные вопросы
1. Что такое дискретная функция времени ?
2. Что является аналогами дифференциалов и интегралов при использо-
вании дискретных функций времени ?
3. Чем описываются динамические процессы в дискретных системах ра-
диоавтоматики ?