

1. Содержание понятий: автоматика, автоматизация, САУ, САР
2. Принципиальная и функциональная схемы САР
3. Основные виды САР. Стабилизация программного регулирования, следящие системы и экстримальные. Классификация САР по характеру воздействия регулятора на объект регулирования: непрерывного регулирования, импульсные и релейные системы
4. Измерительные системы САР (датчики). Требования, предъявляемые к ним. Основные виды датчиков, достоинства датчиков, преобразующих измеряемую величину в электрические сигналы. Классификация датчиков
5. Датчики активного сопротивления. Тензорезисторы, принцип работы, схемы включения, методы повышения чувствительности измерений и термокомпенсации. Достоинства и недостатки, область применения
6. Проволочные терморезисторы. Принцип работы, виды градуировок, схемы включения
7. Схема электронного автоматического моста типа КСМ-2
8. Полупроводниковые терморезисторы (термисторы), типы, принцип работы, достоинства и недостатки, область применения
9. Индуктивные датчики. Основные типы, принцип работы, достоинства и недостатки, область применения
10. Дифференциально-трансформаторная схема прибора типа КСД
11. Магнитоупругие датчики, принцип работы, статические характеристики, достоинства и недостатки, область применения
12. Емкостные датчики, основные типы, статические характеристики, достоинства и недостатки, область применения
13. Генераторные датчики. Термопары, основные типы, принцип работы, поправка на температуру холодного спая, основные измерительные схемы
14. Схема электронного автоматического потенциометра типа КСП-4
15. Сельсины, устройство и принцип работы. Работа в индикаторном режиме
16. Работа сельсинов в трансформаторном режиме
17. Тахогенераторы, их типы. Тахогенераторы постоянного тока, принцип работы, статические характеристики, достоинства и недостатки, область применения
18. Тахогенераторы переменного тока, принцип работы, статические характеристики, достоинства и недостатки, область применения
19. Усилительные элементы автоматики, требования, предъявляемые к усилителям, основные типы. Магнитные усилители. Устройство, принцип работы, схемы включения, достоинства и недостатки
20. Двухтактные магнитные усилители. Принцип работы, статические характеристики, достоинства и недостатки, область применения
21. Исполнительные механизмы автоматики, назначение, основные типы. Асинхронный двухфазовый двигатель переменного тока. Устройство, принцип действия, способ реверсирования, основные характеристики, достоинства и недостатки
22. Объекты регулирования и их характеристики: емкость, коэффициент емкости, самовыравнивание, устойчивые и неустойчивые объекты, коэффициент самовыравнивания, запаздывание процесса в объекте
23. Время разгона объекта и коэффициент усиления объекта. Определение основных свойств объекта
24. Законы регулирования, классификация регуляторов, схемы и их характеристики
25. Пропорциональный регулятор, закон регулирования, пример, переходная характеристика, достоинства, недостатки
26. Интегральные регуляторы: закон регулирования, пример, переходная характеристика, достоинства, недостатки
27. Пропорционально-интегральный регулятор, закон регулирования, пример, переходная характеристика
28. Пропорционально-дифференциальный регулятор, закон регулирования, пример, переходная характеристика
29. Пропорционально-интегрально-дифференциальный регулятор, закон рег., переходная характеристика
30. Автоматизация конвейерных линий. Пуск конвейеров по времени
31. Пуск конвейеров по скорости. Устройство реле скорости
32. Измерение уровня в бункерах. Работа уровнемера типа ИКС-2М
33. Автоматическое управление процессом перемешивания
34. Автоматическое управление процессом электронатяжения арматуры
35. Правила составления функциональных схем автоматизации
36. Типовые переходные процессы
37. Выбор настроек регуляторов
1. Содержание понятий: автоматика, автоматизация, сау, сар
Автоматика – наука, изучающая принципы и методы построения систем, выполняющих определенные функции без непосредственного участия человека.
Автоматизация производства – это процесс в развитии производства, при котором функции управления и контроля, ранее выполнявшиеся человеком, передаются приборам и автоматическим устройствам.
САУ – Система автоматического управления включает в себя объект управления и устройство управления.
САР – Система автоматического регулирования включает в себя объект регулирования и устройство регулирования (автоматический регулятор). САР предусматривает поддержание постоянной или изменяющейся по определенному закону величины без участия человека.
Объект управления (регулирования) — агрегат (аппарат), в котором протекает подлежащий управлению процесс.
Регулируемая величина – величина, которая регулируется или контролируется в САР.
Автоматический регулятор – устройство, или группа устройств, осуществляющих регулирование.
2. Принципиальная и функциональная схемы сар
Принципиальная схема – позволяет
судить о работе каждого элемента схемы.
Например, САР температуры пропарочной
камеры:
Объект регулир.: пропарочная камера (О)
Регулируемая величина:

Измер. преобразов. (датчик): термопара (ИЭ)
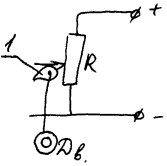
Элемент сравнения: потенциометр (ЭС)
Исполнительный механизм: двигатель (ИМ)
Регулирующий орган: заслонка (РО)
(ОВ – обмотка возбуждения, (УЭ) – усилительный элемент)
Функциональная схема – позволяет судить о работе всей системы в целом. На таких схемах каждый элемент заменяется прямоугольником и ему дается название в зависимости от выполняемых функций.

Структурная схема – аналогична функциональной и отличается показанными значениями входной и выходной величины и значениями передаточного коэффициента.
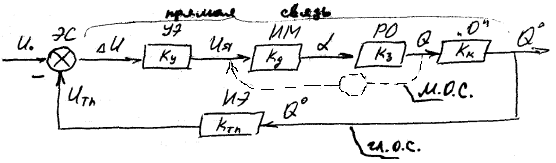
Особенности: 1) замкнута; 2) Каждый элемент имеет входную и выходную величину; 3) однонаправленность действия сигнала.
Связи: – это каналы, по которым сигналы передаются от одного элемента к другим. 1) Прямые и обратные; 2) Местные и главные; 3) Положительные и отрицательные; 4) Гибкие и жесткие.
Положительная обратная связь –
увеличивает действие входного сигнала,
отрицательная – уменьшает.
Жесткая связь – работает непрерывно (термопара),
Гибкая связь – в переходных процессах
3. Основные виды САР. Стабилизация программного регулирования, следящие системы и экстримальные. Классификация САР по характеру воздействия регулятора на объект регулирования: непрерывного регулирования, импульсные и релейные системы
Основные виды САР:
-
Система автоматической стабилизации: регулируемая величина остается неизменной. Поддержание на постоянном уровне с допустимой ошибкой регулируемой величины независимо от действующих возмущений.

(Регулирование скорости, напряжения,
температуры, давления, напр. стабилизатор
курса самолета)
-
Система программного регулирования: по определенной программе. Управляющее воздействие изменяется по заранее установленному закону в функции времени или координат системы. Точность управления характеризуется величиной ошибки. (Управление копировально – фрезерным станком).
-
Система экстремального регулирования: способны поддерживать экстремальное значение некоторого критерия (например, минимальное или максимальное), характеризующего качество функционирования объекта.

-
Система позиционного регулирования (релейного действия): позиционность определяется положением регулирующего органа (заслонка) в процессе регулирования. Если два положения (открыто/закрыто) – двухпозиционная, если есть промежуточные положения – трехпозиционная.

-
Система импульсного регулирования:
Следящие системы: управляющее воздействие также является величиной переменной (программное регулирование), но математическое описание его во времени невозможно, т. к. источник сигнала – внешнее явление, закон изменения которого заранее неизвестен. (Радиолокационная станция автоматического сопровождения самолёта).