

-
Зобразіть функціональну схему і виберіть комплекс технічних засобів для одноконтурної аср pH.
-
Порядок розрахунку каскадної аср.
Розрахунок
каскадних АСР передбачає запізнення
настроювань регуляторів (основного та
допоміжного) при заданих динамічних
характеристиках об’єктів OP1
та OP2,
а також виконавчого механізму,
вимірювальних перетворювачів та інших
засобів автоматизації. Оскільки
настроювання основного та допоміжного
регуляторів взаємопов’язані, їх
розрахунки виконують методом ітерацій.
Спочатку треба визначити параметри
настроювання внутрішнього регулятора.
Для цього необхідно розімкнути зовнішній
контур на вході вимірювального
перетворювача ВП2
і визначити параметри настроювання
регулятора R2
як
для одноконтурної АСР. У розрахунку
настроювань регулятора R1
внутрішній
контур замінюють еквівалентною
передаточною функцією
 (показано пунктиром на рис.3.9). У цьому
разі каскадна АСР перетворюється на
одноконтурну, для якої знаходять
параметри настроювання регулятора R1.
Потім розрахунок продовжують у такій
послідовності:
(показано пунктиром на рис.3.9). У цьому
разі каскадна АСР перетворюється на
одноконтурну, для якої знаходять
параметри настроювання регулятора R1.
Потім розрахунок продовжують у такій
послідовності:
-
розраховують перехідний процес каскадної АСР і визначають параметри його якості;
-
у разі незадовільної якості перехідного процесу змінюють у той чи інший бік настроювання регулятора R2;
-
знову розраховують перехідний процес і визначають його якість;
-
якщо якість перехідного процесу не задовільняє вимоги, то знову змінюють настроювання регулятора R1 і так доти, доки якість перехідного процесу не відповідатиме певним вимогам.
У розрахунку каскадної АСР необхідно враховувати, що система регулювання в цілому може бути стійкою навіть у разі нестійкого внутрішнього контура. Але такого стану слід уникати, через те, що зовнішній контур іноді переводять на ручне керування. Для внутрішнього контура найдоцільніше використовувати П-регулятор з високим коефіцієнтом передачі. Невелика залишкова нерівномірність у разі зміни навантаження в результаті компенсується основним регулятором. Інтегральна складова у внутрішньому контурі виправдана, якщо внутрішній контур має невеликий коефіцієнт підсилення, що часто має місце при регулюванні витрат.
У процесі розробки каскадної системи потрібно намагатися уникати нелінійностей, які виникають у результаті великих сигналів у внутрішньому контурі. При дуже великому коефіцієнті підсилення регулятора R2 зміна якогось збурення або керуючого сигналу від основного регулятора спричиняє перенасичення допоміжного регулятора, що призводить до переміщення регулюючого органу в крайнє положення. Іноді система при цьому залишається стійкою, але перехідні процеси в ній гірші, ніж в одноконтурних АСР.
-
Зобразіть функціональну схему і виберіть комплекс технічних засобів для аср витрати рідини з відцентровим насосом.
-
Аср з додатковим імпульсом за похідною. Структурна схема.
Такі системи регулювання використовують тоді, коли об’єкт має регульований технологічний параметр, розподілений за просторовою координатою (наприклад, апарати колонного типу, трубчасті реактори, кожухотрубні теплообмінники з великою довжиною та ін.). Особливість таких об’єктів полягає в тому, що основною регульованою координатою є технологічний параметр на виході з апарата, збурення розподілені за довжиною апарата, а регулюючий вплив подається на його вхід. При цьому одноконтурні замкнені системи регулювання не забезпечують необхідної якості перехідних процесів через велику інерційність каналу регулювання.
Подавання на вхід регулятора додаткового імпульсу з проміжної точки апарата дає випереджаючий сигнал і регулятор включається в роботу раніше, ніж вихідна координата відхилиться від заданого значення.
Для забезпечення регулювання без статичної похибки необхідно, щоб в усталених режимах додатковий імпульс зникав. Для цього допоміжний імпульс пропускають через реальну диференціальну ланку з передаточною функцією.
Wд
(s)= Кд ,
/4.14/
,
/4.14/
 де
Кд-
коефіцієнт
передачі;
де
Кд-
коефіцієнт
передачі;
 ,
,
 -
сталі часу.
-
сталі часу.
Ефективність уведення додаткового імпульсу залежить від точки його вибору, яку визначають у кожному конкретному випадку динамічними властивостями об’єкта та умовами його роботи.
Розрахунок подібних систем регулювання аналогічний розрахунку каскадних АСР.
На рис. 4.5. допоміжну
формує ланцюжок, який складається з
вимірювального перетворювача ВП1
проміжної
координати
 ,
проміжного перетворювача ПП1
та реальної
диференцюючої ланки D.
Вихідний
сигнал диференціатора надходить на
вхід регулятора
R. Цей
зворотний зв’язок є гнучким і працює
лише в перехідних режимах роботи.
,
проміжного перетворювача ПП1
та реальної
диференцюючої ланки D.
Вихідний
сигнал диференціатора надходить на
вхід регулятора
R. Цей
зворотний зв’язок є гнучким і працює
лише в перехідних режимах роботи.
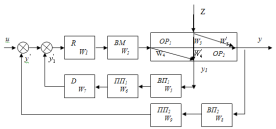
Рис. 4.5. Структурна схема АСР із допоміжною похідною
Як правило, такі АСР досліджуються по каналу збурення, розподіленого за просторовою координатою. Збурення Z діє як на вихідну координату об’єкта у, так і на проміжку у1.Завдяки тому, що технологічний параметр розподілений за лінійною координатою, дія збурення Z на проміжну координату у1 відбудеться швидше, ніж на координату у. Тому регулятор R почне працювати з моменту появи сигналу у1 і значно швидше, ніж зміниться сигнал у.
Структурна АСР із допоміжною похідною подібна каскадній, тобто має два контури: внутрішній і зовнішній. Передаточна функція для внутрішнього контура по каналу регулювання (при зміні завдання регулятора u) має вигляд:
 ,
/4.15/
,
/4.15/
а по каналу збурення
 :
:
 /4.16/
/4.16/
Передаточна функція
АСР по каналу регулювання
 :
:
 /4.17/
/4.17/
а по каналу збурення
 :
:
 /4.18/
/4.18/
Із рівнянь /4.15-4.18/ випливає, що передаточна функція диференціатора залежить віл параметрів регулятора. Із характеристичного рівняння для внутрішнього контура маємо:
 /4.19/
/4.19/
У /4.19/ введемо позначення еквівалентного об’єкта:
 ,
/4.20/
,
/4.20/
Якщо регулятор грунтується на ПІ-законі регулювання, то рівняння /4.19/ з урахуванням /4.14/набирає вигляду
 /4.21/
/4.21/
Із рівняння /4.21/
слідує, що в разі використання ПІ (або
ПІД) регулятора з достатньою точністю
можна вважати, що параметри диференціатора
будуть близькими до параметрів
регулятора, тобто
 ,
а
,
а
 .
.
Розрахунок АСР із додатковим імпульсом за похідною зводиться до такого:
-
визначають настроювальні параметри регулятора замкненої одноконтурної системи регулювання без внутрішнього контура;
-
використовуючи рівняння /4.21/знаходять параметри диференціатора;
-
розраховують перехідний процес АСР і визначають його якість;
якщо якість не відповідає необхідним вимогам, то потрібно змінити параметри диференціатора.